Clear Sky Science · zh
具有自我训练高强度肌肉的高速游动生物混合OstraBot
肌肉驱动机器人跃入水中
想象一下由实验室培养的活体肌肉驱动的小型游动机器,而非电动机。该研究展示了研究人员如何让工程化肌肉自我训练,成为更强大的“发动机”,并用其驱动一款鱼类小型机器人,使其游速超过任何先前由骨骼肌驱动的机器。此项工作暗示未来的软体机器人可能高效、可适应并部分具有生命特性。
为何生物混合肌肉重要
机器人通常依赖刚性电机或气动活塞。它们工作良好,但往往笨重、噪音大,且难以与生物体柔软、灵活的运动相匹配。相比之下,工程化肌肉以简单营养物为能量来源,具有一定的自我修复能力,并能随着使用而适应——类似我们锻炼后的身体。问题在于动力:实验室培养的骨骼肌,尤其是常用的C2C12细胞来源的肌肉,通常产生的力太小,难以使机器人快速移动或承载较大负载。过去的大多数装置爬行或慢速游动,原因正是它们的肌肉“发动机”过于薄弱。
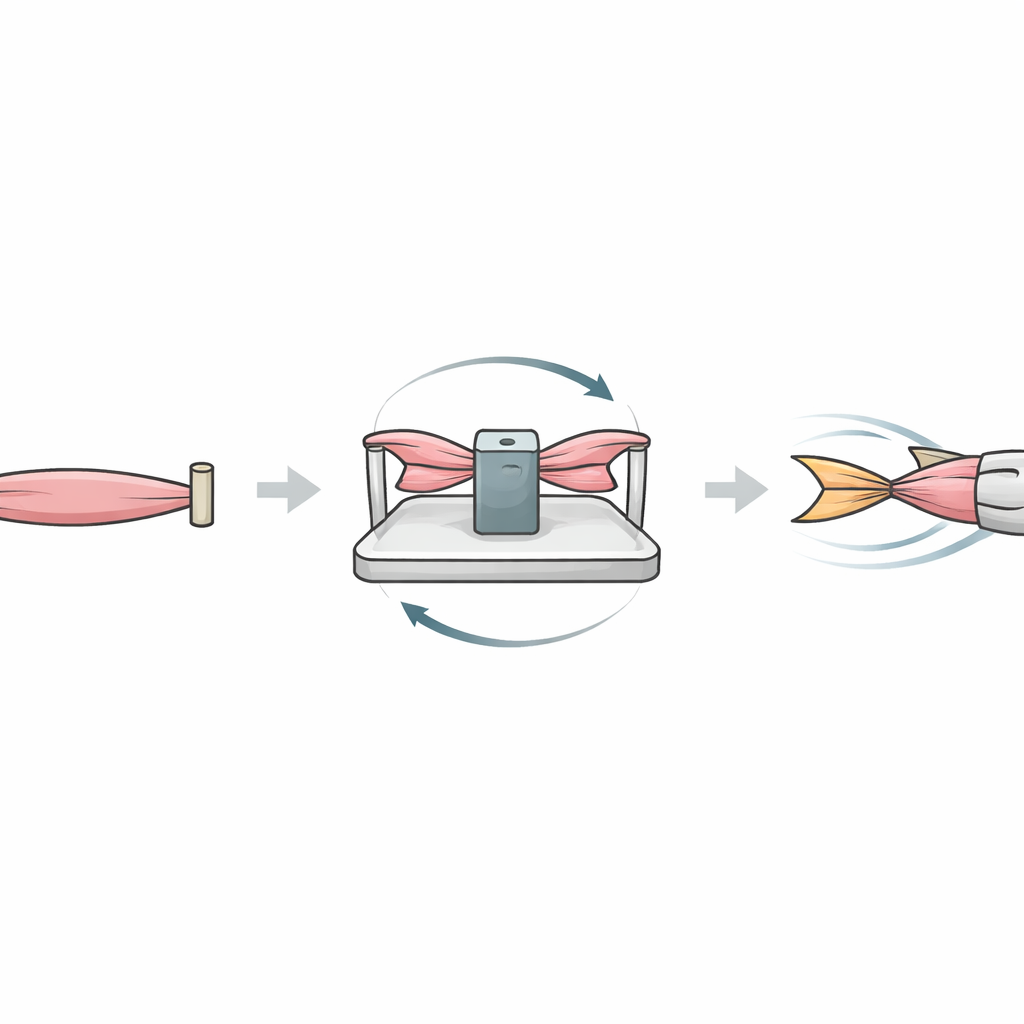
为活体组织搭建的自我训练健身房
研究人员通过为肌肉组织提供内建的锻炼机制解决了这一问题。他们将嵌入软凝胶中的C2C12细胞模塑成环形肌肉构筑体,然后将成对的肌环移至一个受臂力比赛启发的定制装置上。每个肌环一端固定,另一端连接到共用的滑动块上,因此当一条肌肉收缩时,会拉伸其伙伴,然后角色反转。关键在于,这些组织在早期发育阶段会自然地发生自主抽搐,即使不施加电刺激也会如此。该装置将这种自发抽搐转化为连续的往复训练循环,使两条肌肉在无人干预或外部机械的情况下成千上万次地伸长和缩短。
打造更强、更耐用的肌肉“发动机”
为验证这种自我训练是否重要,团队对比了三种成熟肌肉的方法:允许运动但阻力很小的非常软支撑、能保持长度但几乎不移动的非常硬支撑,以及他们的成对自我训练平台。在显微镜下,自我训练的肌肉发展出更粗、更整齐排列的纤维,并呈现与成熟肌肉相关的清晰内带纹理。力学测量证实了视觉差异:自我训练组织产生约七毫牛顿的力——比在传统平台上生长的肌肉高出数倍,也是该细胞类型在机器人体内报道的最高值。它们还在数周内保持强劲收缩,表明锻炼不仅让组织增大,还帮助其在时间上保持功能。
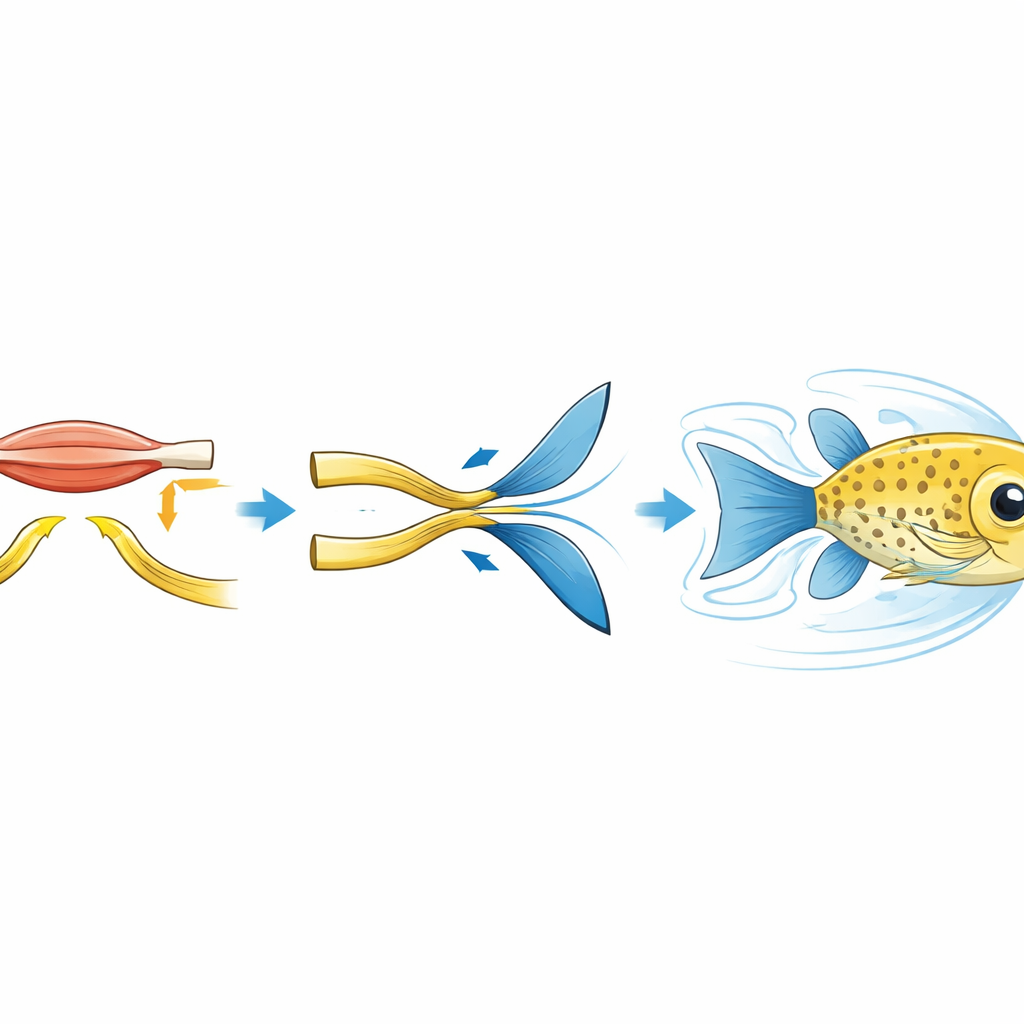
设计一款快速的箱鲀风格游泳器
拥有更强肌肉后,研究人员着手构建一款称为OstraBot的小型游泳机器人,基于箱鲀式的运动风格。在这种游动模式中,机体大体保持刚性,而推进则来自侧面或尾部来回摆动的尾鳍。OstraBot的机身是轻质3D打印浮体,“肌腱”为传递力的柔性梁,双尾充当桨。当肌肉条在电刺激下收缩时,它弯曲肌腱,肌腱进而摆动尾部并将水向后推。为了最大限度发挥活体发动机的性能,团队构建了一个数学模型,将肌肉收缩与机器人运动联系起来。通过把肌腱视为弹簧、将周围水看作阻尼力,并包含生物学上现实的肌肉行为,他们能够预测哪种肌腱刚度与刺激频率组合会产生最大机械功,从而实现最快的游速。
为速度与控制调节最佳状态
模型揭示了一个“金发姑娘”区域:过硬的肌腱几乎不弯曲,浪费了肌肉的力量;过软的肌腱则虽大幅弯曲,但无法有效对抗水阻。中等刚度配合适中的拍频,使肌肉在每个循环中完成最大有用功。实验验证了这些预测。具有中等刚度肌腱的机器人游速远快于软或硬肌腱的机器人,达到约每分钟467毫米,或每分钟超过十五个体长——这是由骨骼肌驱动的生物混合游泳器的纪录。团队还可通过调整刺激频率或电场强度来进一步调节速度,并演示了使用声触发电路实现拍手控制的启动与停止行为。当被扰动或向后推动时,该机器人凭借强劲的肌肉推力和良好匹配的机械结构迅速恢复并继续向前运动。
这对未来活体机器意味着什么
对于非专业读者,关键信息是:活体肌肉现在可以通过训练和工程化达到可与许多合成软致动器相抗衡甚至超越的强度与响应性。通过让组织通过巧妙的机械装置自我锻炼,并用现实的模型指导机器人的设计,研究人员克服了生物混合机器人领域的一项重大性能瓶颈。他们的方法可扩展到其他细胞类型、更大的系统和更复杂的机器,为朝向高效、可适应且深受真实动物运动启发的软体机器人铺平道路。
引用: Chen, P., Wang, X., Zhou, J. et al. Fast-swimming biohybrid OstraBot with self-trained high-strength muscles. Nat Commun 17, 2246 (2026). https://doi.org/10.1038/s41467-026-70259-9
关键词: 生物混合机器人, 工程化肌肉, 软体机器人, 游动微型机器人, 组织工程