Clear Sky Science · zh
线状形状记忆合金驱动器:建模、设计与控制
能“记住”形状的金属细线
想象一根细金属丝,能够像肌肉一样收缩,悄然弯动机器人的手指、在飞行中重塑机翼,或温柔地挤压衰弱的心脏——而这一切只需对其加热和冷却即可。本文综述了由形状记忆合金(SMA)制成的此类金属丝,解释了它们的工作原理、工程师如何设计与控制它们,以及它们在机器人、航空器、医疗器械和可穿戴技术等领域的现实应用。
智能金属丝如何“活”起来
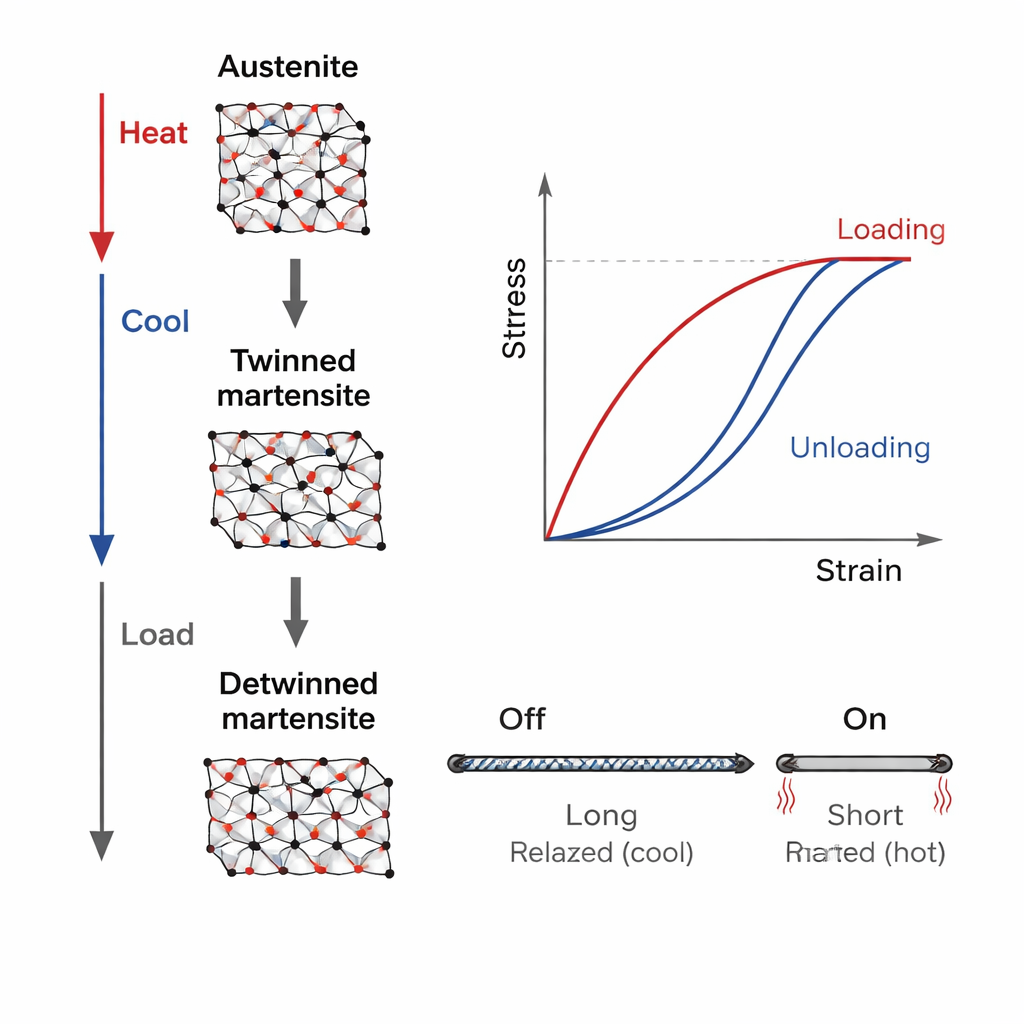
形状记忆合金是特殊金属,能在变形后随着温度变化恢复到预定形状。在一种模式下,称为形状记忆效应,金属丝在较冷且相对柔软时可弯曲;加热后,它会迅速回弹到原始形态。在另一种模式——超弹性中,合金在受载时可以拉伸,卸载后又恢复。金属内部的这种行为源自不同晶体排列之间的固–固相变,使其响应高度非线性且具有一定的可变性。由于SMA丝很细,工程师通常可以将其视为一维元件,简化描述温度、应力、应变与电流如何相互关联的数学模型。
从方程到数据驱动模型
为了可靠地使用这些智能金属丝,设计者需要能够预测其拉力、位移、温度以及电阻变化的模型。经典的“本构”模型将丝视为块体材料,跟踪其内部相随应力和温度变化的演化。这类模型高效但依赖简化假设。与此同时,研究者越来越多地使用机器学习和神经网络直接从实验数据中学习丝的行为,以捕捉细微的滞后和历史效应。另一条重要研究方向考察在通电加热过程中丝的电阻与温度如何演化,从而实现自感知——通过测量电阻而非增加独立传感器来估计力或位移。
构建动作:简单负载、柔性结构与人工肌肉
在硬件方面,论文按照负载类型对基于金属丝的SMA驱动器进行分类。在最简单的“线性负载”配置中,金属丝对抗弹簧或砝码牵引,用于驱动夹具或空间释放机构。更复杂的“非线性负载”系统将金属丝嵌入柔性梁、软聚合物、织物或折纸状结构中,以实现大幅弯曲运动、爬行机器人和编织外骨骼手套。差动配置使用两根或更多对抗的丝,模拟二头肌与三头肌等肌肉对,提供关节(如人工肘和踝)中快速且可逆的运动。由于SMA丝只能缩短约8%,设计中的一个主要主题是行程放大:将长丝绕滑轮缠绕、布置成曲线路径、使用模块化滑动或旋转阶段,或采用SMA弹簧,以在有限空间内获得更大的运动。
教会智能金属丝“服从”
控制这些驱动器具有挑战性,因为它们的响应取决于温度与机械历史。文章回顾了一系列控制策略,从经典的PID控制器到更复杂的方案。基于模型的方法利用基于物理的方程或滞回模型来设计滑模控制器和前馈补偿器,以抵消非线性。神经网络与强化学习控制器更进一步,在没有完美模型的前提下学习如何驱动金属丝以实现精确运动。与此同时,自感知控制方法利用丝的电阻变化作为内置反馈信号,有时与神经网络结合,以在无需笨重外部传感器的情况下估计位置或力。
现实应用与未来方向
线状SMA驱动器已在软体机器人夹爪、微型爬行机器人、可变形机翼、卫星释放装置、植入式泵与支架、心脏辅助环、压缩衣、外骨骼服和康复手套等领域发挥作用。无论在哪个领域,常见的难题仍然存在:冷却慢与热量积聚、长周期疲劳、控制复杂性以及制造成本。作者认为,进展将依赖于三条主线的整合:更好的多尺度与数据增强模型,将SMA与柔性电子和多功能材料结合的更聪明结构设计,以及能在线自适应的智能控制策略。他们设想统一的“建模–设计–控制”框架,在数字孪生与机器学习的支持下对这些方面进行协同优化。对非专业读者来说,信息是:这些会变形的金属丝正从实验室的好奇心成熟为实用的人工肌肉,未来几年有望悄然重塑机器、医疗器械与可穿戴系统。
引用: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
关键词: 形状记忆合金, 软体机器人, 智能驱动器, 变形结构, 可穿戴设备