Clear Sky Science · zh
昆虫尺度的人造视觉-嗅觉仿生复眼
一台微小设备兼具机器人之“眼”与“鼻”
想象一种机器人昆虫,不仅能看清前方路径,还能“闻到”空气中的危险气体——这一切都由一个不比真实苍蝇眼大多少的装置完成。本文描述了这样一个创作:一种微型人造复眼,将视觉与嗅觉集成于单一超轻传感器中。研究人员借鉴果蝇等昆虫的策略,展示了未来无人机和小型机器人如何在环境复杂、危险的场所中快速且安全地导航,同时消耗极少能量。

大自然给工程师的启示
像果蝇这样的昆虫依赖复眼——由数百个微小透镜组成的穹顶——以在广阔视野内察觉运动,帮助它们躲避捕食者和障碍。同时,它们的触角提供灵敏的嗅觉,使它们能在空气中探测食物、配偶或威胁。这两类信息在昆虫大脑中融合,以指导快速决策。作者着手在硬件中重现这种双重感知:制造一个昆虫尺度的设备,模仿苍蝇的广角运动检测,并集成化学“鼻子”来读取周围空气,然后将两类信号融合以实现更智能的行为。
制造一个真正可用的小型曲面眼
团队构建了一个近似小型昆虫头部尺寸的圆柱形人造眼,在仅1.5毫米见方的区域内塞入了1,027个微小透镜。采用超精密3D打印工艺,他们将曲面微透镜阵列直接打印到一层柔性有机光电探测器上。每个透镜与一个探测器对齐,形成单个“像素”,各自朝向不同方向,类似昆虫的单眼复眼晶胞(ommatidium)。透镜设计具有窄接受角,以避免来自某一方向的光线溢出到相邻像素,近似模拟真实复眼中的光学隔离。为应对雾和湿度,研究人员在透镜间加入了显微级的毛状结构,帮助防止水滴在表面凝结,类似真实昆虫眼周的自清洁毛发。
实时观察运动并感知空气
在透镜下方是一层经特制的光敏层,由有机半导体与硫化铅量子点混合制成。这种组合使设备能够检测从紫外到可见再到近红外波段的光,并能在约一万分之一秒的时间尺度内响应——足以实现约每秒1000帧的闪烁融合速率。该设备并不形成清晰细腻的图像,而是记录广角视野内不断变化的亮点,通过一个简单的数学模型将这些变化转换为关于物体位置、可能距离及运动的信息。与此同时,喷墨打印的比色阵列充当人工鼻子:含有金属配合物和pH敏感染料的微小斑点在接触特定有害气体时会发生颜色变化。一种受苍蝇启发的轻量哈希算法将这些颜色变化转换为气体种类和大致浓度,在十种常见有毒蒸气中约有93%的识别准确率。
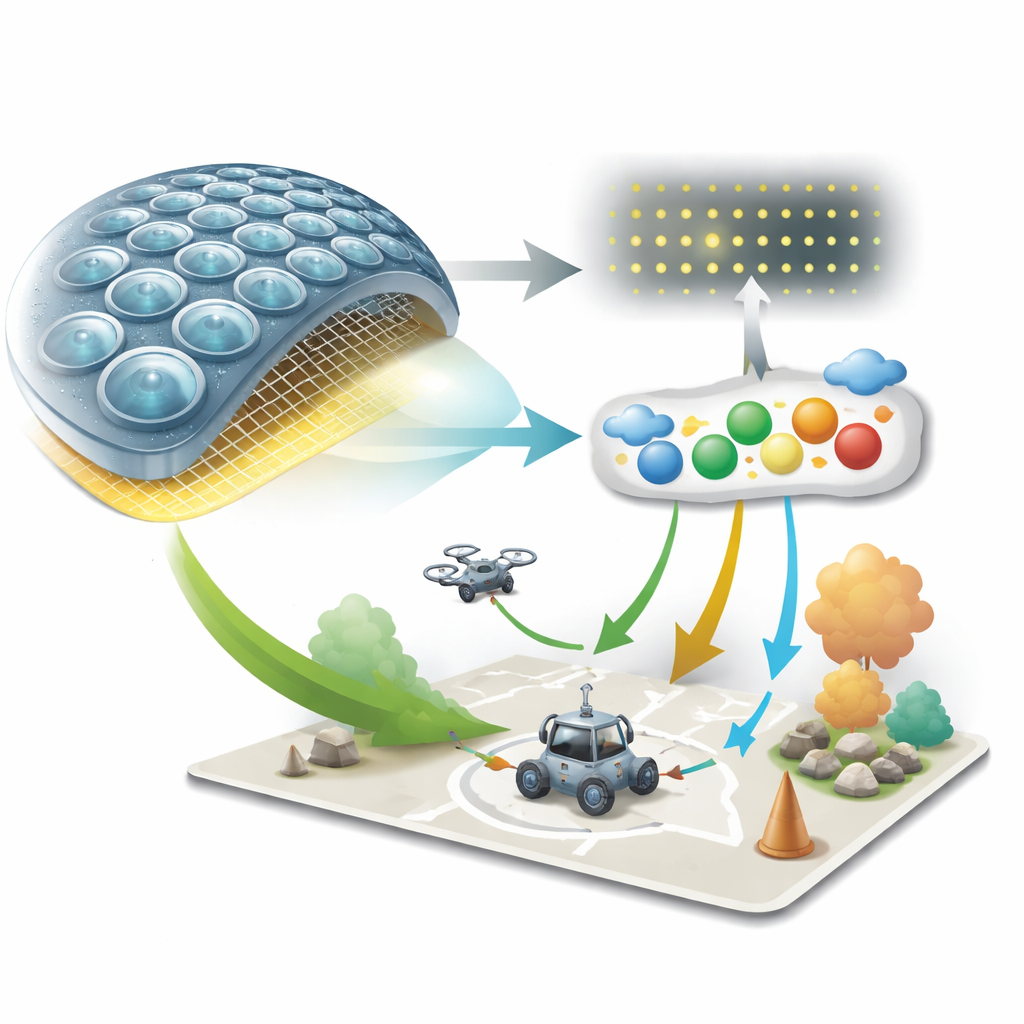
从实验台到爬行机器人与无人机
为证明这款昆虫尺度的“眼与鼻”在实验室外同样实用,研究人员将其安装在两种小型无人平台上。在一台全向轮式机器人上,曲面复眼使系统能监视180度水平视野并以足够快的速度检测运动,从而在雾天条件下也能躲避接近的障碍。受昆虫逃逸行为启发的简单硬件实现规则使机器人在巡航时能后退或绕开来袭物体。在一台小型无人机上,同一设备跟踪三维空间中移动光源的位置,并与气体传感器结合,引导无人机在包含光源和有害化学物羽流的测试环境中自主探索。视觉与嗅觉信息被融合,使无人机既能跟踪目标也能在空间中绘制危险气体分布图。
这项工作为何对未来小型机器重要
这项工作展示了在与真实昆虫眼类似大小的传感器中,集成广角高速视觉与化学检测是可行的。该设备以牺牲细腻图像细节换取运动灵敏度、宽谱响应与能效——恰恰是对电源和计算资源有限的小型无人机与机器人的关键权衡。通过将“眼”和“鼻”合为一体并借用昆虫大脑的融合策略,这项研究指向未来由小型、低成本自治机器组成的集群,它们能够像飞行昆虫一样灵活地躲避障碍、识别危险气体并探索复杂环境。
引用: Wang, J., Wei, S., Qin, N. et al. An insect-scale artificial visual-olfactory bionic compound eye. Nat Commun 17, 2259 (2026). https://doi.org/10.1038/s41467-026-68940-0
关键词: 仿生复眼, 生物启发机器人学, 多模态传感, 微型视觉系统, 有害气体检测