Clear Sky Science · zh
受猫头鹰视觉启发的近传感器计算
像猫头鹰一样在黑暗中看见
想象一架无人机能够在没有探照灯的情况下发现失踪的远足者或遥远的航天器,甚至在仅有微弱星光的条件下,普通相机几乎什么也看不见。本文描述了一种受猫头鹰启发的新型视觉硬件,把这一构想推得更近。通过模拟猫头鹰眼睛如何适应黑暗以及其大脑如何高效处理微弱信号,研究人员构建了一个微小的电子“突触”,它既感测微弱光线又在传感器上直接执行部分识别所需的计算。
为何现有机器在夜间表现欠佳
现代人工智能能以令人印象深刻的精度识别面孔、物体和场景,但通常需要耗能巨大的强大芯片来完成。传统相机也把感测和计算分离:先由相机捕捉图像,然后由远端处理器处理数据。在极弱光下,这些相机通常会失败,除非借助强光灯或大量的数字增强。相比之下,猫头鹰的眼睛和大脑协同工作:其视网膜随时间积累微弱的光子流,其神经回路会调整,使得暗淡的形状逐渐显现。作者旨在将这种紧密集成且节能的策略带入机器视觉。

一个从光中学习的小器件
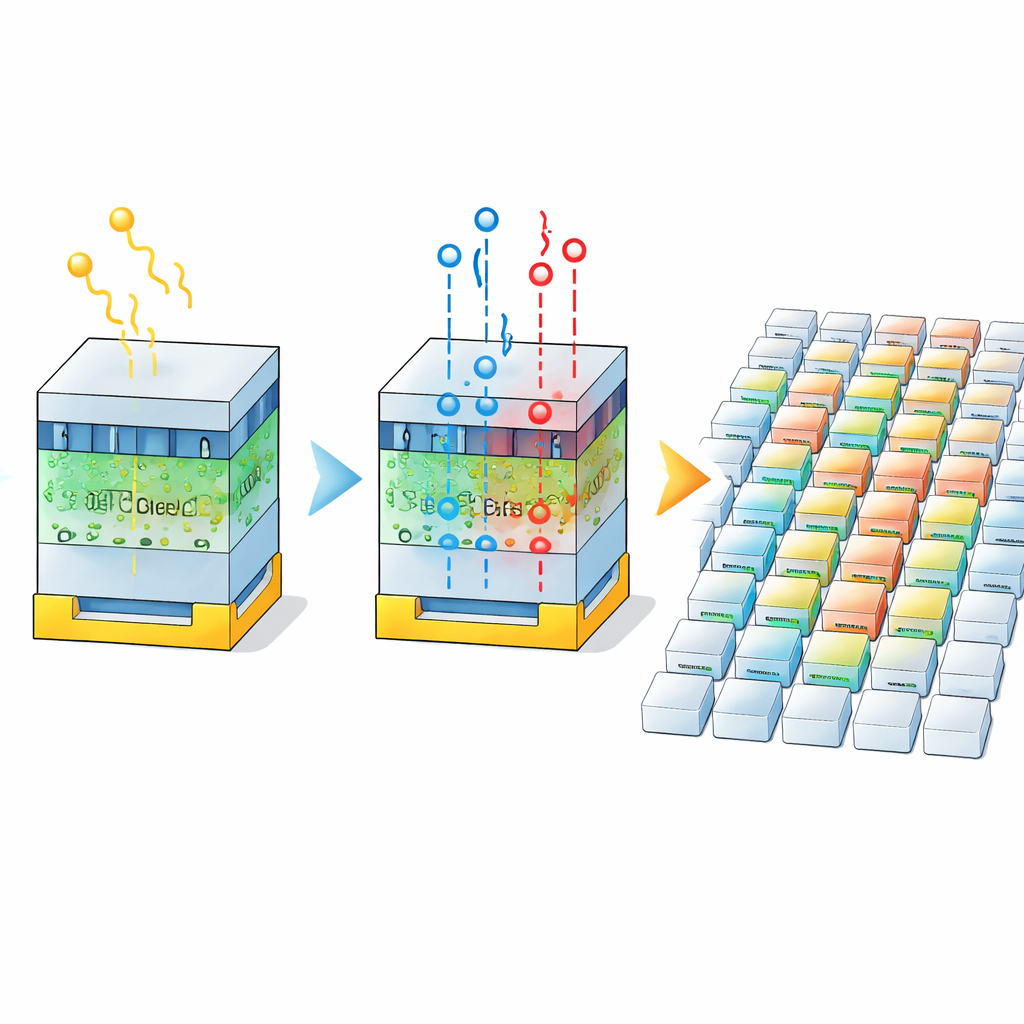
工作的核心是一个“受猫头鹰启发的双模自适应突触”——一种基于晶体管的小型器件,既像光传感器又像神经元之间的可学习连接。该器件由多层构成:透明底电极、可俘获电荷的介电薄膜、经过特殊设计的吸光混合物以及顶部的有机半导体通道。当微弱光线照射吸收层时,会产生少量载流子,在施加电压的引导下被俘获在介电层并在通道中累积。这会逐渐增强器件的电学响应,类似猫头鹰视网膜中的杆状细胞在适应黑暗时变得更敏感。作者表明,该器件能响应低至0.146纳瓦每平方厘米的光强——约比标准相机芯片能处理的弱三个数量级——同时表现出强且可调的增益,用以量化其暗适应能力。
作为人工突触的表现
除了感测光之外,该器件还模拟了生物突触随活动而增强或减弱的机制。在从紫外到近红外的宽波段重复光脉冲下,器件的电流以持久的阶跃式增长,存储了光学历史的记忆。在施加到栅极的电脉冲下,它表现出长期增强和抑制——导电性逐步且可逆的变化,将突触“权重”编码到人工神经网络中。这些权重以非易失方式存储,意味着器件在不持续供电的情况下也能保持记忆,且可以像多比特数字值一样在多个级别上调节。至关重要的是,每次突触事件的能量消耗量级约为10飞焦耳,可与生物突触的估算值相当或更低,并远低于典型人工智能硬件的能量预算。
从单个突触到视觉系统
为验证这种行为在大规模下仍然成立,团队制造了一个19×17的器件阵列并证明它们工作一致。当微弱的光图样投射到阵列上时,受光照射位置的光电流在适应过程中逐渐增长,在超低照度下显露出先前隐藏的形状,类似猫头鹰视网膜在黑暗中锐化图像的过程。作者随后将器件的多级电导水平映射到机器学习模型中的权重,包括简单的多层感知机、卷积网络以及深度的VGG风格架构。即便使用相对粗糙、离散的权重,这些模拟网络在标准图像数据集上仍然能达到90%以上的准确率,表明这些突触状态足以支持实际计算。
为无人机及更多场景提供夜视能力
为说明实际应用潜力,研究者模拟了一个安装在小型无人机上的空对地识别系统,训练其在对应星光条件的不同亮度下检测类似衣物形状的目标。通过将器件的时变响应与捕获图像的对比度联系起来,他们构建了一个“适应”图像的预处理阶段,在保持现实传感器行为范围的同时提升有用对比度。一个流行的目标检测网络(YOLOv5)在这种适配数据上训练后,即使在最低测试光照下也能达到95%以上的识别准确率。简而言之,这项工作显示,通过将猫头鹰式的暗适应与内置的突触学习直接结合到传感器上,有可能将机器视觉推进到传统相机无法胜任的条件下,同时使用更少的能量。这类技术未来可为搜救无人机、自主探测器或在更少照明下观察更多天体的天文仪器提供支撑。
引用: Zhao, Z., Cao, Y., Huang, S. et al. Owl-vision-inspired near sensor computing. Nat Commun 17, 2676 (2026). https://doi.org/10.1038/s41467-026-69123-7
关键词: 弱光视觉, 类神经形态传感器, 受猫头鹰启发的成像, 近传感器计算, 夜间目标检测