Clear Sky Science · zh
一种自供能水凝胶电子皮肤,具解耦多模态感知以实现闭环人机交互
日常生活中的智能第二层皮肤
想象一条柔软、可拉伸的腕带,佩戴起来像一层皮肤,同时悄然监测你的体温、脉搏和汗液,还能让你控制机器人并感知它触碰到的物体。本文报道了正是这样一种由富水凝胶制成的“电子皮肤”。它能从人体的热量和运动中自供能,同时同时监听多种身体信号,并借助人工智能将这些信号解耦,打开了人与机器之间更自然连接的可能性。
把软凝胶变成可感知的皮肤
系统的核心是一整块聚乙烯醇水凝胶,这种凝胶含水量超过80%,其软度接近真实皮肤。研究人员采用谨慎的三步置换溶剂工艺,使该凝胶兼具强度与柔韧性。首先,通过对聚合物溶液反复冷冻和解冻形成初始凝胶。然后用甘油替换原有液体,以使聚合物链更紧密、增强材料韧性。最后置换为含铁离子的盐水溶液,这一步稍微放松了网络结构,使材料刚度降至人体组织的范围,同时保持凝胶的高韧性和可拉伸性。显微镜观察、热学测试和X射线测量都证实,凝胶保留了许多微小的类晶体区域以提供强度,而整体结构仍保持柔软和弹性。
一种材料,三类触觉
要像皮肤一样工作,水凝胶必须在不依赖笨重多层独立传感器的情况下感知不同类型的刺激。团队在材料组成和形状上做了设计,使三种基于离子的效应在同一块凝胶中同时发生且互不干扰。体表与空气之间的温差通过铁离子的可逆反应驱动微小但稳定的电流,将热能转换为电能。当凝胶受压或拉伸时,正负离子的迁移速度不同,会短暂打破电荷平衡,产生由压力驱动的电流。与此同时,汗液中的盐分会通过特别处理的亲水通道迁入凝胶,盐浓度差产生另一种可测电流。由于这些过程在时间尺度和方向上各不相同,来自热、压力和盐分的信号能够并存并被区分开来。
为更强信号塑形凝胶
研究人员发现,将水凝胶刻成一片片微小棱柱构成的“森林”可以显著提高其灵敏度,尤其对压力敏感。在这种设计中,尖细的顶端将机械应力集中到凝胶与皮肤接触的部位,使离子沿受力方向极化,从而将电流放大超过单块凝胶的百倍。相同结构仍能传导热量并允许离子扩散,因此三种感测模式可以同时工作。测试显示,该电子皮肤可拉伸到原长的八倍以上,能检测非常轻微的压力,并能从腕部分辨出用于血压分析的脉搏波形各个峰值。 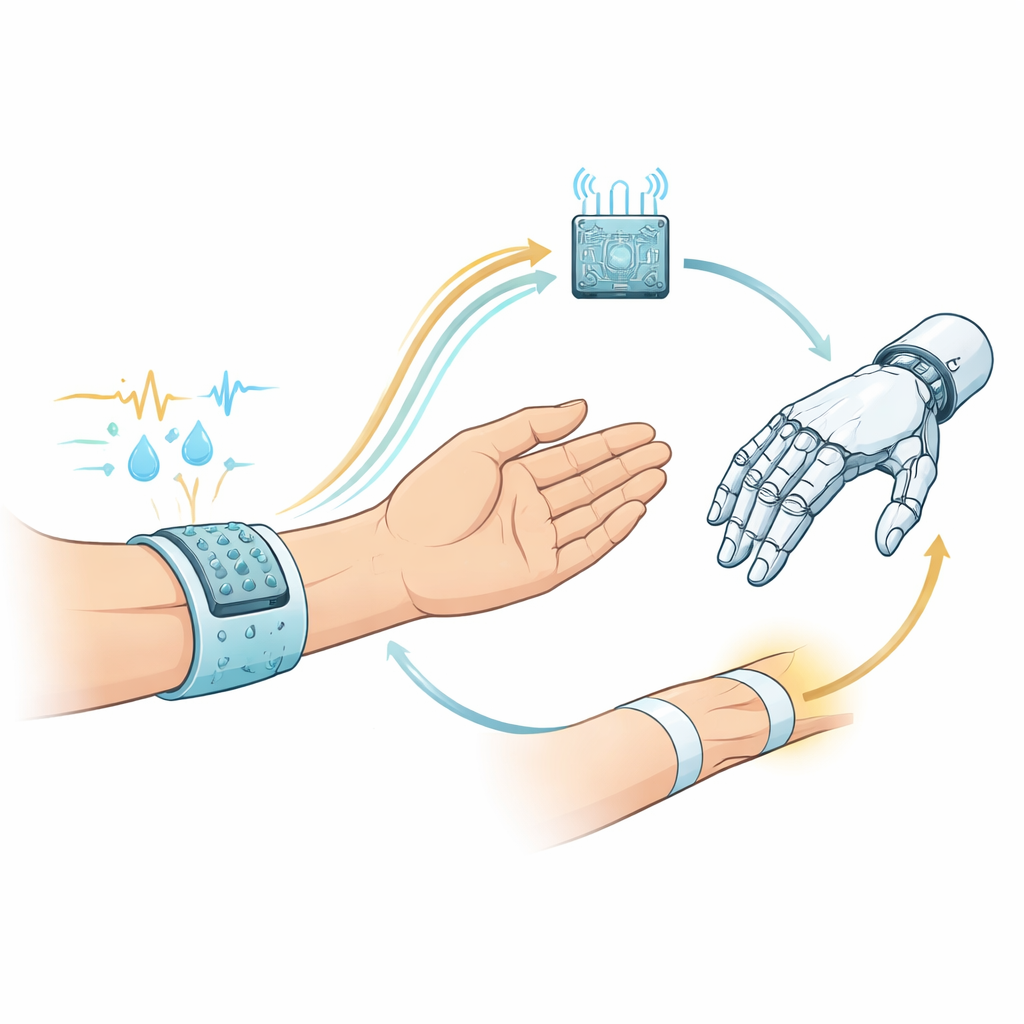
从信号到智能腕带
基于该材料,作者将水凝胶传感器阵列与柔性电路、信号再现单元和无线通信结合,构建了一款主动式多模态信号发生腕带。难点在于三种感测模式会产生互相重叠的电流。为了实时分离这些信号,团队训练了基于长短期记忆网络并带注意力机制的机器学习模型。该算法学习电流随时间的演变,并将其部分归因于温度、压力或汗液。在模拟日常状态——静息、行走、跑步、睡眠和发热——的测试中,解码后读数与商业温度计、心率监测器和汗液分析仪的结果高度吻合。同一腕带还能捕捉手势时前臂肌肉产生的细微压力变化,并借助深度学习分类器将这些变化翻译为高精度的机器人手臂控制指令。 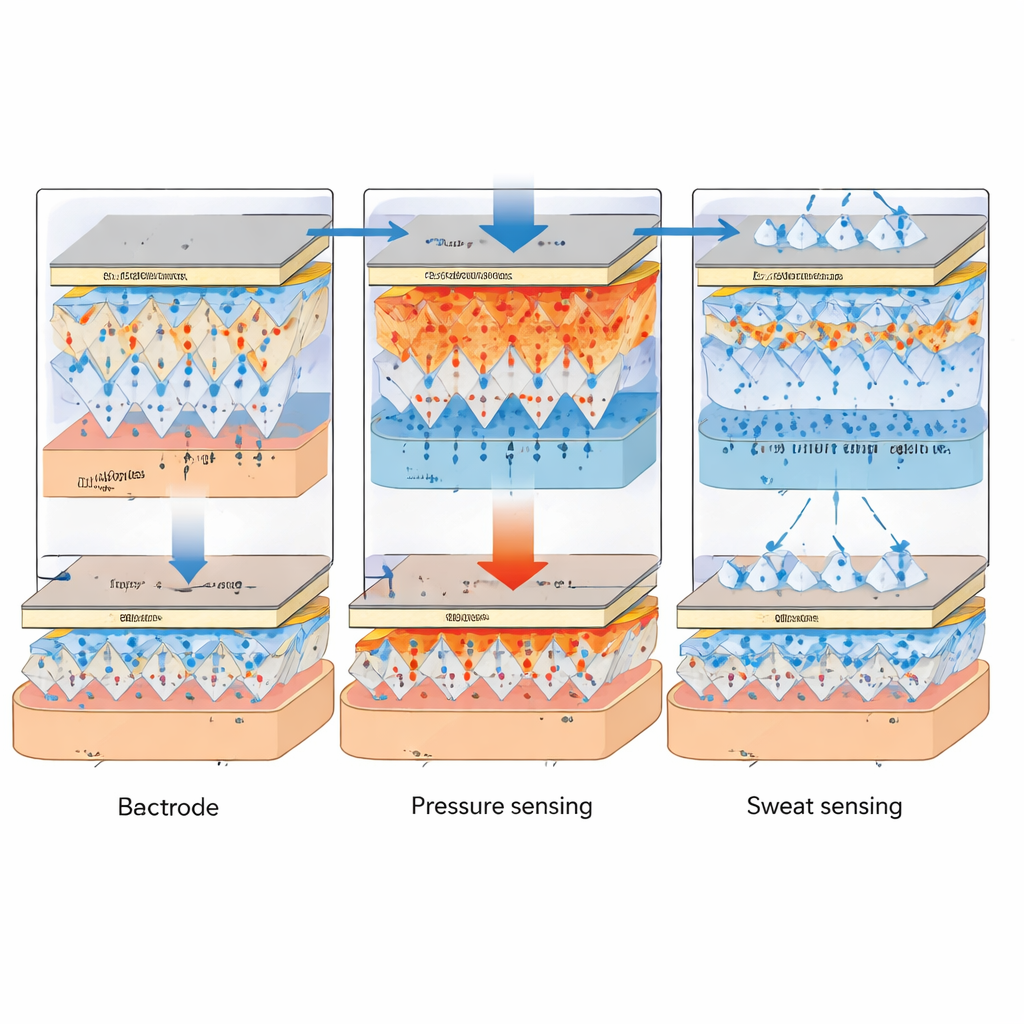
通过机器人的触觉去感受
该系统超越了单向控制,构成了感知闭环。当另一块相同的水凝胶电子皮肤覆盖在机器人手部时,它会在机器人操作物体时感测温度和握持力。这些信号被发送回用户的腕带,驱动小型加热器和振动电机。由此,用户可以感受到与机器人体验相对应的温暖、寒冷和压力,即便远在天边。内置的软件安全功能可以警示过热或过冷的表面,并防止机器人压碎易碎物品。对非专业读者而言,关键在于:一种类似皮肤的单一材料现在能够收集身体能量、同时读取多项生命信号,并支持与机器的双向触觉通信,这为未来更自然、更逼真的假肢、软体机器人和虚拟世界铺平了道路。
引用: Bai, C., Dong, X., Liu, Q. et al. A self-powered hydrogel electronic skin with decoupled multimodal sensing for closed-loop human-machine interactions. Nat Commun 17, 2675 (2026). https://doi.org/10.1038/s41467-026-69450-9
关键词: 电子皮肤, 水凝胶传感器, 可穿戴健康监测, 人机界面, 触觉反馈