Clear Sky Science · tr
Beyin Esinli Olasılıksal İşgal Izgarası Haritalaması ve Vektörel Sembolik Mimariler
Dünyayı Yamalı Bir Desen Olarak Gören Robotlar
Her otonom araç, depo robotu veya ev süpürgesi çevresinin hızlı bir zihinsel resmine ihtiyaç duyar: neresi dolu, neresi boş ve neresi hâlâ bilinmiyor. Bu makale, robotların bu resmi—işgal ızgarası haritası olarak adlandırılan—oluşturmasına yönelik yeni bir yol sunuyor; beyinlerin bilgiyi nasıl temsil ediyor olabileceğine dair fikirlerden ödünç alınan bir yaklaşım benimseyerek haritaların doğruluğunu korumayı ve hesaplama açısından çok daha hızlı ve verimli olmayı amaçlıyor.
Ham Sensör İşaretlerini Dünya Haritasına Çevirmek
Robotlar genellikle hareket ederken dünyayı yoklamak için lazer tarayıcılar veya diğer uzaklık sensörleri kullanır; nesnelerin nerede olduğunu ve boş alanların nerede bulunduğunu gösteren nokta bulutları toplarlar. Klasik bir teknik olan işgal ızgarası haritalaması, çevreyi ekran üzerindeki piksellere benzer küçük hücrelere böler ve her birine işgal edilme olasılığı atar. Geleneksel yöntemler bu durumu ağır bir istatistiksel problem gibi ele alır, belirsizliği dikkatle izler ancak çok zaman ve bellek tüketir. Daha yeni sinir ağı yöntemleri daha hızlıdır ve boşlukları doldurabilir, fakat kara kutu gibi davranırlar, güvenlik açısından kritik ortamlarda güvenilmesi zor olabilirler ve genellikle her yeni ortam için yeniden eğitilmek zorundadırlar.
Beyin Esinli Bir Orta Yol
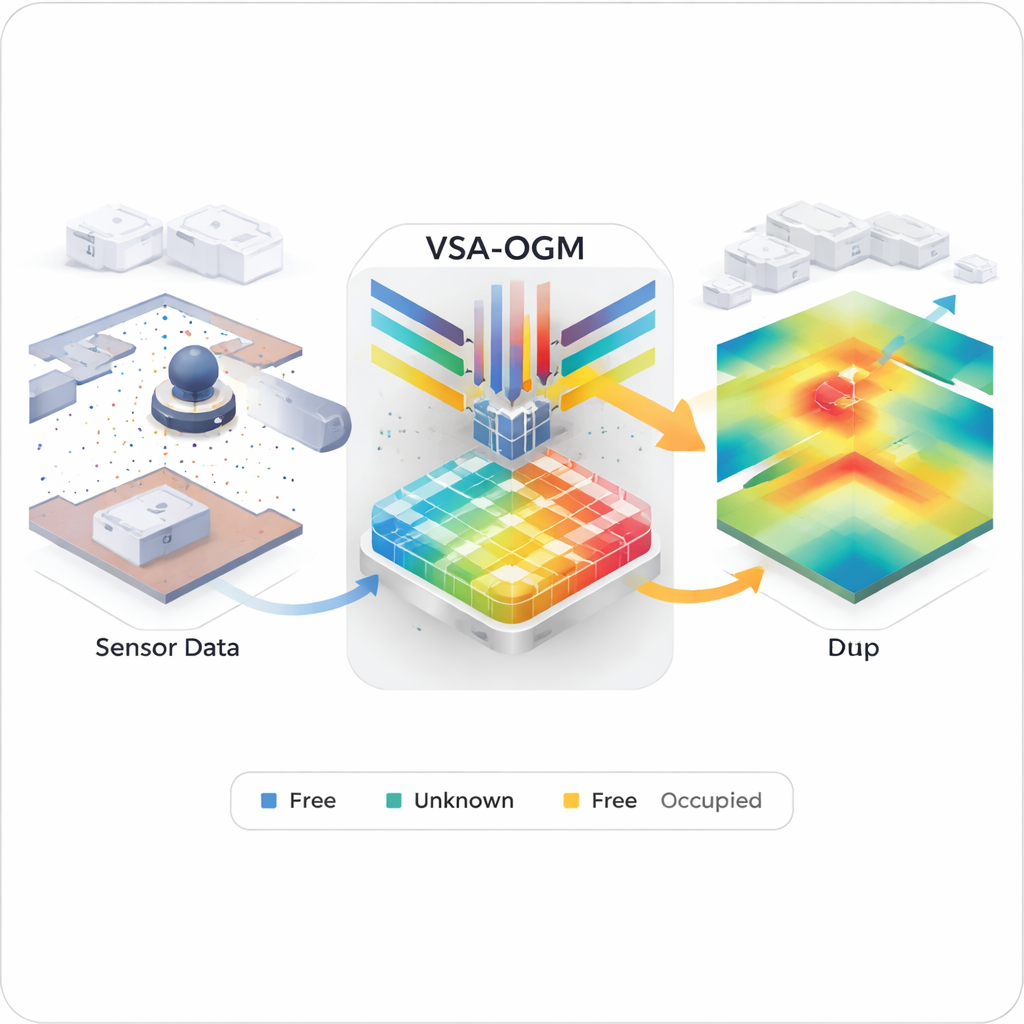
Yazarlar, VSA-OGM olarak adlandırılan, yani Vektörel Sembolik Mimari İşgal Izgarası Haritalaması adlı "nöro-sembolik" bir uzlaşma öneriyorlar. Her detayı yoğun bir ızgarada depolamak veya yapıyı milyonlarca sinir ağı ağırlığının içine gömmek yerine yöntem, sensör okumalarını yüksek boyutlu bir uzaydaki çok uzun vektörler olarak kodluyor—bu, nöron gruplarının kavramları ve konumları nasıl temsil edebileceğine dair teorilerden esinlenen matematiksel bir fikir. Çevre karolara ayrılıyor ve her karonun "işgal" ve "boş" kanıtları için vektör belleği bulunuyor. Robot hareket ettikçe ve nokta bulutları topladıkça, her gözlem bu hiperboyutlu vektörlerden birine dönüştürülüp ilgili karo belleğine paketleniyor ve zaman içinde bilgiyi verimli şekilde biriktiriyor.
Gürültülü Vektörlerden Temiz Haritalara
Elbette birçok sinyali tek bir yüksek boyutlu bellekte birleştirmek, gürültülü ve okunması zor bir karışım oluşturma riski taşır. VSA-OGM bunu dikkatle tasarlanmış bir kod çözme hattı ile ele alır. Önce karo belleklerini uzaydaki konumları temsil eden vektörlerle karşılaştırır ve işgal için kaba "yarı-olasılıklar" üretir. Ardından bir dizi doğrusal olmayan adım ve Shannon entropisi gibi bir bilgi kuramı aracı uygulayarak verinin hangi bölgelerde bir sınıfı diğerine göre kuvvetle desteklediğini ayırt eder. Son olarak, bu sinyalleri gerçek olasılıklara çevirmek için softmax fonksiyonunu kullanır ve bunları "işgal" ile "boş" arasındaki işaretli farkı gösteren nihai bir haritada birleştirir. Sonuç, seyrek ölçülen bölgeler arasında enterpolasyon yapan fakat tamamen olasılıksal ve yorumlanabilir kalan pürüzsüz bir işgal ızgarasıdır.
Tek Bir Robot İçin veya Birkaçına Daha Hızlı Haritalar
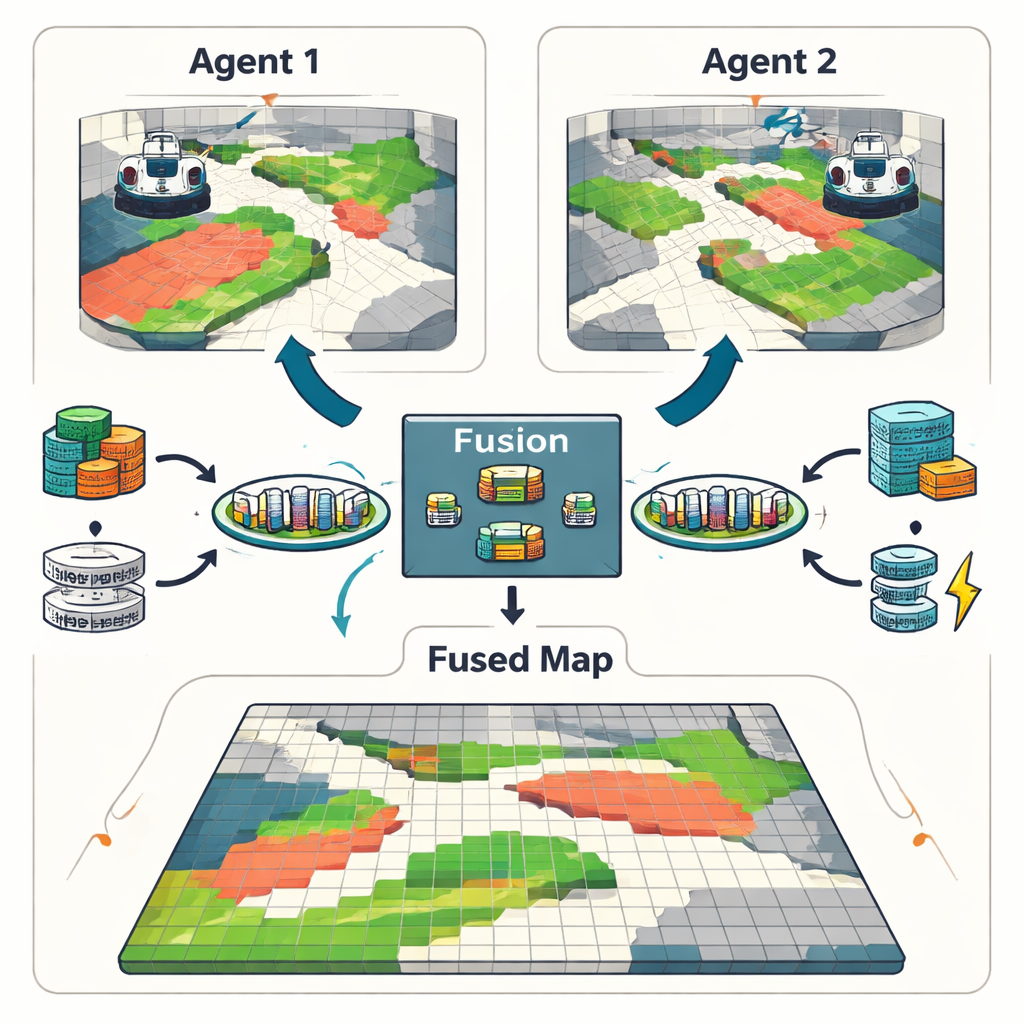
Yaklaşımlarını test etmek için araştırmacılar, klasik bir iç mekan robot haritası ve geniş ölçekli bir sürüş senaryosu da dahil olmak üzere birkaç simüle ve gerçek veri kümesinde VSA-OGM'yi çalıştırdılar. Uzamsal korelasyonları dikkatle modelleyen güçlü geleneksel karşıt yöntemlere karşı, VSA-OGM benzer haritalama doğruluğu elde ederken yaklaşık 400 kat daha az bellek kullandı ve en fazla 45 kata kadar daha hızlı çalıştı. Bazı istatistiksel ayrıntılardan vazgeçen sadeleştirilmiş geleneksel yöntemlerle karşılaştırıldığında bile doğruluğu yakaladı ve gecikmeyi yaklaşık beş kat azalttı. Saatlerce eğitim ve milyonlarca parametre gerektiren bir sinir ağı sistemiyle karşılaştırıldığında, VSA-OGM ön eğitim olmadan karşılaştırılabilir haritalama kalitesi sunarken kare başına işleme süresini altıya kadar azaltabildi. Çerçeve ayrıca çoklu robotları destekliyor: farklı ajanlardan gelen vektör bellekleri basitçe toplanabiliyor ve bilgi kaybı az olan birleştirilmiş haritalar üretebiliyor.
Günlük Robotlar İçin Bunun Anlamı
Basitçe söylemek gerekirse, bu çalışma robotların dünyayı haritalarken yavaş ama güvenilir matematiği ile hızlı ama opak sinir ağları arasında seçim yapmak zorunda olmadığını gösteriyor. Beyin esinli yüksek boyutlu vektörleri kullanarak VSA-OGM, klasik yöntemlerin açık olasılıksal yapısını korurken sınırlı donanımda gerçek zamanlı çalışmaya uygun hız ve verimliliğe ulaşıyor. Hâlâ çok düzensiz verilerle başa çıkma ve çok yoğun ortamlar gibi zorluklar var, ancak yaklaşım mütevazı yerleşik bilgisayarlarda çalışırken bile çevrelerini güvenli ve güvenilir şekilde anlayabilen geleceğin robotlarına işaret ediyor.
Atıf: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
Anahtar kelimeler: işgal ızgarası haritalaması, otonom robotlar, vektörel sembolik mimariler, olasılıksal haritalama, LiDAR algılama