Clear Sky Science · zh
超弹性碲热电涂层用于先进三模态微型传感
为什么给微小摄像头增加“触觉”很重要
医生越来越依赖内镜——细而柔性的摄像头——在无需大手术的情况下观察体内。这些工具已经能够显示彩色图像,有时还能测量探头对组织的压力。但它们仍然缺少一个重要线索:温度。许多疾病,包括炎症和某些肿瘤,会使组织比正常情况略微更暖或更硬。这项研究介绍了一种新型内镜端帽,能够同时观察、触摸并感知热量,可能帮助医生更早、更安全地发现隐匿的问题。
通向体内的柔性窗口
研究人员构建了一个仅几毫米宽的小型传感帽,可安装在标准医用内镜的前端。该帽由透明、弹性的硅胶制成,以便相机的光线仍能穿透。在这个柔软的穹顶内部,隐藏着由基于元素碲的特殊材料制成的微观图案。这些图案像微小的地标。当穹顶按压在组织上时,地标会发生细微位移,相机可以捕捉到这些变化,使计算机能够计算出探头施加的力的大小和方向。与此同时,碲图案还充当接触式温度计,将微小的温差转化为电信号,而不会遮挡医生的视野。 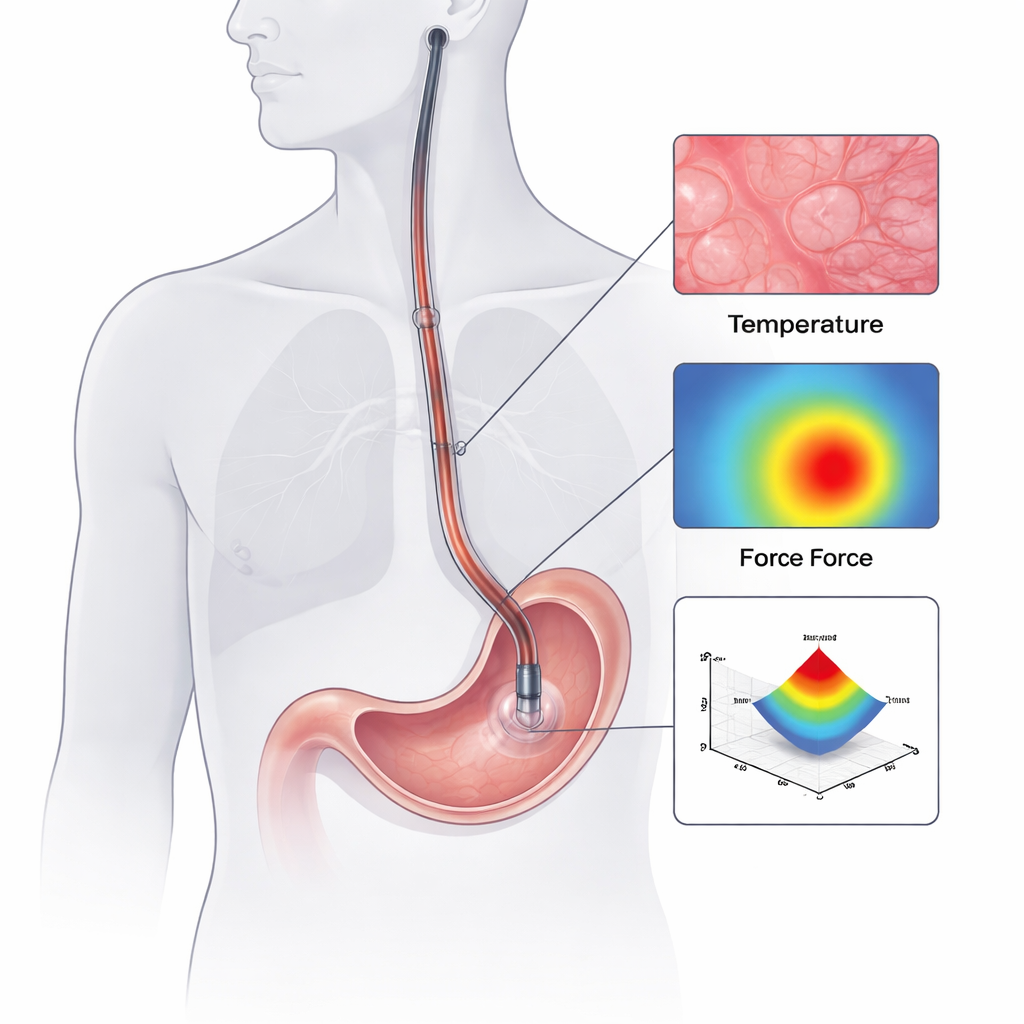
把热量变成有用的信号
温度传感的关键在于碲涂层。碲的晶体结构天然抑制热流,因此当一侧接触较暖的组织而另一侧面向较冷的环境时,薄膜上会形成明显的温度差。这一梯度产生微弱电压——类似微小的电源——且随温度稳步上升。团队将涂层设计为约200纳米厚、面积小于一平方毫米,但仍能产生清晰、稳定的信号。测试显示,电压随温度几乎呈线性变化,而且该材料的响应强于大块碲。这意味着探头能够检测接近体温的细微温度变化,这正是区分发炎或受刺激组织与健康组织所需要的。
训练人工智能读取触觉并清晰视野
因为相机能够看到碲标记,系统可以利用人工智能将它们的运动转化为三维力场图。作者通过将探头压在许多软性、类似组织的材料上,同时用精密仪器测量真实力值,建立了庞大的训练库。一个名为 EndoForce 的深度学习模型学会将视频中标记的位移与这些测量到的推拉力匹配。在测试中,即便在人工手按探头的情况下,它也能以仅几百分点的误差估算不同方向的力。第二个AI系统解决了另一个问题:标记会部分遮挡组织视野。通过一种称为视频修补(video inpainting)的技术,网络学习健康组织的外观,然后实时“补全”被遮挡的区域,恢复出的图像几乎和未涂覆内镜的图像一样清晰。
从实验模型到活体动物
团队首先在逼真的肺、胃和肠的塑料模型中测试了该装置。当他们将探头按到比周围材料更硬的人造肿块上时,系统测得的力更大,同时仍能提供表面清晰的重建图像。接着,他们在活体兔子上进行了测试。在胃黏膜制造轻度炎症后,他们用标准内镜技术经口将探头导入胃内。当他们以相似力度按压正常和发炎区域时,发炎斑块显示出更大的力值,并且温度读数比附近健康组织高出约4摄氏度。值得注意的是,在正常与发炎区域的边界处,温度升高先于明显的可视变化,这表明热图可能揭示单凭肉眼难以发现的隐患区域。 
这对未来诊断可能意味着什么
通过将视觉、触觉和温度感知集成到微小、柔性摄像头的尖端,这项工作指向了新一代“智能”内镜的方向。原型表明,可以在不牺牲成像清晰度或可操控性的情况下,为现有工具增加灵敏、低成本的涂层和AI软件。未来,这类系统可能帮助医生更可靠地区分健康组织与病变、在操作中避免意外的热损伤,甚至通过机器人控制“触摸”到隐蔽病变。对患者而言,这可能带来更快的诊断、减少侵入性活检以及更安全的微创手术。
引用: Cui, S., Li, L., Huang, ZX. et al. Superelastic Tellurium Thermoelectric Coatings for Advanced Trimodal Microsensing. Nat Commun 17, 1612 (2026). https://doi.org/10.1038/s41467-026-68317-3
关键词: 内镜, 触觉传感, 温度传感, 热电材料, 医学成像