Clear Sky Science · zh
基于水凝胶的电极用于高保真表面肌电采集与机器人手控制
倾听肌肉以驱动机器
想象一下,只需绷紧自己的肌肉就能控制一只机器人手。对失去手部功能的人或需要精确机器人辅助的工作人员来说,人体与机器之间这种无缝连接可能改变生活。但如今贴式金属电极僵硬、可能刺激皮肤且常产生噪声信号。本文提出了一种柔软、亲肤的“果冻状”电极,它紧贴皮肤,更清晰地捕捉微弱肌电信号,并用于操控逼真的机器人手。
像皮肤一样的柔软贴片
研究人员设计了一种新型水凝胶——一种富含水分、富有弹性的材料,类似隐形眼镜,用作皮肤表面的电极。他们将常见的塑料构建单元与天然添加剂(如来源于甲壳类的壳聚糖和植物中存在的单宁酸)、甘油及简单盐类结合。上述成分共同形成了一个可拉伸、离子导电的网络,既能传导电荷,又在皮肤上保持柔软和湿润。通过微调各组分的用量,团队制备出一种可在不破裂的情况下拉伸超过原长十二倍且仍保持可靠电性能的配方。
牢固、黏附并具自愈能力
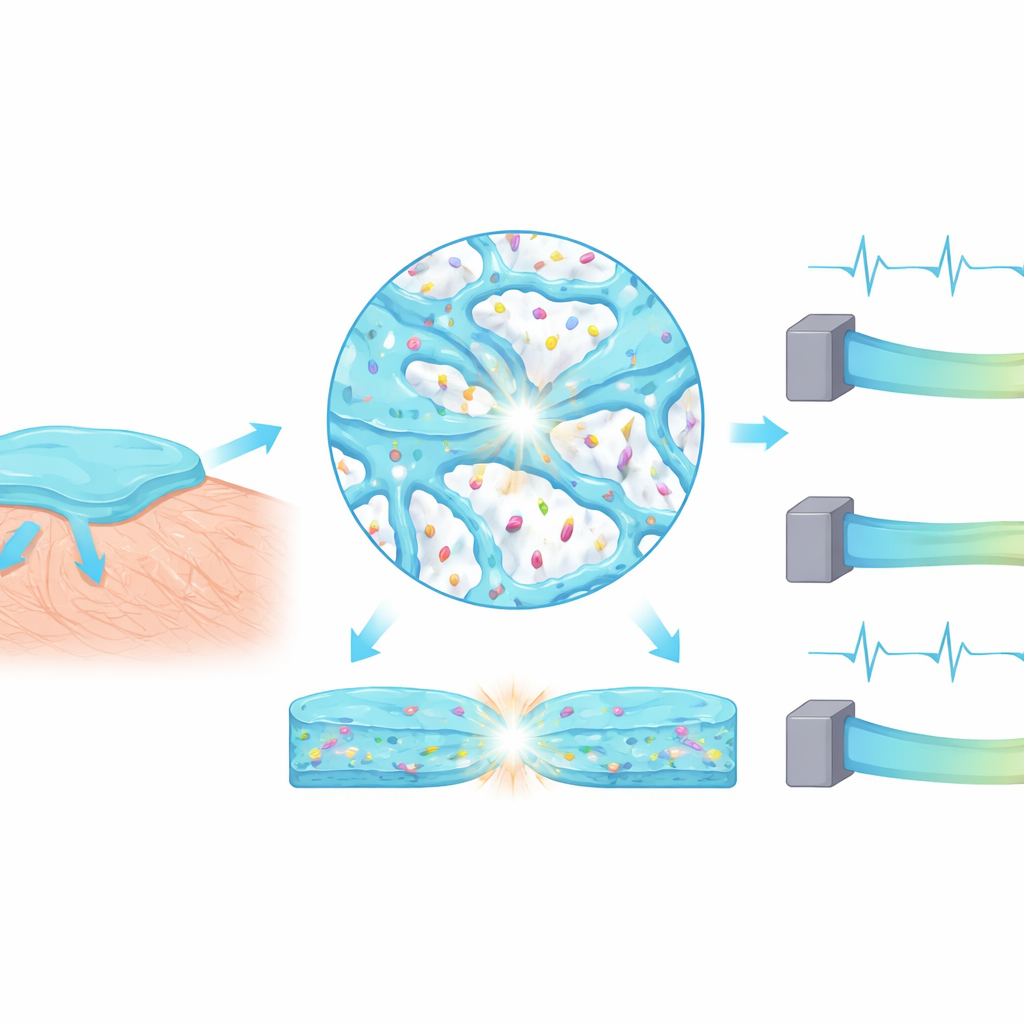
要在活动的手臂或手上良好工作,电极必须稳固贴合,能够承受弯曲和拉扯,并在轻微损伤后继续工作。新型水凝胶在这三方面表现出色。在显微镜下,它呈现出由许多分子间弱键构成的致密海绵状结构。这些弱键像减震器一样,使材料能够伸展、扭曲和压缩后回弹。它们还允许被切开的凝胶片随着时间重新连接;当团队将样品切成两半并压在一起时,凝胶逐渐愈合并恢复了几乎全部原有的电导性能。同时,单宁酸中的化学基团赋予凝胶对多种表面(从塑料和金属到猪皮和人皮)的强黏附性,这种黏性在经过多次粘贴-剥离循环后依然有效。
来自工作肌肉的更清晰信号
下一步是评估该软凝胶拾取表面肌电(sEMG)信号——皮下肌肉产生的微弱电压——的能力。研究人员将水凝胶电极贴在志愿者的前臂,并与同尺寸的商业氯化银/银电极对比。在握拳与放松等简单任务中,两类电极均记录到清晰的波形,但水凝胶提供了明显更高的信噪比。实际上,这意味着目标肌电信号比背景电噪声更突出,且在移动或重复使用电极时读数更稳定。即便在反复重新粘贴或刻意切割并自愈后,水凝胶贴片仍能持续捕获高质量信号,优于刚性的金属基垫片。
教机器人手识别手势
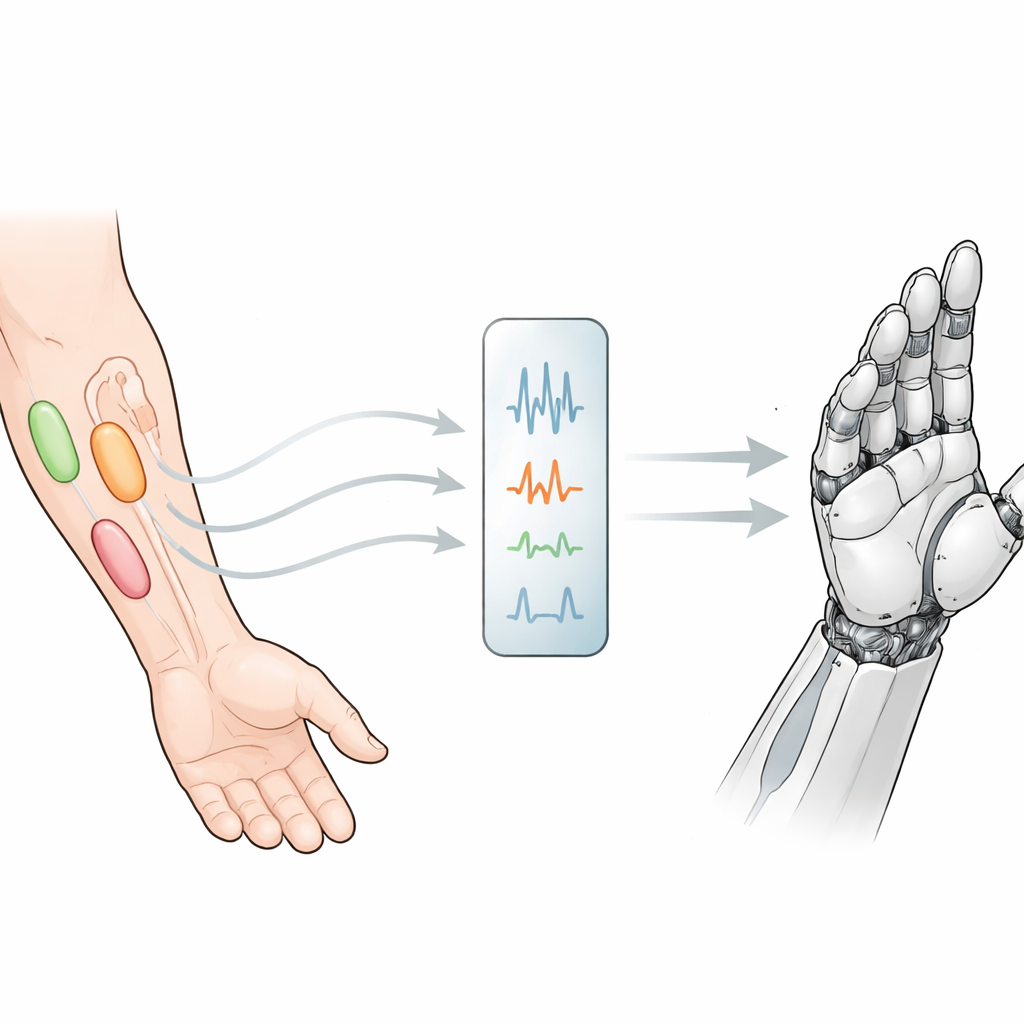
在获得更清晰的肌电信号后,团队搭建了一个完整系统,将这些信号转换为不同的手势。他们将集成的水凝胶电极放置在前臂的屈肌和伸肌上,记录志愿者执行五种常见手势(如“OK”手势、竖大拇指、张开手、指向和握拳)时的电模式。从这些记录中,研究者提取了简单的统计特征——信号强度、稳定性以及变化速率等,并将其输入计算模型。他们使用了一种将快速学习的神经网络与受鸟群启发的优化方法相结合的算法。该组合使系统能够快速学习哪些肌电模式对应哪种手势,并达到较高的识别精度。
从意图式指令到真实运动
最后,团队将识别软件与仿生机器人手连接。当志愿者做出训练过的手势时,水凝胶电极采集sEMG信号,算法识别出意图手势,机器人手实时模仿该动作。在多次试验中,系统的手势分类准确率超过94%,尽管它仅依赖一小组简单的信号特征。对非专业读者而言,结论很直接:一种柔软、自愈且具黏附性的凝胶贴片能比传统金属垫更舒适、更清晰地通过皮肤“倾听”肌肉活动,从而实现对辅助机器人可靠的控制。这一方法可为未来的假肢、康复工具和对人体自身电信号自然响应的可穿戴设备奠定基础。
引用: Yu, Z., Gu, Y., Ren, Y. et al. Hydrogel-based electrodes for high-fidelity sEMG acquisition and robotic hand control. Microsyst Nanoeng 12, 107 (2026). https://doi.org/10.1038/s41378-026-01219-y
关键词: 水凝胶电极, 表面肌电图, 可穿戴传感器, 手势识别, 机器人手控制