Clear Sky Science · zh
一种为可植入生物混合系统设计的具有工程化生物物理学的肌神经执行器
把肌肉重建为智能的活体机器
想象一下,如果医生能把患者自身的肌肉改造成一个永不疲倦、可由计算机操控且可安全地长期置于脆弱器官旁的活体马达。本研究描述了一种做到这点的方法。研究者在大鼠身上构建了一种“肌神经执行器”——通过有意重排肌肉的神经连接,使其可以被电子设备驱动、抵抗疲劳,同时仍然表现得像自然组织。这样的活体执行器将来可能用于恢复运动、支持衰竭的器官,或为先进假肢提供逼真的触觉反馈。
为什么活体肌肉更适合做马达
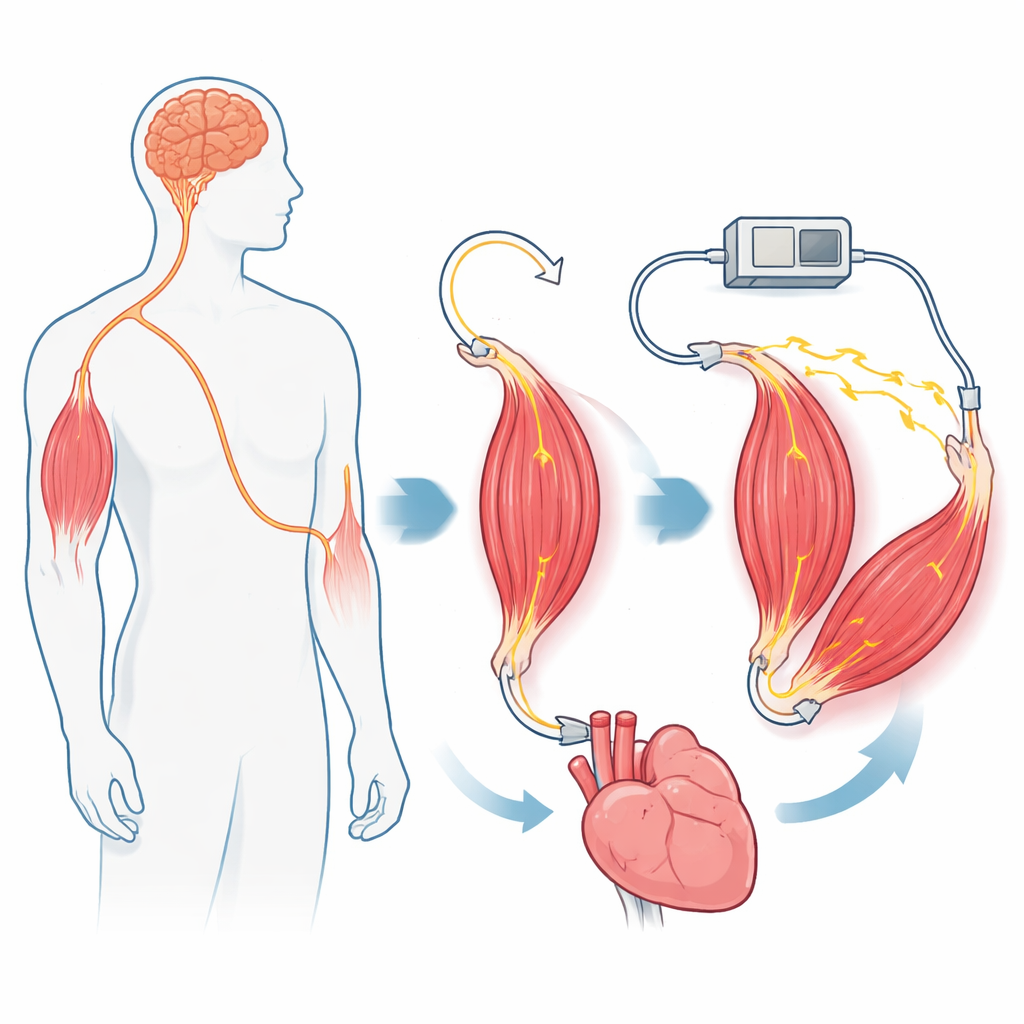
依靠电、空气或流体驱动的人工马达威力大,但它们通常很重、难以缩小到适合体内的尺寸,并且由不易与生物组织融合的材料制成。相比之下,骨骼肌轻便、能效高、自我修复,且天然设计用于体内工作。它可以生长、适应并对微弱的神经信号作出反应。然而,当肌肉直接由植入设备发出的电脉冲控制时,它们很快就会疲劳。产生疲劳的原因在于标准电刺激往往优先征募最大、最快但最不耐久的肌纤维。要把肌肉作为一种可靠的可植入马达利用,团队需要改变其神经纤维的组织和招募方式——同时不放弃肌肉的自然健康与可持续性。
交换神经通路以重写控制方式
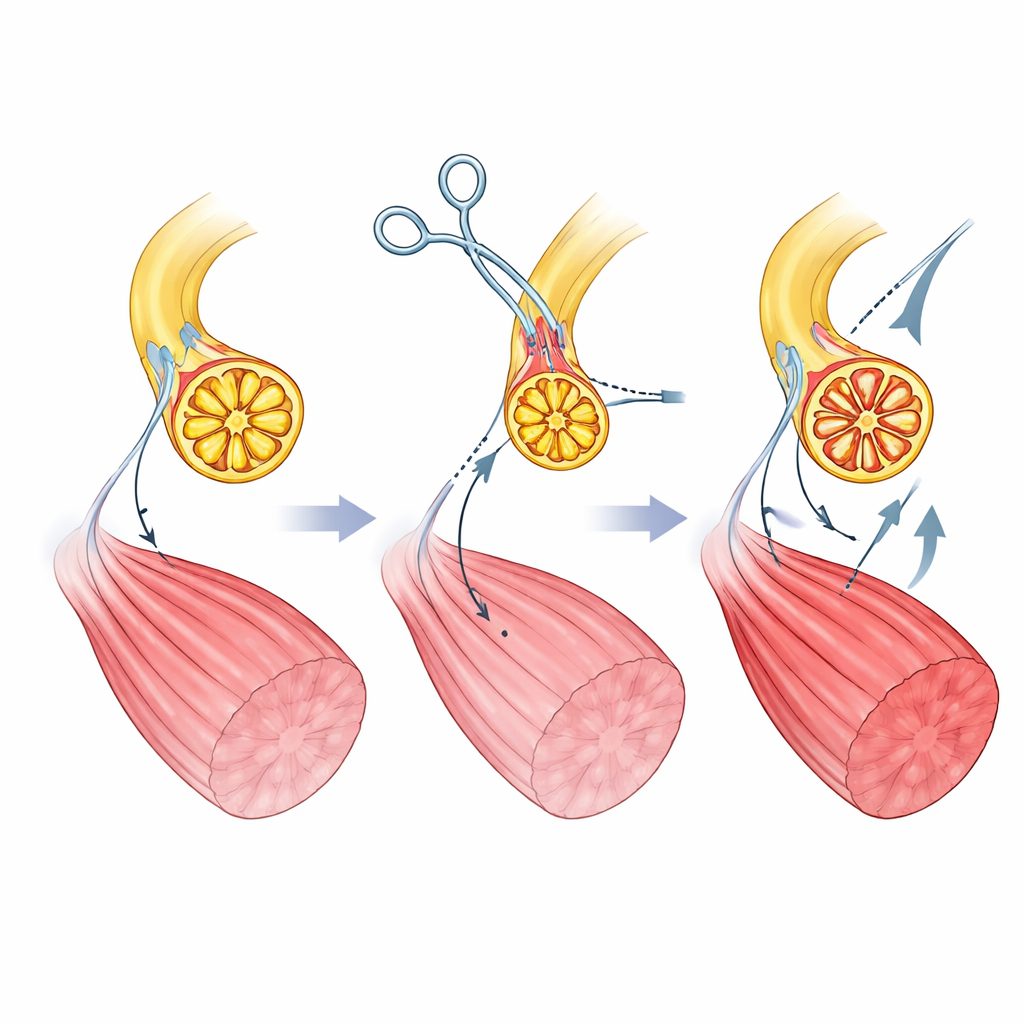
作者通过外科手术重接一块腿肌来在大鼠身上构建肌神经执行器。他们先切断携带来自脊髓命令的正常运动神经并阻止其再生,然后将另一条通常传递皮肤和组织的触觉与牵张信号的神经直接引入肌肉。随着时间推移,这条“感觉”神经在肌肉内部再生并与肌纤维形成新的接触点。显微镜观察显示,这些新的突触样连接在外观和功能上类似于正常的运动神经连接,且当感觉神经被电刺激时,肌肉恢复了收缩能力。重要的是,这条感觉神经的轴突比原来的运动神经更均一且尺寸更小,这为在计算机控制下实现更平衡的肌纤维招募奠定了基础。
在高强度工作下仍能持续运作的肌肉
在重连的肌肉愈合后,团队对其进行了严格的测试。他们在反复的单次抽动和长时间连续收缩的条件下,将原生肌肉与新型执行器进行了比较。肌神经执行器的力下降要慢得多,在持续工作下疲劳耐受性提高了260%。它们随时间的表现与未改造肌肉有本质不同:力不是快速下降,而是更逐步地减弱然后趋于稳定。尽管在重连过程中肌肉有所失重,执行器仍保留了健康的纤维结构,单位质量产生的力与原生肌肉相当,并且即使在没有运动或额外刺激的情况下,其状态至少能够维持15周。
在不干扰大脑的情况下进行计算机控制
由于新的神经连线将肌肉与大脑的正常运动信号断开,所有收缩现在都来自外部的刺激器。研究者把肌肉嵌入一个反馈回路:传感器测量力,控制器调整神经刺激,系统在多个周期内追踪选定的目标力。在这一设置中,原生肌肉很快失效,但肌神经执行器能够持续跟随指令信号。为了使系统更安全、更灵活,团队还引入了一种可逆的“神经阻断”。通过在靠近脊髓的神经上施加高频电信号,他们阻止了刺激脉冲向中枢神经系统传回不想要的信号,同时仍允许肌肉侧响应。在实验中,当大脑被有效隔离于人工刺激之外时,执行器仍能持续地产生受控的力。
从仿生肢体到帮助衰弱器官
为展示这种活体马达的潜在用途,作者在大鼠身上构建了两个演示系统。在第一个系统中,他们将执行器与另一块代表截肢残余肌肉的肌肉串联连接。通过收紧或放松这对肌肉,他们改变了残余肌肉的牵张,从而改变其感觉神经纤维的活动——本质上是调节肢体的位姿与力量感。这种“本体感受机械神经接口”未来可能为机器人肢体或虚拟化身提供自然感觉的反馈。在第二个系统中,他们将执行器缠绕在充满液体的小肠环上。当通过神经刺激驱动时,肌肉挤压并释放肠段,运动追踪显示器官随执行器同步运动。这暗示了未来设备有可能为诸如肠道、膀胱甚至心脏等虚弱器官提供机械支持。
这对未来医学可能意味着什么
总体而言,这项工作表明,通过精心改道神经,可以把人的自身肌肉变成一种耐疲劳、可由计算机驱动、仍表现得像原生组织且在需要时可与大脑电隔离的执行器。因为该方法依赖于与现有临床工具相似的外科技术和电极,它比完全合成的植入物或实验室培养组织更易于转化。如果类似的肌神经执行器能在人体中安全构建与控制,它们可能成为新型生物混合系统的核心,用于恢复肢体感觉、辅助衰竭器官,并在不使用传统机器的体积和刚性的情况下向身体提供精确的机械信号。
引用: Song, H., Herrera-Arcos, G., Friedman, G.N. et al. A myoneural actuator with engineered biophysics for implantable biohybrid systems. Nat Commun 17, 2584 (2026). https://doi.org/10.1038/s41467-026-70626-6
关键词: 生物混合执行器, 神经假体学, 肌肉疲劳, 神经再生, 器官支持