Clear Sky Science · zh
用于空中抓取与交互的类手自主飞行机器人
几乎可以与之握手的飞行助手
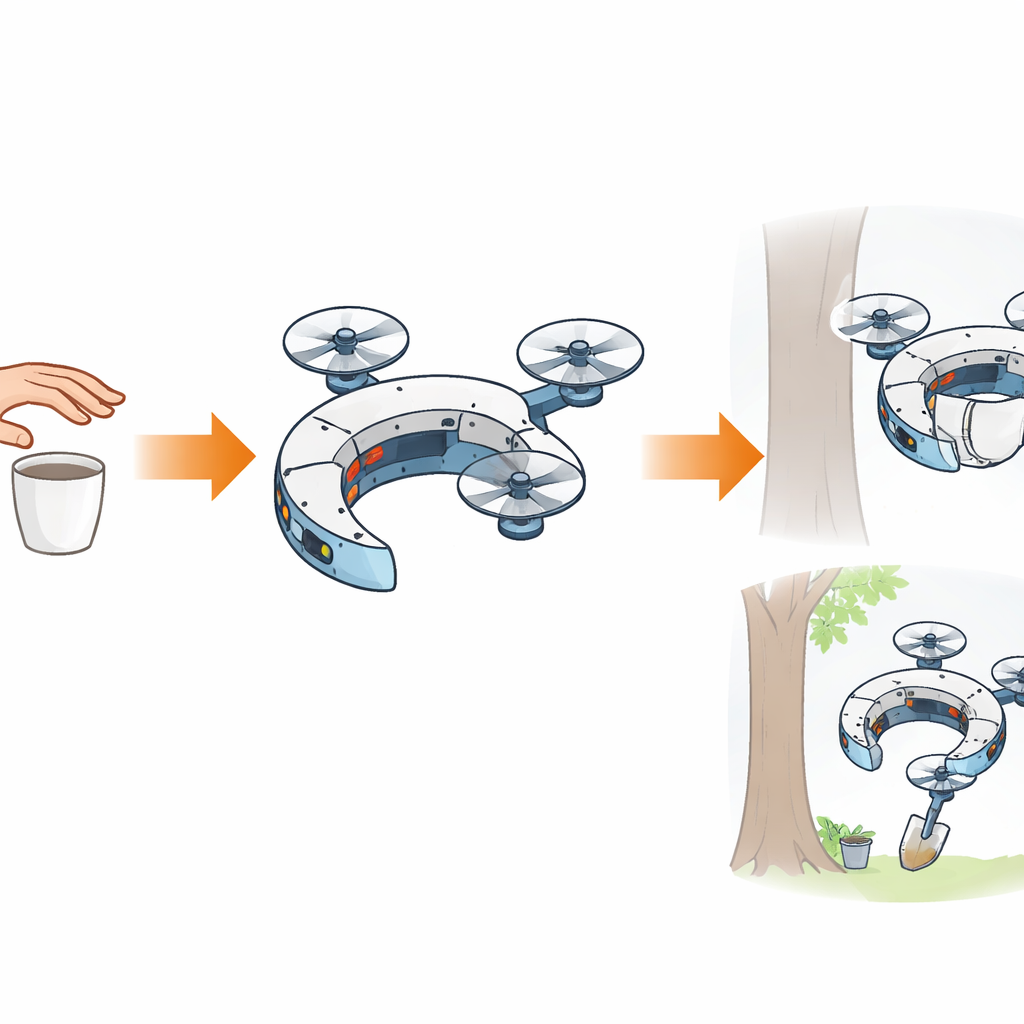
想象一台小型飞行机器人,它不仅能拍摄周围环境,还能开门、递给你一杯饮料,或从难以触及的货架上取下包裹。本研究正是介绍了这种设备:一种紧凑的无人机,其机身同时具备手的功能。通过融合鸟类飞行与人类握持的理念,研究团队展示了空中机器人如何从被动观察者转变为家庭、工厂以及搜救场景中的主动助手。
从飞行摄像头到飞行之手
如今多数无人机是充当“飞行之眼”,用于摄影、测绘或检测。当工程师试图为无人机增加机械臂以便抓取或推动物体时,机器很快会变得笨重、沉重、耗能且难以控制——尤其是在室内或有人附近时。作者通过重新构思无人机的机身来解决这个问题。他们没有额外安装独立的机械臂,而是将整个机架设计为能围绕物体包裹、停在电线杆或树枝上,并仍能灵巧穿越狭窄空间的“手”。
手形飞行机体
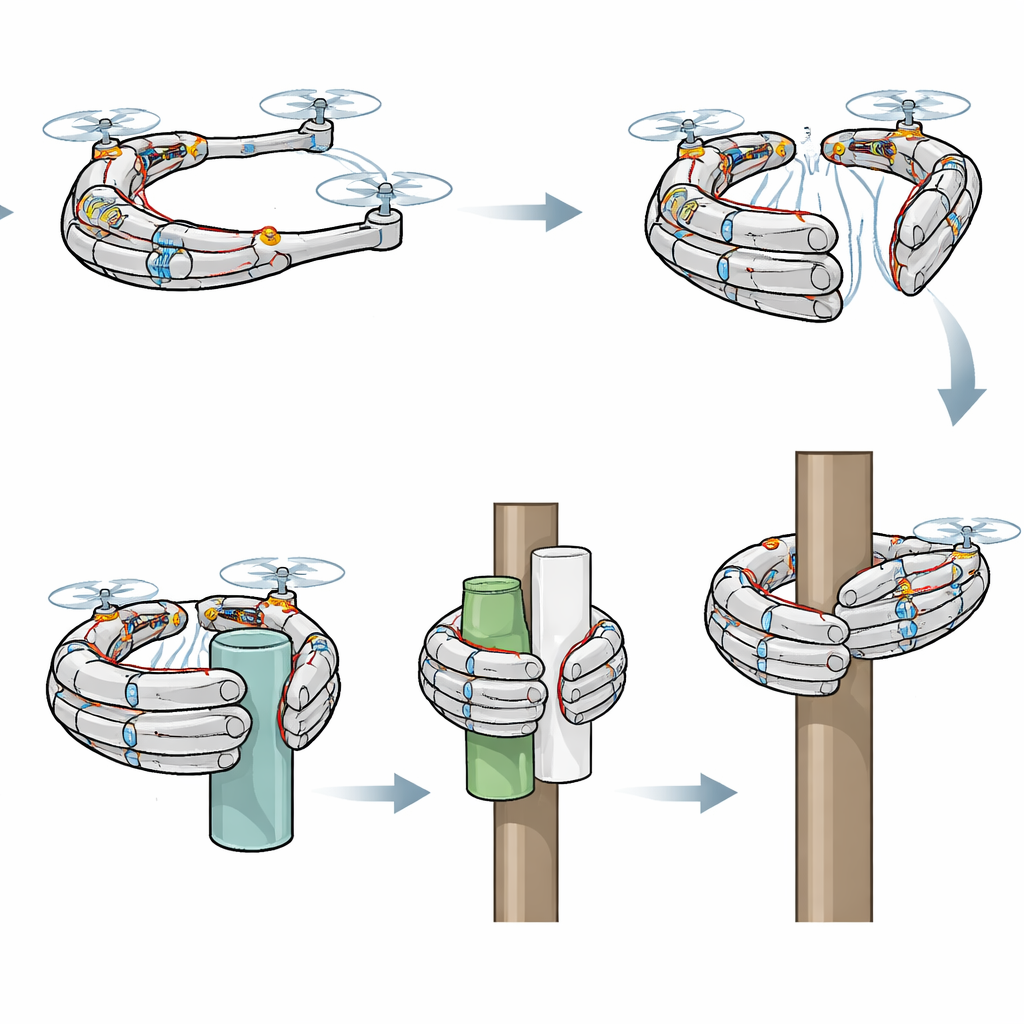
这款新机器人名为 HI‑ARM,体积与重量接近成年人的一只手。其机架形成一个开放的 C 形,类似弯曲的掌心与手指。环形内部包含伸缩段与可扭转关节,不是由多个电机驱动,而是一根类似腱索的线通过一个舵机牵引。弹簧使结构能够弯曲后又弹回原状,像肌肉与肌腱一样储存与释放能量。这种欠驱动设计允许机器人围绕未知物体自适应:随着腱索收紧,不同部位依次压缩与扭转,直至自然贴合被抓取的对象。
机器人如何“思考”与飞行
为了让可变形机体发挥作用,团队为机器人构建了分层“脑”。一部分规划无人机的飞行路径以及何时执行抓取、放置或停栖,从一套基本动作库中调用如“抓取”、“释放”或“停栖于杆上”等动作。另一部分将这些计划实时转换为空间中的平滑轨迹,供无人机跟随。快速的控制系统则持续估计机器人的位置、随形变而移动的重心位置,以及抓取或推动物体时产生的额外力。自适应算法感知这些扰动并自动提升或重新平衡四个螺旋桨的推力,使得在机体挤压一个瓶子或推动一扇门时飞行仍然保持稳定。
这只飞行之手能做什么
在室内测试中,HI‑ARM 能执行类似人类的常见动作。它用“掌心”抓住并沿精确飞行路径运送一整瓶水,用“指尖”捏起并提起一张薄纸巾——这对机器而言是个尤其精细的任务。相同的机构能够在不预先知道形状的情况下适应玩具、盒子、袋子和形状奇特的积木。机器人可以飞到树干或杆子旁,夹住它们,关掉螺旋桨并悬挂在那里,所需能量远低于悬停状态。它还可以接近门,把手柄包裹起来,在保持平衡的同时推开门,应对回推力。
帮助人们并在户外工作
研究者还探讨了此类装置如何与人互动。在类似家庭的场景中,无人机从人手中接过包裹、将其收起、从桌上取来一杯饮料并递交,随后收回空瓶,最后停栖在衣架上等待下一个任务——所有动作连贯顺滑。借助视频护目镜和一只简易的单手控制器,行动不便者可远程引导机器人从室外取一杯咖啡并带回,距离可达数十米。在户外试验中,机器人能停栖于竹子与杆子之间,通过收缩机体挤过狭窄岩缝,并能携带饮料横渡河流,暗示其在配送、检测与救援中的潜在角色。
对日常生活意味着什么
该工作表明,一种小型、手形的飞行机器人可以将灵活飞行与出人意料的人类式抓取、停栖及与物体和人员交互的能力结合起来。通过将机体设计、运动规划与自适应控制紧密整合,作者克服了制约早期空中操作器的诸多体积与稳定性问题。尽管未来版本需要更好的机载视觉和更智能的决策能力以实现完全自主运行,这项研究指向了一个前景:在未来,“飞行之手”可能帮助配送包裹、辅助残障人士、维护基础设施,并在对人类来说尴尬或危险的地方执行精细任务。
引用: Wu, Y., Yang, F., Jin, R. et al. Hand-like autonomous flying robot for airborne grasping and interaction. Nat Commun 17, 2200 (2026). https://doi.org/10.1038/s41467-026-68967-3
关键词: 空中操作, 飞行机器人手, 无人机, 人机交互, 仿生机器人学