Clear Sky Science · tr
Çatlama temelli kavrama: dinamik darbeler tatlısu buzuna öngörülebilir robotik çapa sağlar
Yerçekiminin Neredeyse Yok Olduğu Yerlerde Tırmanmak
Kendi ağırlığınızın bile botlarınızı yüzeye bastırmaya yetmediği kadar zayıf bir yerçekimine sahip donmuş bir kayayı tırmanmaya çalıştığınızı hayal edin. Bu, Saturn’ün uydusu Enceladus gibi buzlu uydulara gönderilecek gelecekteki robotların karşılaştığı zorluktur; bilim insanları burada derin buz menfezlerinde ve mağaralarda yaşam izleri aramayı umuyor. Bu makale, robotların dağcıların buz baltasından ilham alarak hızlı, çekiç benzeri darbeler ve sıkı bir sıkıştırma kullanarak buza tutunmasını sağlayan yeni bir yöntemi tanımlıyor. Sonuç, bugünün buz vidaları veya ısıtmalı kazıyıcılarından çok daha az kuvvet ve enerji kullanan, böylece daha önce ulaşılamayan buzlu dünyaları daha erişilebilir kılma potansiyeli taşıyan hafif bir çapa sistemi.

Buz Tutunmasının Neden Bu Kadar Zor Olduğu
Dünya’da bir dağcı, buz vidası ya da balta içine tam ağırlığını yaslayarak yüzeye batmasını sağlayabilir. Enceladus’ta yerçekimi Dünya’nın sadece yaklaşık yüzde biri olduğundan, bir robot aletleri buza itmek için ağırlığına güvenemez. Mevcut seçeneklerin her birinin büyük dezavantajları var. Buz vidaları yüzeye girmeye başlamak için büyük itme kuvvetleri gerektirir—öyle ki Enceladus’ta etkili olmak için bir robotun büyük bir Mars gezgininin ağırlığında olması gerekebilir. Isıtmalı “termal kazıyıcılar” çok az itme gerektirerek yerlerine eriyerek girse de, her kullanımda muazzam miktarda enerji tüketirler; bu, Güneş’ten uzak çalışan uzay araçları için ciddi bir sınırlamadır. Aynı zamanda, birçok modern tırmanma robotu pürüzlü kaya yüzeylerine, vakuma veya özel yapıştırıcılara dayanır; bunların hepsi doğal buzul buzunda bulunan pürüzsüz ama dalgalı şekillerle mücadele eder.
İnsan Buz Tırmanıcılarından Bir Hile Ödünç Almak
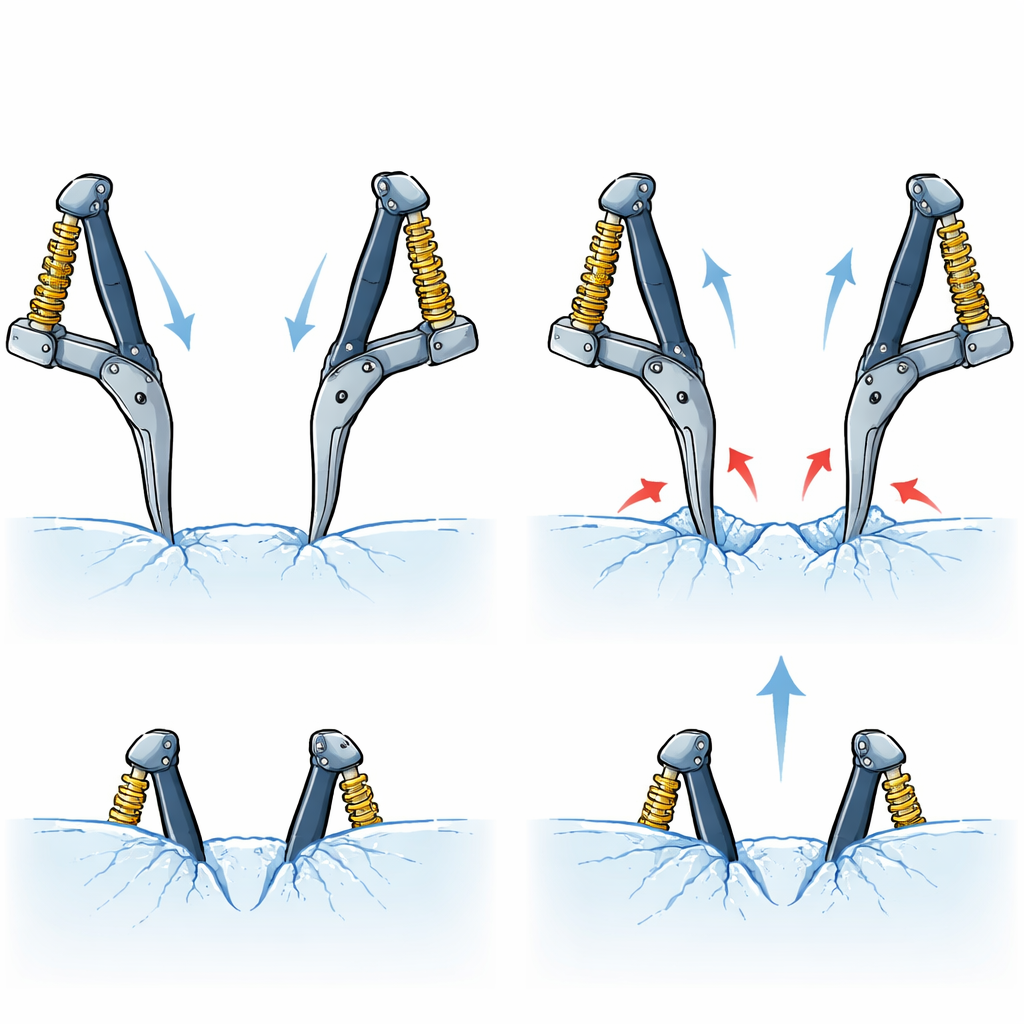
Yazarlar farklı bir strateji öneriyor: buz yüzeyine uyum sağlamaya çalışmak yerine kendi kavrama noktalarınızı yaratın. Cihazları, kompakt bir kavrayıcıya monte edilmiş iki küçük buz baltası kullanır. Önce, kollardaki yaylar gerilir ve makul miktarda mekanik enerji depolanır. Serbest bırakıldığında, baltalar minyatür çekiçler gibi sallanır ve buza çarparak küçük çukurlar çıkarır. Ardından aynı mekanizma, uçları yeni çukurlara kanca atacak şekilde baltaları birbirine doğru sıkar. Bu iki aşamalı süreç—darbenin ardından kavrama—düz bir buz parçasını robotun tutunabileceği bir şeye dönüştürür ve robotun başka bir “adım” atabilmesi için tersine çevrilebilir. Tüm döngü, hem yayları kuran hem de kavramayı sıkıştıran tek bir motor tarafından çalıştırılır.
Kavramanın Arkasındaki Fiziksel İlkeleri Test Etmek
Bu yaklaşımın güvenilir çalışacağından emin olmak için ekip, balta uçlarının ne kadar derine gireceği ve çarpışmadan sonra ne kadar geri sekebileceğine dair matematiksel modeller oluşturdu. Ardından tek baltaların sarkaç gibi sallanarak tipik buzul sıcaklıklarına soğutulmuş tatlısu buz bloklarına çarpması şeklinde deneyler yaptılar. Teori ile deneyi karşılaştırarak, modellerinin bir çukurun ne kadar derin oluşacağını öngörebildiğini ve bıçağın geri sıçradığında ortaya çıkan “tepki” enerjisini tahmin edebildiğini buldular. Bu sonuçları kullanarak, baltaların çukurlardan sıçramak yerine yerinde kalmasını sağlamak için robotun kavrayıcıyı buz yüzeyine ne kadar bastırması gerektiğini hesapladılar. Seçtikleri yay enerjisi için model, yaklaşık 16 newtonluk bir itmenin—Dünya’da birkaç litre suyun ağırlığına yaklaşık—neredeyse kesin başarı sağlayacağını öngördü.
Laboratuvardan Buzul Duvarına
Modeller hazırken araştırmacılar çift baltalı kavrayıcıyı tam halde test ettiler. Laboratuvarda, 8 joul depolanan yay enerjisi ile yapılan darbelerin yeterince derin çukurlar oluşturabildiğini ve buz vidalarından çok daha az ilk itme gerektirdiğini ve termal çapalardan çok daha az enerji tükettiğini doğruladılar. Ardından cihazı buzdan doğruca çekerek nihai kavramanın ne kadar güçlü olduğunu ölçtüler. Baltaların birbirine ne kadar sıkıştırıldığı ayarlanarak kavramanın iki şekilde başarısız olabileceği keşfedildi: düşük sıkıştırmada uçlar çukurlardan kaydı; çok yüksek sıkıştırmada ise buzun kenarları kendinden koptu. Bu uçlar arasında, kavrayıcının kendi ağırlığının iki katından fazlasını taşıyabildiği bir ideal aralık bulundu. Fransız bir buzulunda yapılan saha testleri, cihazın dik, doğal buza, sert kar tabakasına ve hatta ağaç gövdelerine, kayalara ve sıkışmış sert toprağa tutunabildiğini göstererek darbe ve kavrama yönteminin laboratuvar dışına taşındığını doğruladı.
Gelecek Kaşifler İçin Anlamı
Çalışma, buz kırma ve sıkıştırmanın robotların sert, düşük yerçekimli ortamlarda tırmanması ve sabit durması için son derece verimli bir yol olabileceğini gösteriyor. Buz kırmanın eritmekten çok daha az enerji gerektirdiği gerçeğinden yararlanarak, çift baltalı kavrayıcı her adım için mütevazı kuvvetler ve sadece birkaç joul enerji kullanarak güçlü, tersinir çapalar oluşturur. Enceladus veya diğer buzlu dünyalara yapılacak görevler için böyle bir sistem, küçük, enerji sınırlı robotların menfezlere güvenle inmelerine ya da örnek almak için uçurum duvarlarına asılmalarına izin verebilir; bu örnekler Dünya dışında yaşam olup olmadığını açığa çıkarabilir. Aynı fikir, İnsan tırmanıcılar için çok tehlikeli veya erişilemez olan buzulların, buz mağaralarının ve gevrek kaya yüzlerinin keşfinde Dünya tabanlı robotlara da yardımcı olabilir.
Atıf: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
Anahtar kelimeler: robotik buz tırmanışı, gezegensel keşif, robotik kavrayıcılar, buz kırılma çapa, Enceladus görevleri