Clear Sky Science · zh
通过机器人与机器学习整合工作流程实现应变不敏感性能的可拉伸电极的预测性设计
像皮肤一样可拉伸的电子器件
从跟踪心跳的智能衬衫到像有生命体一样运动的软体机器人,未来的设备需要能在拉伸、扭曲和弯曲时仍然可靠的线路和电池。本文描述了一种新的设计方法,用于制造这样的“可拉伸电极”,使其在被拉长到原始长度数倍时仍能保持工作。通过将实验室机器人、人工智能和计算模拟结合,研究人员发现了一些更像弹性皮肤而非脆性金属的材料与结构。
为什么可拉伸导线难以制造
大多数金属和电池材料在导电方面表现优异,但难以承受应变。薄金属膜在拉伸时会迅速出现裂纹,其电阻急剧上升,导致设备失效。工程师曾尝试液态金属、纳米线网络以及分散应力的巧妙图案,但要同时兼顾高导电性、大拉伸性和在应变下稳定的性能一直很难实现。传统逐一参数试错的方法无法应对海量的可能配方和加工步骤。
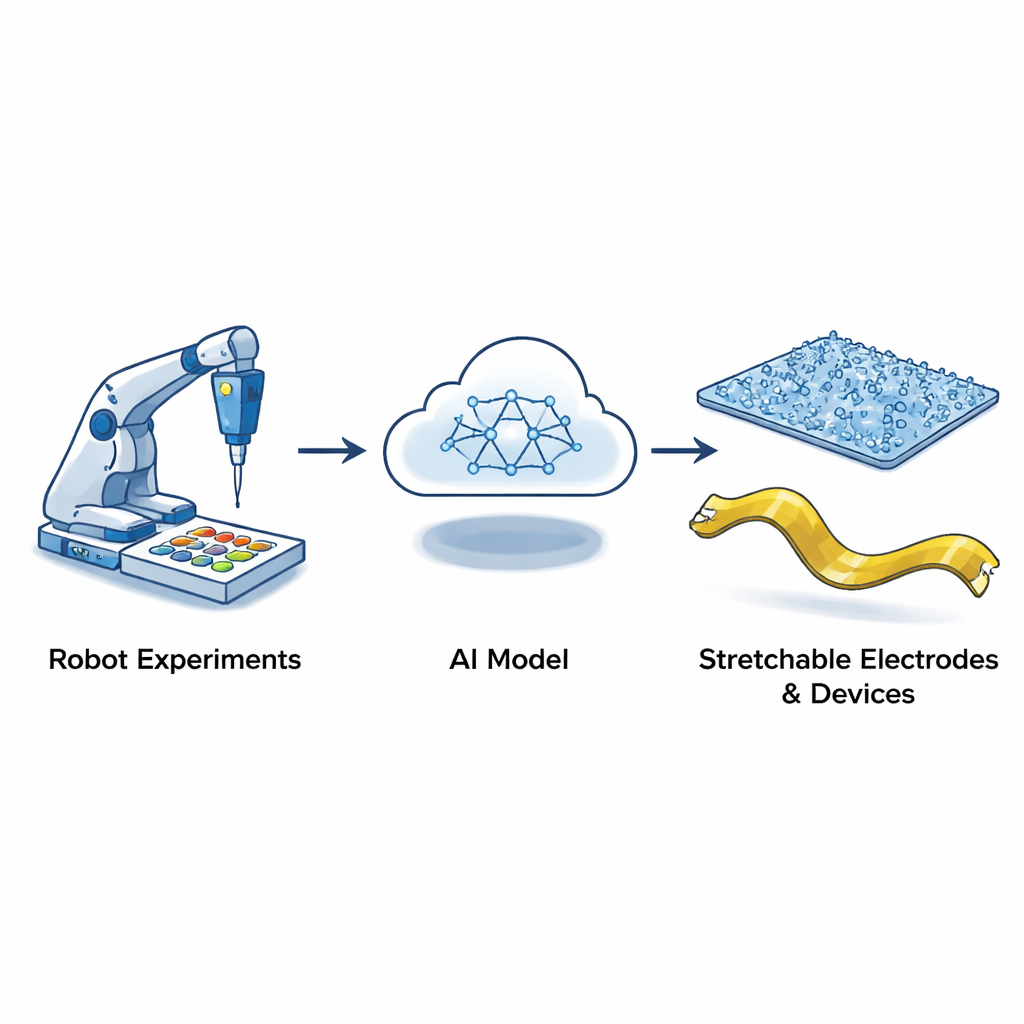
让机器人和人工智能探索巨大的设计空间
作者通过构建一个集成的“材料发现”流程来解决这一问题。移液机器人首先混合数百种由四种构件组成的组合:导电的MXene片、碳纳米管、金纳米颗粒和一种柔性聚合物。这些混合物被过滤成薄膜并测试其导电性能。基于这些结果,机器学习模型迅速筛除表现差的配方,并绘制出更有前景的设计区域。随后在若干轮“主动学习”中,人工智能提出最具信息量的新配方和加工条件;机器人制作这些样品,团队测量其性能,并更新模型。数据扩充技巧在不需要成千上万额外实验的情况下进一步提升了模型的可靠性。
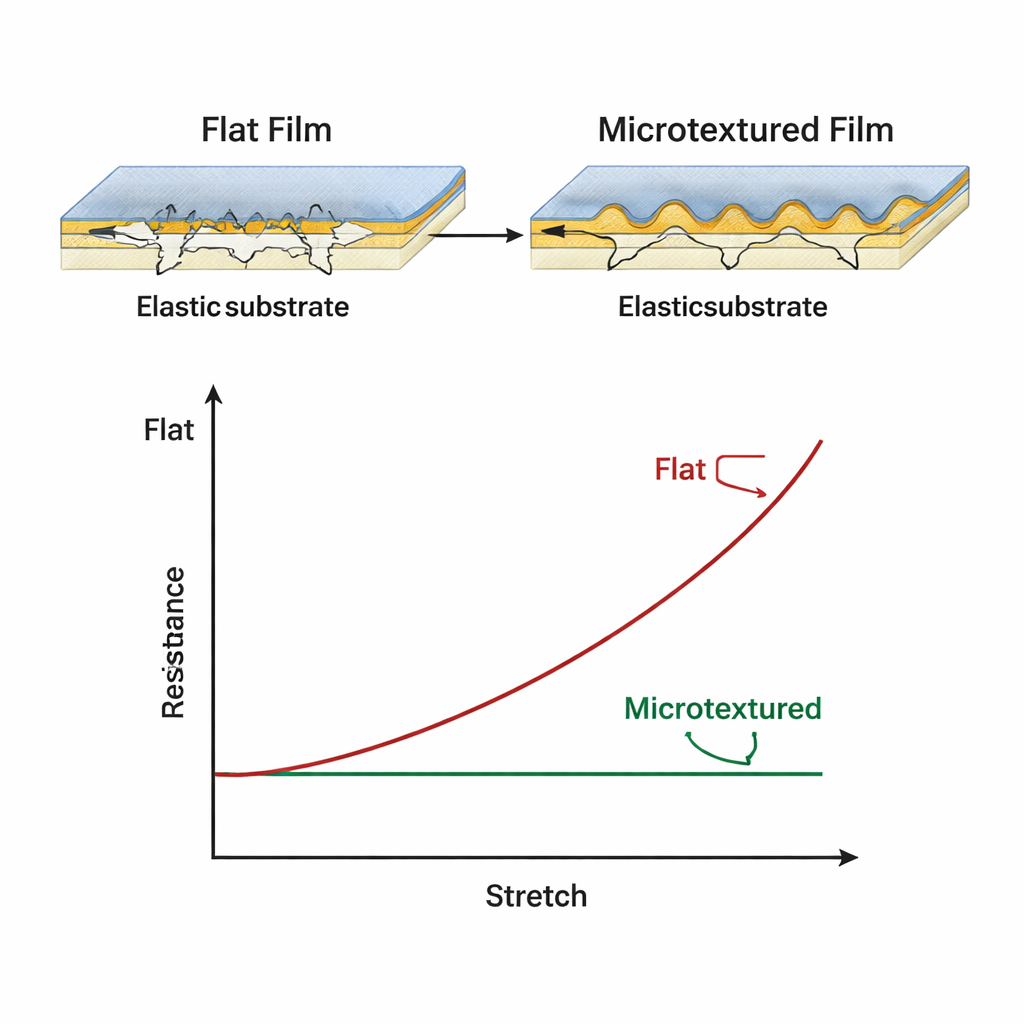
创造能驯服大应变的微小皱褶
除了成分外,关键洞见在于可以通过工程化薄膜的表面形貌来应对拉伸。通过在特殊塑料片和粘性胶带上缩小并重新拉伸材料,团队制备出带有分级皱褶和皱缩结构的微纹理薄膜——在波纹之上的脊状结构。计算机模拟揭示了这些形貌的工作机制:在拉伸时,皱褶优先被拉平,吸收变形,使得材料本身仅承受很小的局部应变。只要这些局部应变保持在某一阈值以下,导电通路就能保持完整,电阻几乎不变,甚至在数百百分比的伸长下亦是如此。
从超可拉伸导线到软电池
利用其“冠军”预测模型,该工作流程推荐了一种特定的微纹理纳米复合材料,作为非常薄的金膜的支撑底层。经优化的层叠结构使得金导体的行为几乎接近块体金属,但在其电阻明显增加之前可被拉伸至原长的十倍以上,并能承受数万次的拉伸—放松循环。同样的设计原理被用来制造一种完全可拉伸的锌—二氧化锰电池。在这里,微纹理的金集电体承载较厚的刚性电池材料,但成品器件在延伸至300%时仍能在数百次充放电循环中保持几乎不变的容量和效率。
这对未来可穿戴技术意味着什么
对非专业读者来说,核心信息是:团队展示了一套实用配方,用以构建可随人体或软体机器伸展的柔软、耐用的电源与导线组件。他们的机器人与人工智能引导流程可以快速找到在极端变形下仍能保持电学性能稳定的成分组合和表面形貌,替代缓慢的猜测式方法。这一策略可加速舒适医疗可穿戴设备、柔性物联网设备和下一代软体机器人的开发,使电子设备更接近能像皮肤与肌肉那样自然运动的目标。
引用: Yang, H., Chen, Q., Chen, T. et al. Predictive design of stretchable electrodes with strain-insensitive performance via robotics- and machine learning-integrated workflow. Nat Commun 17, 1778 (2026). https://doi.org/10.1038/s41467-026-68484-3
关键词: 可拉伸电子, 可穿戴设备, 机器学习设计, 软电池, 微纹理材料