Clear Sky Science · zh
由弛豫型铁电聚合物纳米复合材料制成的仿生致动器
像真实昆虫一样运动的小型机器人
想象一个毛毛虫大小的机器人能够在崎岖地形上爬行,或是一种蝴蝶般的装置拍动翅膀并离地起飞——但它仅由一片薄如纸的塑料构成,且耗电比夜灯还少。本文描述了一种新型柔性材料,能充当仿生肌肉,使此类昆虫级机器人比以往更简单、更轻、更节能。
为什么小型、柔软的机器很重要
受昆虫启发的微型机器人能够潜入倒塌建筑物寻找幸存者、在管道中穿行以检查基础设施,或悄然监测农作物与森林。要在这些狭窄且不可预测的环境中工作,它们必须体积小、柔韧且坚韧,同时消耗极少的能量。许多现有设计依赖复杂的齿轮、铰链和多种材料的组装,这会增加重量、浪费能量并难以进一步微型化。作者认为,理想的解决方案是一种既能产生运动又能直接传递运动的单一材料,就像动物的真实肌肉那样。
从内到外设计的智能塑料
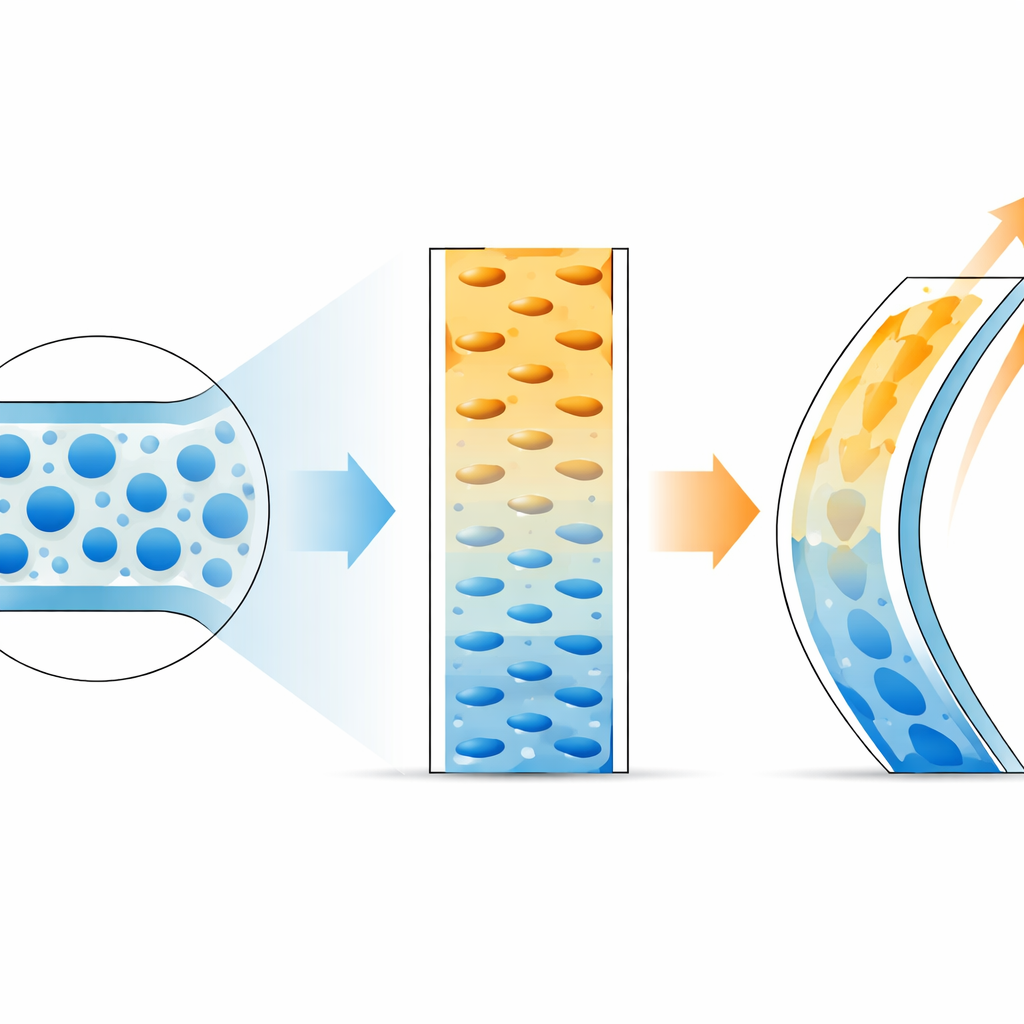
这项工作的核心是一种基于著名材料家族PVDF的薄塑料膜,这类材料因在电场作用下能够发生形变而备受重视。研究人员将这种塑料与微小的“聚合物点”混合——这些纳米级颗粒表面覆盖可形成氢键的化学基团。将混合物铸成薄膜并在受控条件下轻微加热时,溶剂自上而下挥发的速度不同。这种不均匀干燥与氢键作用相结合,使靠近底面处的聚合物链排列成高度有序且具极性的构型,而顶部则保持较无序。结果是在单层厚度方向上产生了内在的梯度结构。
从隐含结构到强劲运动
这种微妙的结构梯度带来了显著的力学回报。当在薄膜上施加电场时,较有序、极性更强的底部区域的响应大于顶部,因此薄片的一侧比另一侧膨胀得更多。这种不平衡使整条薄膜弯曲,类似恒温器中经典的双金属片,但这里发生在仅几十微米厚的全有机、柔性薄膜中。精确测量表明,该薄膜的长度可变化约14%,并能储存接近硬陶瓷致动器的机械能量密度——同时仍保持柔软与轻量。与未添加聚合物点或未经梯度处理的同类薄膜相比,新材料产生的应变高出数倍,并能更高效地将电能转化为机械运动。
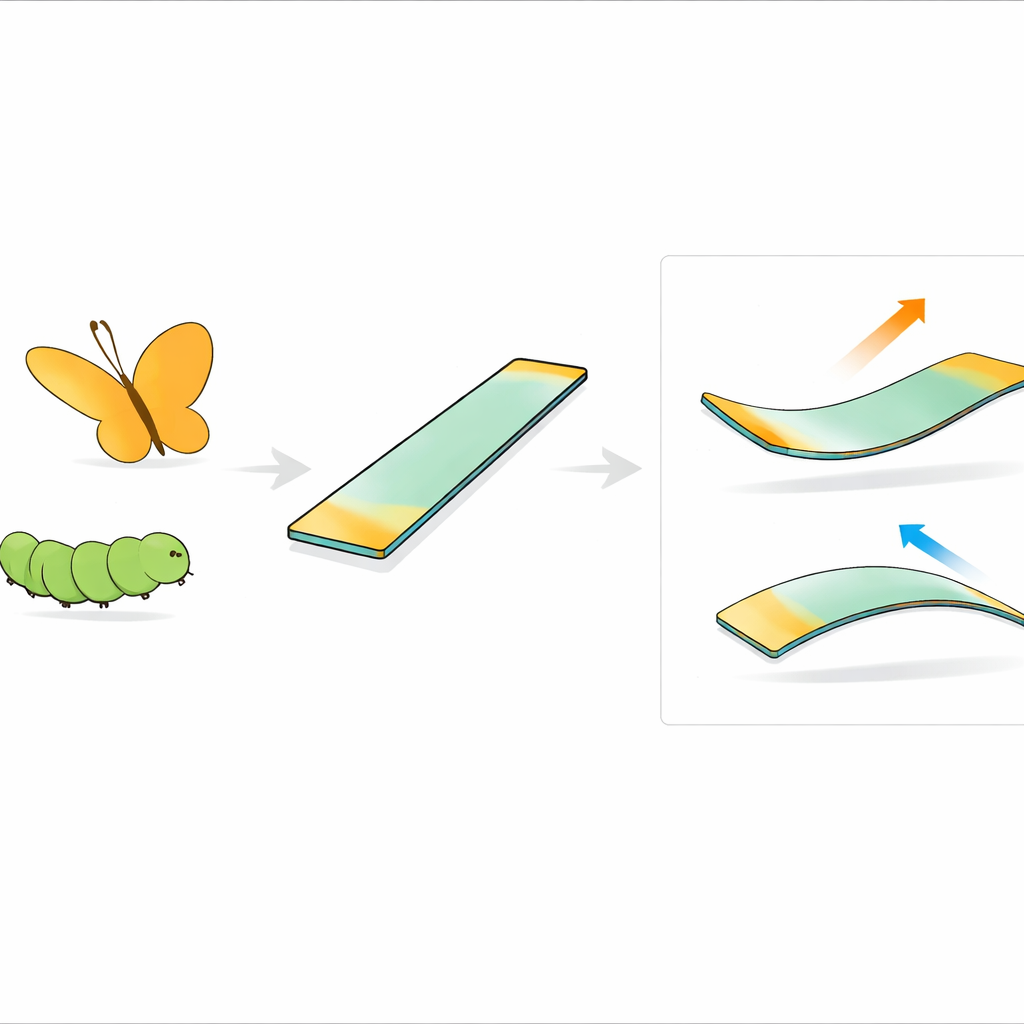
制作会爬行的毛毛虫和会飞的蝴蝶
为展示该材料的实际效果,团队将薄膜切成昆虫状并添加简单的碳基电极与薄铜支撑。一种设计类似小毛毛虫,中部更宽,两端渐细;当施加交变电场时,条带以节律性模式弯曲并在带有脊槽的轨道上以每秒数个体长的速度爬行,仅消耗几毫瓦的功率。第二种设计模仿蝴蝶,具有主动的中心区域和柔性的翅膀。在类似的电信号驱动下,翅膀快速拍动并能使装置离开平台几毫米,甚至能承载高达自身重量二十倍的负载——而总致动器质量约为50毫克。
对未来微小机器人的意义
这项研究表明,通过精心设计塑料材料在厚度方向上的组织方式,可以制造出单层超薄片,在电场下产生强烈弯曲并驱动复杂、仿生的运动。尽管当前器件仍需相对较高的电压,其极低的能耗和羽量化结构使其成为未来昆虫级机器人和智能设备的有前景构件。若进一步改进以降低工作电压,类似薄膜或许有朝一日能让成列的微型自治机器以仅如发丝般厚的仿生肌肉实现爬行、拍动与探索世界。
引用: Chi, H., Bai, P., Zhou, Z. et al. Biomimetic actuator crafted from a relaxor ferroelectric polymer nanocomposite. Nat Commun 17, 2155 (2026). https://doi.org/10.1038/s41467-026-70165-0
关键词: 软体机器人, 仿生肌肉, 聚合物致动器, 昆虫级机器人, 电活性材料