Clear Sky Science · zh
通过推力诱导低重力增强机器人跳跃,实现精确、可预测且延长的跳跃
像在月球上一样跳跃的机器人
想象一台救援机器人能够跨越墙壁、跳过溪流,或穿过移动的窗户而落点误差不超过一厘米。本文介绍了一种新的跳跃机器,通过短时间内为自身制造“低重力”环境(类似月球或冥王星的感觉),同时保持跳跃的精确性和可预测性,从而做到这一点。
今天跳跃机器人面临的难题
像树蛙或蟋蟀等动物可以跳很远、落在狭窄支点上,并在空中调整以应对变化。大多数机器人做不到这一点。传统跳跃机器人面临权衡:要么通过强力弹簧或电机实现远跳,要么能安全精确地着陆,但很少能兼顾两者。弹簧“弹射”设计能储存大量能量,但充能慢且一旦飞起后难以控制。电机直接驱动的腿更易控制,但缺乏实现极高跳跃所需的爆发力。加装翼或转子可以延长滞空时间,但往往使飞行路径变得混乱且不可预测——如果必须命中小目标或躲避移动障碍,这就是大问题。
用气流推力伪造低重力
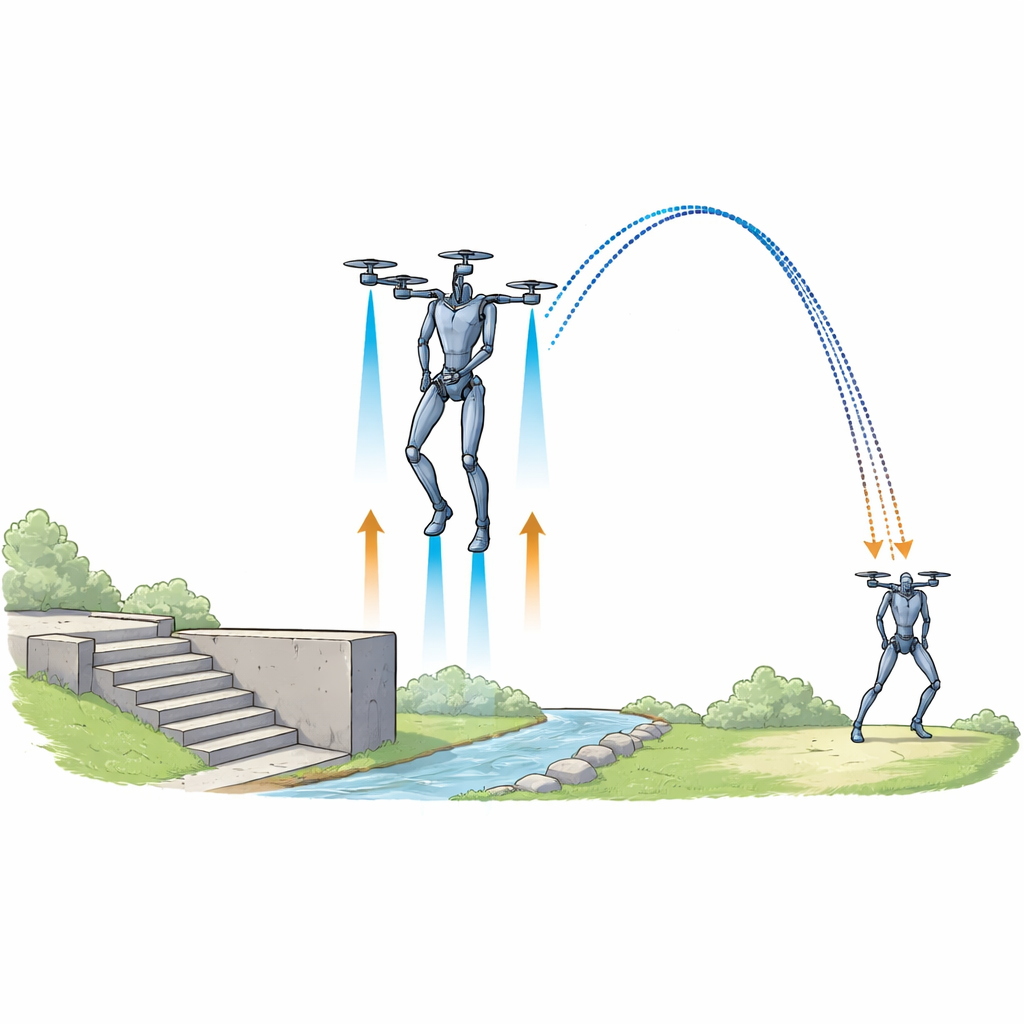
研究人员制造了一台重约370克的双足机器人,名为GravOff,通过为自身创造低重力环境来规避这一权衡。该机器人配有一对像昆虫一样的长腿,由电机直接驱动,并在宽框架上安装了四个小型螺旋桨。起跳时,腿部提供快速的地面冲力以获得高离地速度;与此同时,螺旋桨向上推力恰到好处地抵消部分地球重力,作者将这种状态称为推力诱导的低重力。由于“有效重力”降低,相同的腿部功率能将机器人送上更高更长的弧线——高度可达6.9米,约为其体长的46倍——相当于最佳纪录跳者,但起跳与着陆速度更温和。
绘制并引导完美弧线
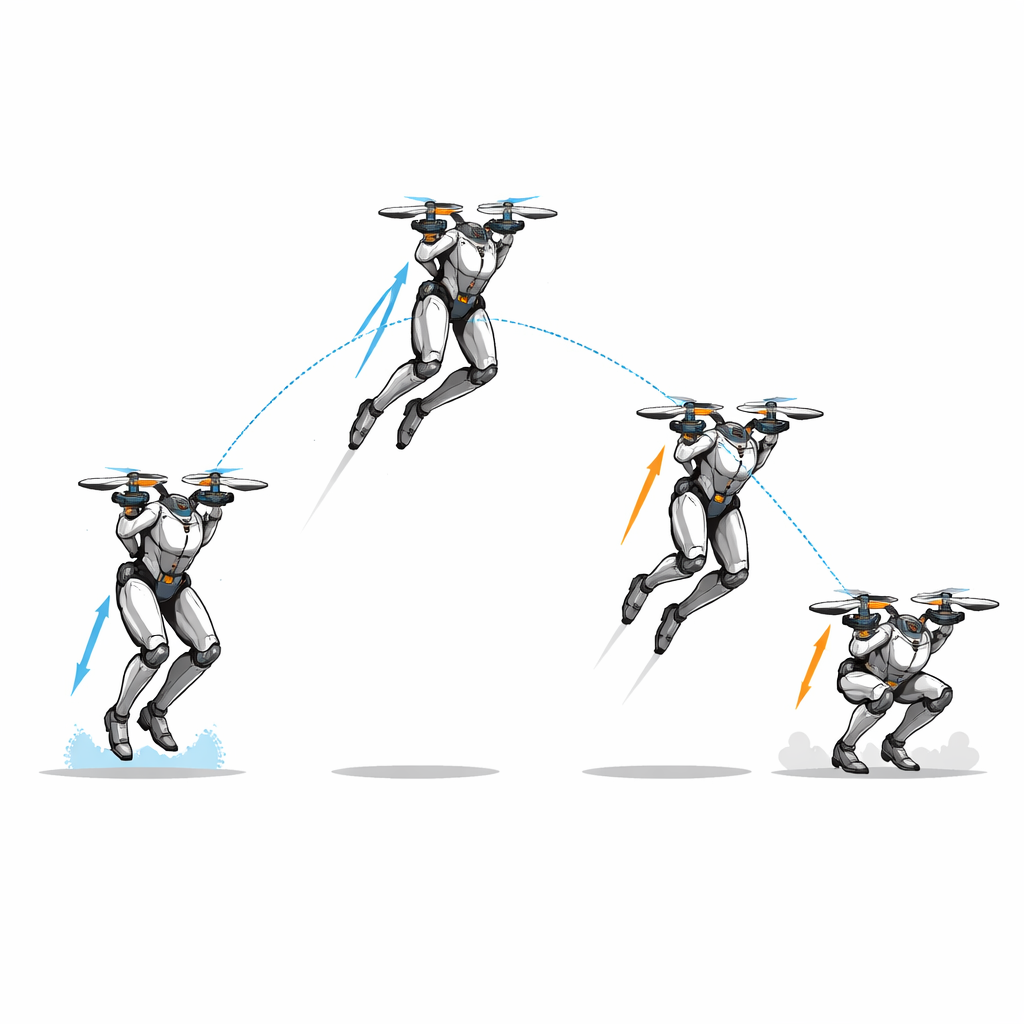
GravOff的特殊之处不仅在于跳得远,还在于它如何精确地沿着预定路径飞行。团队将每次跳跃视为有时间戳的弧线,将位置和时间像绘制的抛物线上的点一样锁定在一起。通过传感器与预测控制算法,机器人每秒数十次将实际的空中运动与参考曲线比较,并微调螺旋桨倾角以将自身推回轨道。关键在于,螺旋桨的摆角可以独立于机体倾斜,这样机器人无需整体倾斜就能定向推力,从而保持平衡与转向分离。这种双重控制使GravOff能够以毫米级重复性在边长仅25厘米的方形区域内着陆,即使起跳角偏差达15度或在飞行中遭遇速度为3.5米/秒的强风扇吹袭也能做到。
无弹跳的柔和稳定着陆
高跳通常意味着猛烈的着陆,可能损坏硬件或使机器人翻滚。GravOff通过两种着陆模式来应对这一问题。对于特别强的冲击,每条腿内置的软质3D打印减震器可吸收能量。对于在小目标或移动目标上精准着陆,机器人主动收腿并在恰当时刻再伸展,从而延长与地面的接触时间。这种“主动阻尼”使冲击力相比被动着陆降低约四倍,几乎抵消来势动量,使机器人在首次着地时便停止,而非弹开。
从实验室跳跃到真实任务
除了受控的室内测试,作者还展示了GravOff如何将跳跃与爬行和轮行结合,以应对真实地形。它可以慢速在草地、沙地、碎石和有纹路的人行道上爬行以调整安全起跳姿态,然后利用低重力跳跃跨越障碍,例如多级楼梯、2.35米高的墙或宽三米的溪流。与纯飞行清除中等大小障碍相比,低重力跳跃策略在能耗上也更高效:在一些测试中,跳跃消耗的能量不到悬停或飞越同样障碍所需总能量的十分之一。
对未来机器人的意义
简单来说,这项工作表明机器人通过“假装”重力较弱并在起跳后调整飞行轨迹,可以跳得更远、更准确且更安全。GravOff的设计暗示未来的勘探者在灾后救援中可在瓦砾间跳跃,或在其它行星上横越悬崖与陨坑,同时能精确预测何时何地着陆。相同的思路——用推力抵消重力并在空中操控弧线——可以被添加到许多其他跳跃机器人上,可能将跳跃变成一种可靠且可预先规划的移动方式,而非冒险的最后手段。
引用: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
关键词: 跳跃机器人, 低重力环境, 推力矢量控制, 有腿运动, 轨迹控制