Clear Sky Science · zh
仿生脉冲架构实现能量受限的触觉编码
为什么更聪明的触觉对机器人很重要
我们的指尖能在不到一秒的时间里感知一粒沙子、一只滑落的玻璃杯或轻轻一碰,而且消耗的能量极少。随着机器人走出工厂进入家庭、医院和拥挤的工作场所,它们需要类似的触觉以便与人和易碎物体安全互动。本研究介绍了一种新的人工皮肤和受大脑启发的处理系统,使机器能够以高精度检测触点位置,同时将能耗保持在极低水平——这是未来移动和协作机器人关键的要求。
像我们一样有感觉的柔性皮肤
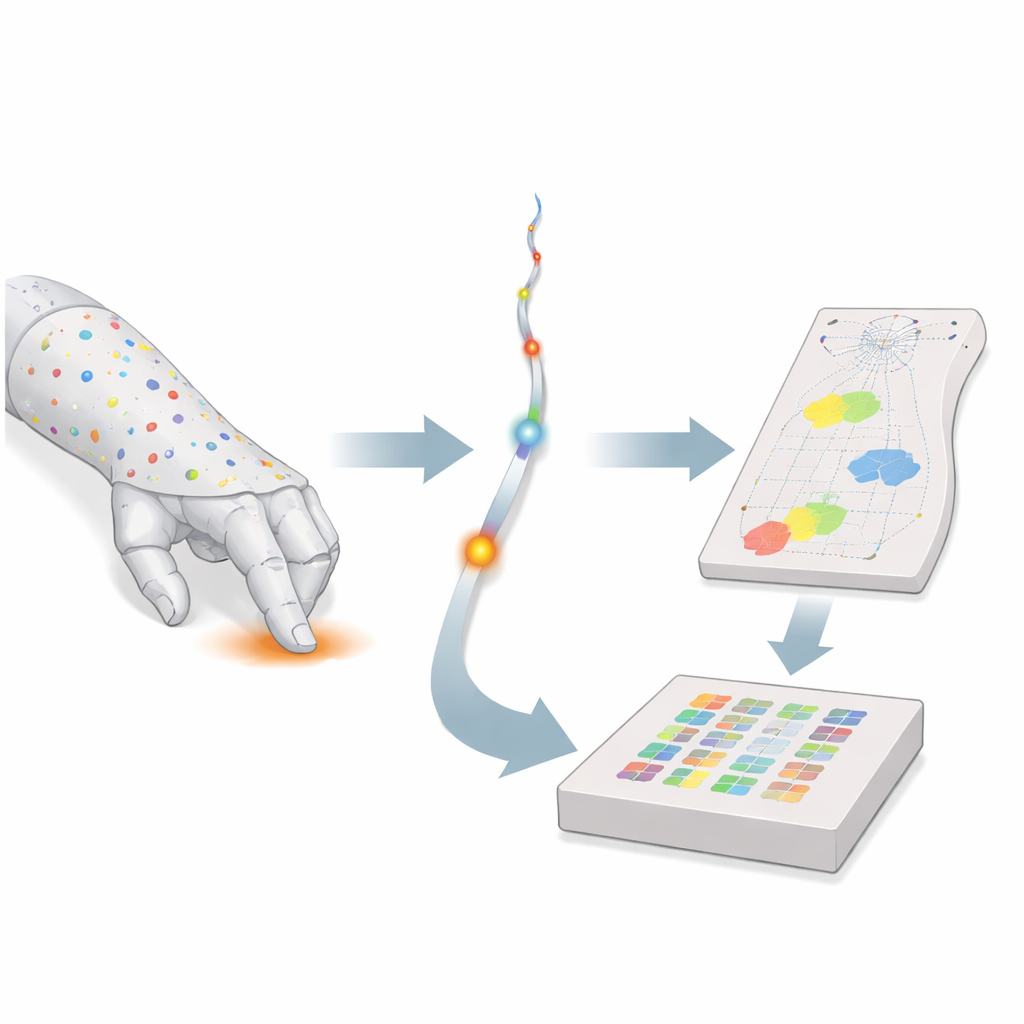
研究人员制作了一块柔软的硅胶“电子皮肤”,形状类似人类前臂,并沿着一根极细的光纤布置了21个微小光学传感器。这些被称为光纤布拉格光栅的传感器,会在皮肤拉伸和弯曲时改变光纤内反射光的波长。由于光纤位于表面下方盘绕,每个传感器不仅对单点敏感,而是对一小片区域有反应,类似于我们皮肤中分布的真实触觉感受器。有些人工感受器对局部压力反应强烈,而另一些对形变有更宽的响应范围,呼应了人体皮肤中不同神经末梢既能捕捉细节又能感知整体形状的特点。
把触觉变成电脉冲
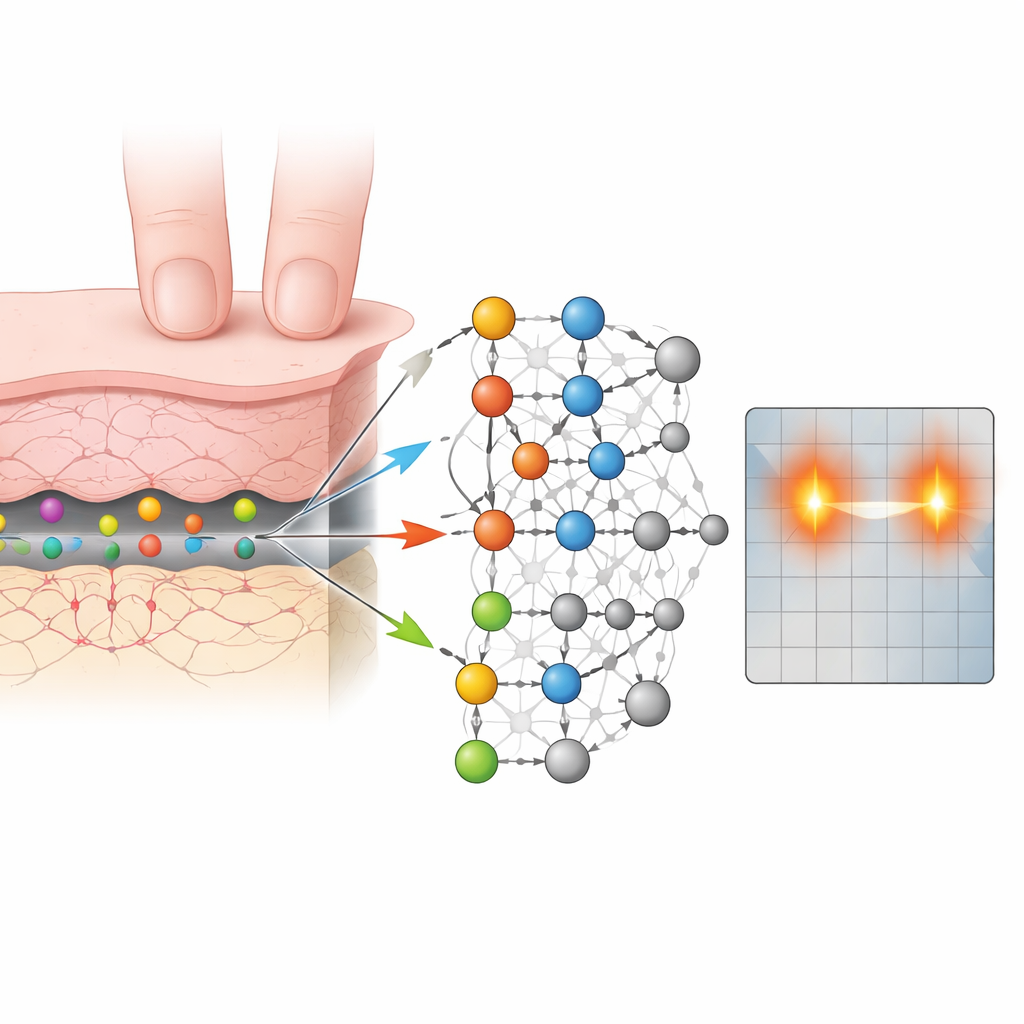
为了解读这丰富的数据流,团队没有依赖传统的处理数值帧的深度学习模型,而是更接近生物做法,使用脉冲神经网络——信息以短促的电脉冲或“尖峰”的形式传播,类似神经冲动。电子皮肤的光学信号被转换成脉冲流并送入网络。网络中的每个输出神经元代表皮肤上的一个特定位置,形成表面的一张二维内部地图。当物体触碰电子皮肤时,一簇神经元以能揭示接触位置的模式放电,系统通过该活动中心计算触点位置。
更锐利的触觉更少资源
采用这种设计后,系统能在人工前臂上定位单点触碰,典型误差约为三毫米,性能比一个强大的深度学习基线好约三分之一,并且实现了约十倍优于仅凭传感器间距预期的空间分辨率。它在多点同时按压时也能工作,最多可同时识别四个接触点,并能应对手动施加、力度和方向各异的按压。研究人员探究了网络内部不同的连线模式,发现受脊髓早期触觉通路启发的布局——兴奋性细胞激活抑制性中间神经元以抑制邻近输出——对锐化空间细节至关重要。这种“侧向抑制”有助于保持表征清晰,防止接触点彼此靠近时出现模糊。
为低能耗而生,而不仅仅是追求准确性
该工作的一个核心目标是控制能量消耗——如果整个机器人身体都覆盖传感器,这一问题将变得至关重要。团队在训练网络时逐步施压以减少放电次数,模拟进化中在原始性能与代谢成本之间的权衡。在不受限制的条件下,一种更灵活、在生物学上不那么逼真的架构表现略好。但一旦将脉冲活动减少到能效水平时,仿生布局反而胜出,在相同活动预算下提供了更高的准确性。随后,研究人员将该网络移植到一种混合信号的类脑芯片上,该芯片在模拟电子学中直接实现了神经元和突触。在这套硬件上,触觉系统在触碰时的功耗低于毫瓦级,静息时仅有数微瓦,同时精度损失极少。
从实验室前臂走向未来的机器人身体
总体而言,这项工作表明,谨慎地将柔软、分布式的传感与类脑脉冲计算结合,可以在不带来高能耗的情况下赋予机器精确且快速的触觉。通过不仅匹配性能而且模仿神经系统早期触觉通路的连线原则,该系统也暗示了为什么进化可能偏好某些电路模式:在严格的能量限制下,它们能提供足够好的准确性。若将规模放大,类似的电子皮肤和类脑处理器可以使机器人和义肢在其表面感知接触,快速对意外碰撞作出反应,并在复杂、动态的环境中以更安全、更自然的方式与人类互动。
引用: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
关键词: 人工皮肤, 触觉感知, 脉冲神经网络, 类脑硬件, 机器人安全