Clear Sky Science · zh
通过两阶段紫外固化液晶弹性体的槽式光聚合实现4D打印
会记住形状的智能材料
想象一种医疗支架可以穿过微小的血管,然后在体内温和地展开——随后又能按需收缩。或者一种软体机器人仅凭温度变化而非电机和齿轮即可爬行和抓取。该研究展示了如何3D打印这样“智能”的物体,使它们不仅能保持复杂的三维形状,还能随时间以受控、可重复的方式改变形状。
从3D物体到随时间变形的4D结构
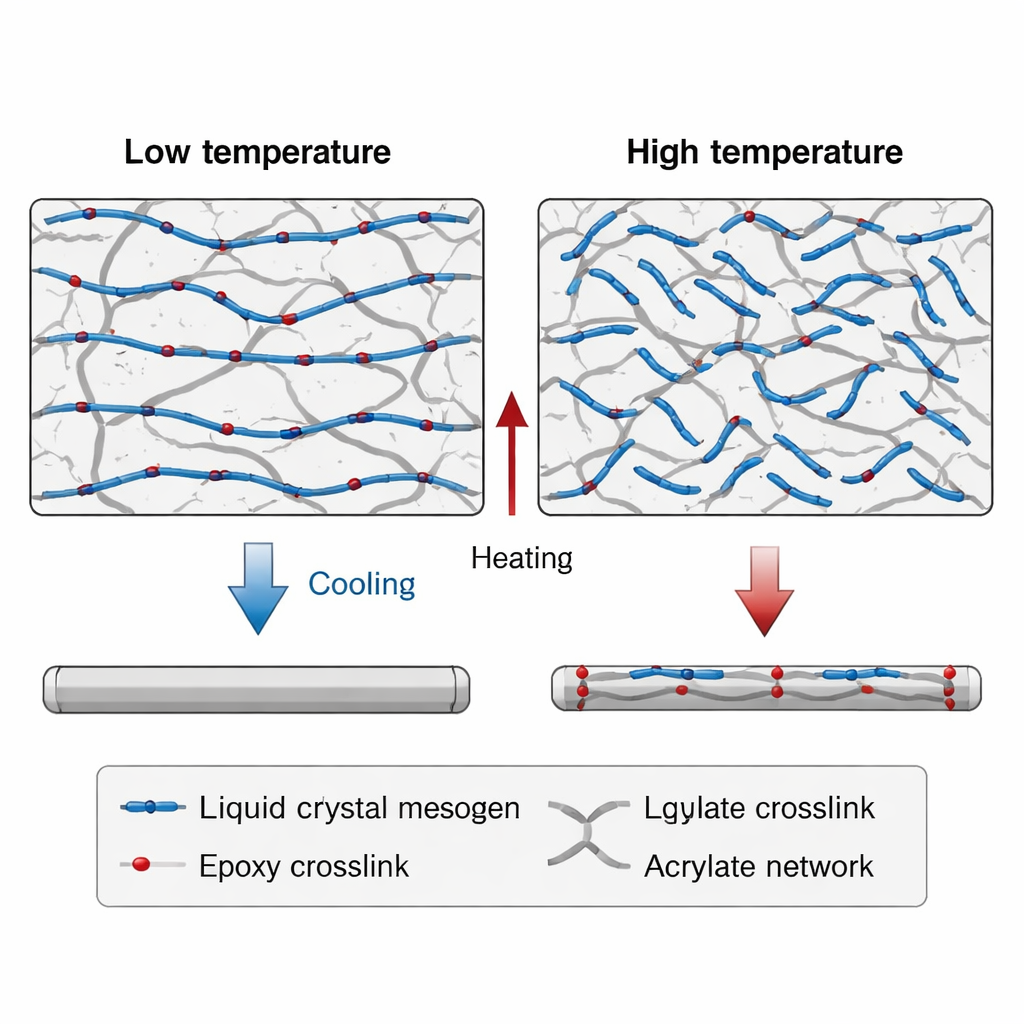
传统3D打印构建的是固定物体,而4D打印将时间作为新维度:打印部件在受热、受光或其他信号触发时会改变形状。液晶弹性体是这一领域一类特别有前景的材料——它们是含有能排列并协同运动的杆状构件的橡胶固体。受热或降温时,这些构件会重新排列,使整体材料弯曲、拉伸或收缩。然而,以往多数工作依赖将这些材料通过喷嘴挤出,这限制了细节精度,并使得制造诸如开放格栅或精细建筑模型等精巧、独立结构变得困难。
一种新的打印与运动编程方法
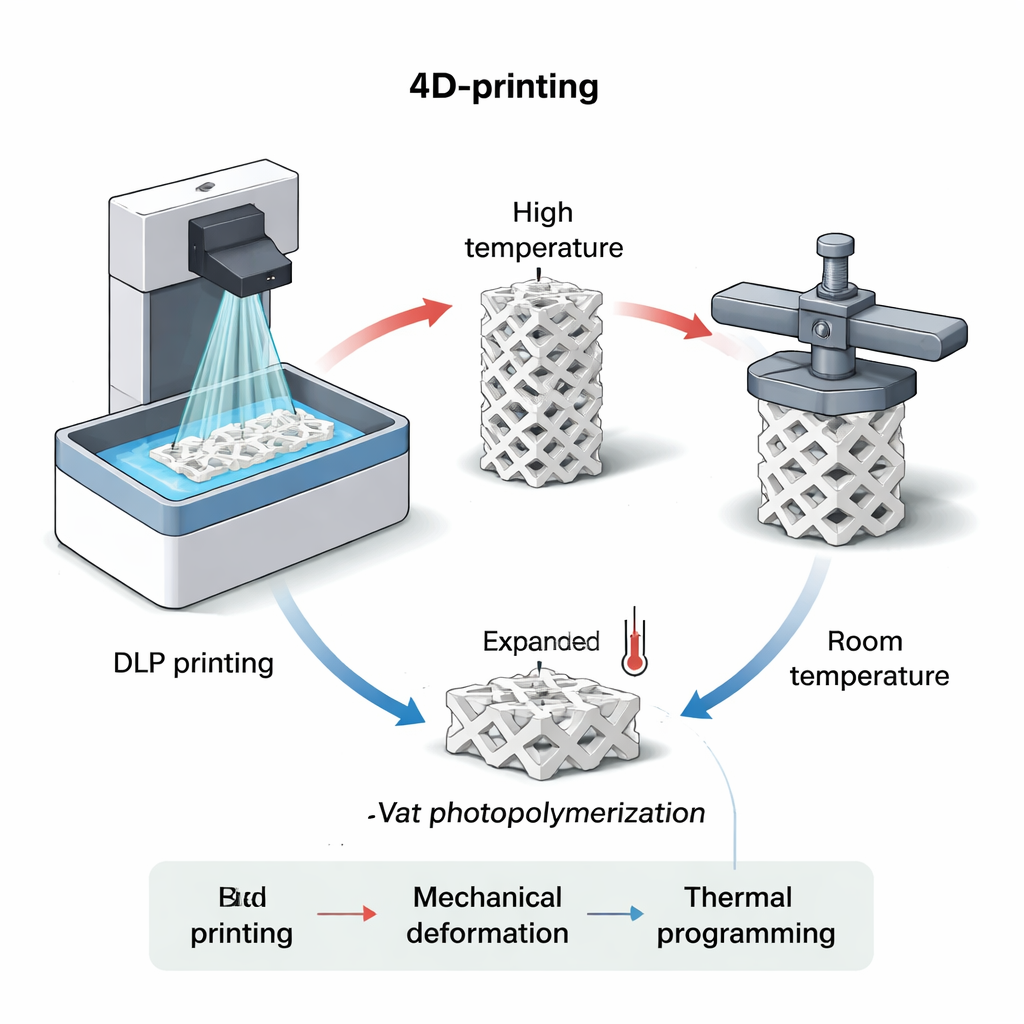
作者将这些液晶弹性体与另一种3D打印方式——槽式光聚合(vat photopolymerization)相结合,这种方法常用于高分辨率打印机。在此方法中,光投影仪固化液态树脂的薄层,从而构建出具有数十分之一毫米级特征的固体对象。团队设计了一种可发生两阶段反应的专用树脂。在第一阶段,紫外光使丙烯酸酯组分发生交联,形成可打印成复杂形状的柔软橡胶网状结构。关键在于树脂中的另一类基团——环氧基此时仍未反应,像是待用的额外连接点。
用热量“锁定”形状
打印完成后,研究人员进行一个单独的“编程”步骤。他们通过拉伸、压缩或弯曲将打印件机械变形到期望的构型。这种大尺度的塑形迫使内部的液晶构件沿局部应力方向排列。在保持该变形状态的同时,将部件轻微加热,使环氧基开始反应并形成额外的永久连接。这些新形成的连接有效地冻结了内部排列和整体形状。冷却并释放后,结构在室温下保持该编程形态;当加热超过某一转变温度时,它又会回弹向原始打印形状;再次冷却则返回到已编程的构型。这种往复变化是可重复的,从而实现真正可逆的“形状记忆”,无需直接的机械复位。
调节强度、柔软度与运动特性
通过调节丙烯酸酯与环氧组分的比例,团队能够精细控制材料的刚性、强度和响应性。只需少量环氧时,弹性体仍然柔软且可拉伸,但获得了足以可靠保持编程形状并在加热时以近乎100%精度回复的额外交联。更高的环氧含量会产生更刚性的材料,能承载更大载荷但运动幅度可能减小。利用优化配方,研究人员展示了一系列温度响应结构:通过加热刚度可增三倍的格栅;在拉伸时横向膨胀而非变窄的负泊松结构;以及可通过热翻转在两个稳定形态间切换、用于反复吸能和释放能量的双稳元件。
会变形的器件与软体机器人
为展示实际可能性,作者打印了数个可逆变形的复杂物体,包括可展开的天线、微型埃菲尔铁塔、可为插入而收缩随后再打开的医疗支架,以及会随热“绽放”的花状结构。他们还制造了能做手势或抓取物体的软体机器人手、一条通过打印“肌肉”带弯曲并抬起的义肢模型臂,以及受热冷循环驱动前进的尺取虫式机器人。所有这些示例都依赖相同的关键思想:物体先以一种形状打印,再通过机械方式编程为另一种形状,温度则作为简单的远程控制用于在两者之间切换。
对未来设备的重要意义
对于非专业读者而言,重要性在于复杂的运动设备现在可以作为单件打印出来,使用广泛可得的化学体系和高分辨率打印机。设计者不再需要在打印过程中设计显微级的内部图案来控制运动;相反,他们可以在后处理阶段塑造整体变形,让材料在内部自发重排。本工作为成本可控、精细且完全可逆的形状变化系统打开了大门,应用范围从医疗植入物和自适应建筑构件,到轻量化航空器件和无需外部供能的软体机器人。
引用: Jiang, H., Chung, C., Gracego, A.X. et al. 4D printing through vat photopolymerization of two-stage UV-curable liquid crystal elastomers. Nat Commun 17, 1671 (2026). https://doi.org/10.1038/s41467-026-68370-y
关键词: 4D打印, 液晶弹性体, 软体机器人, 形状记忆材料, 智能结构