Clear Sky Science · zh
本体感受极限探测器有助于果蝇腿的感觉运动控制
苍蝇如何确保步伐稳妥
每次腿向前摆动时,都有过度伸展和绊倒的风险。从家猫到果蝇,动物依赖隐藏的感受器官向神经系统报告关节何时接近极限。本研究揭示了果蝇前腿中的微小传感器如何作为内置的“停止保护器”,帮助动物转移体重、避免碰撞并保持稳定姿势——即便在快速行走或整理毛发时亦然。
运动边缘的隐蔽传感器
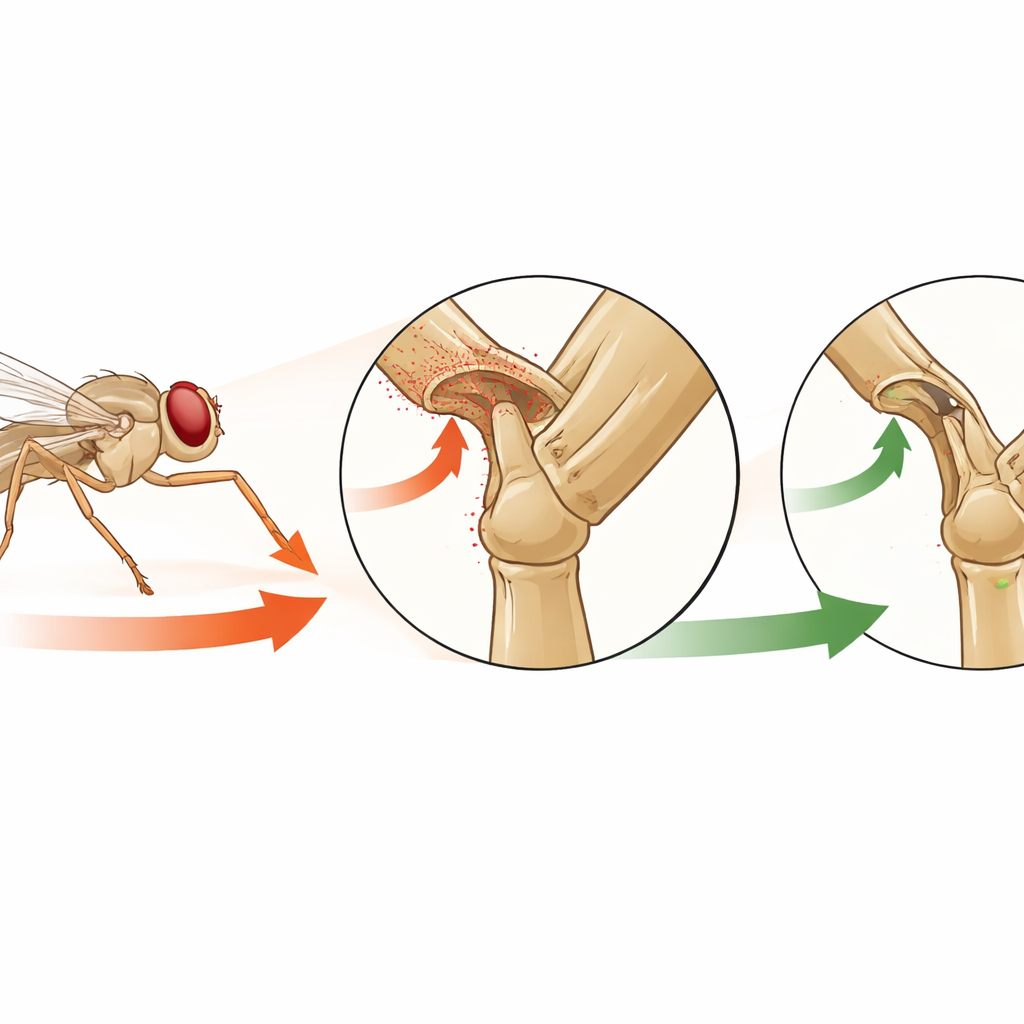
作者聚焦于一种位于蝇腿上的类触觉传感器——毛板。这些是在腿关节褶皱处的一小簇僵硬毛毛,布局使其仅在关节被推向正常活动范围的边缘时弯曲。借助高分辨率成像和遗传工具,团队绘制了蝇腿上所有此类毛板的分布,并进一步放大研究了前腿上的一组特定毛板,命名为 CxHP8。他们的目标是弄清这些传感器检测的是关节的哪些角度、它们在神经系统中的连线方式,以及在自然行为中它们实际的功能。
在移动腿时观察神经活动
为了查看 CxHP8 何时被激活,研究者使用双光子显微镜测量其神经纤维内的钙信号,这是一种常用的活动追踪方法。与此同时,他们精确控制并追踪前腿在三维空间中的位置。当他们缓慢移动腿时,发现当上腿节向内旋转并向身体方向平移时,CxHP8 的放电最强——这些位置对应前腿向前并靠近中线的极限。当腿保持在这些极端位置时,活动保持在高位而非短暂脉冲,表明这些传感器持续发出关节到达极限的信号。在诸如在小球上行走和整理毛发等自然行为中,也会达到相同角度,且每当腿摆到这些极端位置时 CxHP8 都保持活跃。
追踪从传感器到肌肉的连线
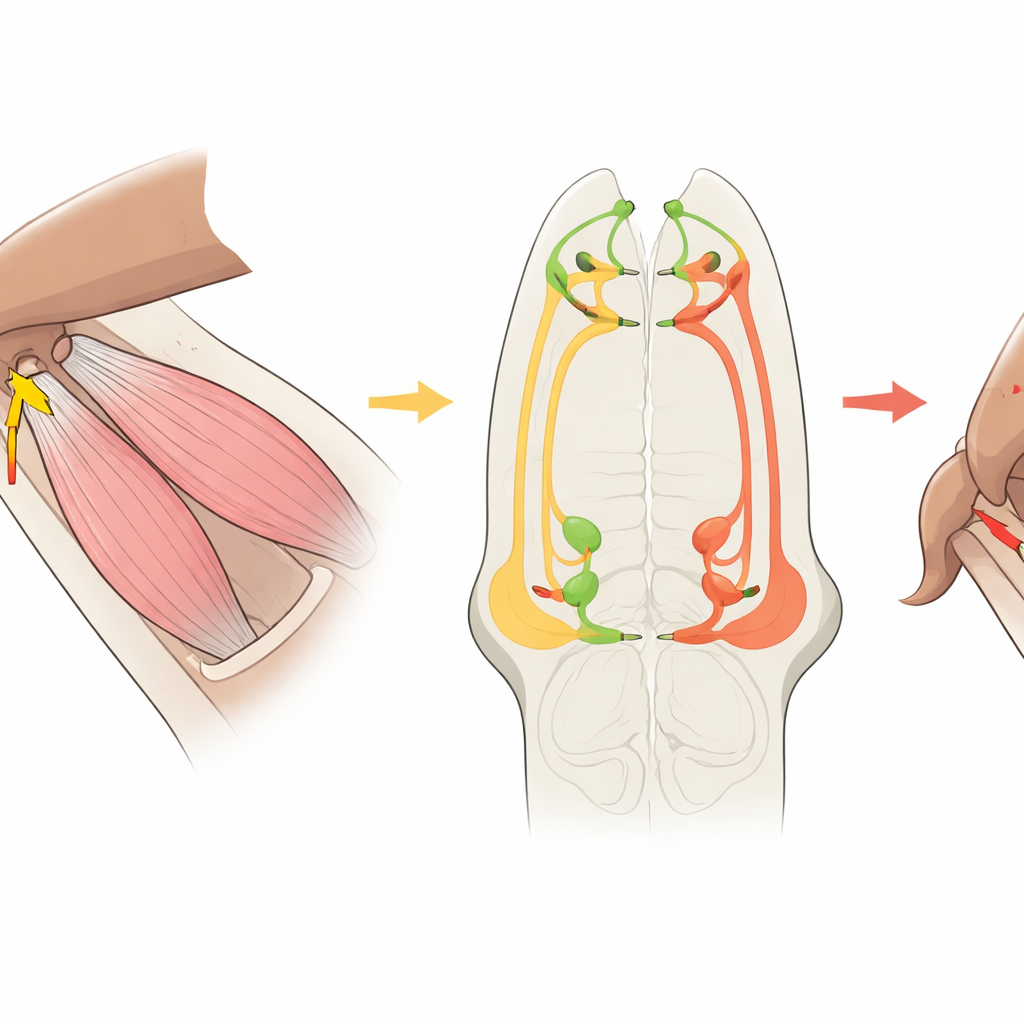
接着团队利用成千上万个神经元的电子显微图像重建的详细连线图(腹侧神经索)进行研究。他们追踪了从腿进入神经系统的 CxHP8 纤维并识别出其所有连接。CxHP8 的多数输出直接或间接连接到腿的运动神经元,尤其是那些使腿向后拉的运动神经元,以及较小一组推动腿向前的运动神经元。在这个回路中,CxHP8 强烈兴奋使腿向后移动的运动神经元,并通过抑制性中间细胞抑制驱动向前运动的运动神经元。这一布局提示了一个简单规则:当腿到达向前的极限并且 CxHP8 放电时,回路应将腿从向前摆动相切换为向后承重相。
在真实行为中强制或移除信号的影响
为了检验该预测,作者在行为中的苍蝇身上使用光敏蛋白来激活或沉默 CxHP8。当他们对经过基因改造以可激活 CxHP8 的束缚苍蝇的关节闪光红光时,被刺激的腿迅速向后移动、向外旋转并屈曲,对其他腿影响很小。相反,当他们用光门控通道短暂或用钾通道长期沉默 CxHP8 时,前腿在行走期间往往会超过通常的向前伸展。在浮动小球和电动跑步机上,步伐结束时脚落在稍微更向前且更靠近中线的位置,摆动相的行程更长,尽管步伐的时序和腿间协调在很大程度上保持完整。在静止时,CxHP8 被沉默的苍蝇也会把腿分得更开,形成更宽的支撑基底。
许多小型传感器,各司其职
在确认了一个毛板的功能后,研究者利用同一连线图预测了邻近关节上其他毛板的作用。他们重建了这些毛板的神经纤维并统计了它们对不同运动神经元群的突触数量。此分析表明,每个毛板都调谐于特定方向的关节极限——有些偏好前向,有些偏好后向,而有些则在两者之间起稳定作用——通过优先连接控制相关腿节运动的肌肉。实际上,蝇腿周围布满了小而专门化的极限探测器,每一个都预先连线以将腿从它所监测的特定极端位置推开。
这项研究为何对运动学重要
这项工作展示了微小昆虫腿如何成为理解所有动物关节极限感知的模型。对非专业读者来说,关键概念是:神经系统不仅跟踪肢体移动的速度或距离;它还拥有专门的“绊线”,当关节过于接近边缘时触发。在果蝇中,一个这样的绊线 CxHP8 会持续发出信号,表明前腿过度向前摆动,并通过一个简单但明确的回路触发向后承重步的转换,帮助设定稳定的静止姿势。由于连线图现已详尽可得,这项研究还表明,至少在这个小型神经系统中,可以直接从传感器与肌肉之间连接的布局预测具体反射——例如腿何时会从摆动转入支撑相。
引用: Pratt, B.G., Dallmann, C.J., Chou, G.M. et al. Proprioceptive limit detectors contribute to sensorimotor control of the Drosophila leg. Nat Commun 17, 2664 (2026). https://doi.org/10.1038/s41467-026-69333-z
关键词: 本体感受, 果蝇, 行走, 感觉运动回路, 毛板神经元