Clear Sky Science · tr
Kinodinamik olarak agresif manevralara izin veren somut çok ajanlı yol planlaması
Trafikte Dans Edebilen Robotlar
Bir depoda onlarca uçan ve kara robotun çarpışmadan birbirlerinin etrafından geçip işleri insan sürücülerden daha hızlı tamamladığını hayal edin. Bu makale, birçok makinenin dar alanlarda agresif ve hızlı hareket ederken güvenli kalmasını sağlayacak yeni bir “trafik” düzenleme yöntemini anlatıyor. Bu çalışma önem taşıyor çünkü aynı fikirler bir gün fabrikalarda, depolarda ve sürekli çalışmak zorunda olan teslimat hizmetlerinde robot filolarını yönlendirebilir.
Birçok Robotu Yönlendirmenin Neden Bu Kadar Zor Olduğu
Bir grup robotu koordine etmek, tek bir robotu yönlendirmekten çok daha zordur. Her robot başlangıç noktasından hedefine çarpışmadan, diğerlerini engellemeden veya sonsuz döngülere takılmadan ulaşmak zorundadır. Bugünün yaklaşımları genellikle iki uçta yer alır. Bazı yöntemler robotları bir ızgara üzerindeki oyun taşları gibi ele alır; bu, yüzlercesi için planlamayı hızlı ve matematiksel olarak düzenli hale getirir—ancak ortaya çıkan yollar genellikle gerçek makinelerin nasıl hareket ettiğini, hızlanıp yavaşladığını veya döndüğünü göz önüne almaz. Diğer yöntemler tam fiziksel hareketi simüle eder ve güzel, pürüzsüz yollar üretir, ama robot sayısı birkaçın ötesine geçtiğinde acı verici şekilde yavaş veya güvenilmez hale gelir.
Orta Yol: “Somut” Planlama
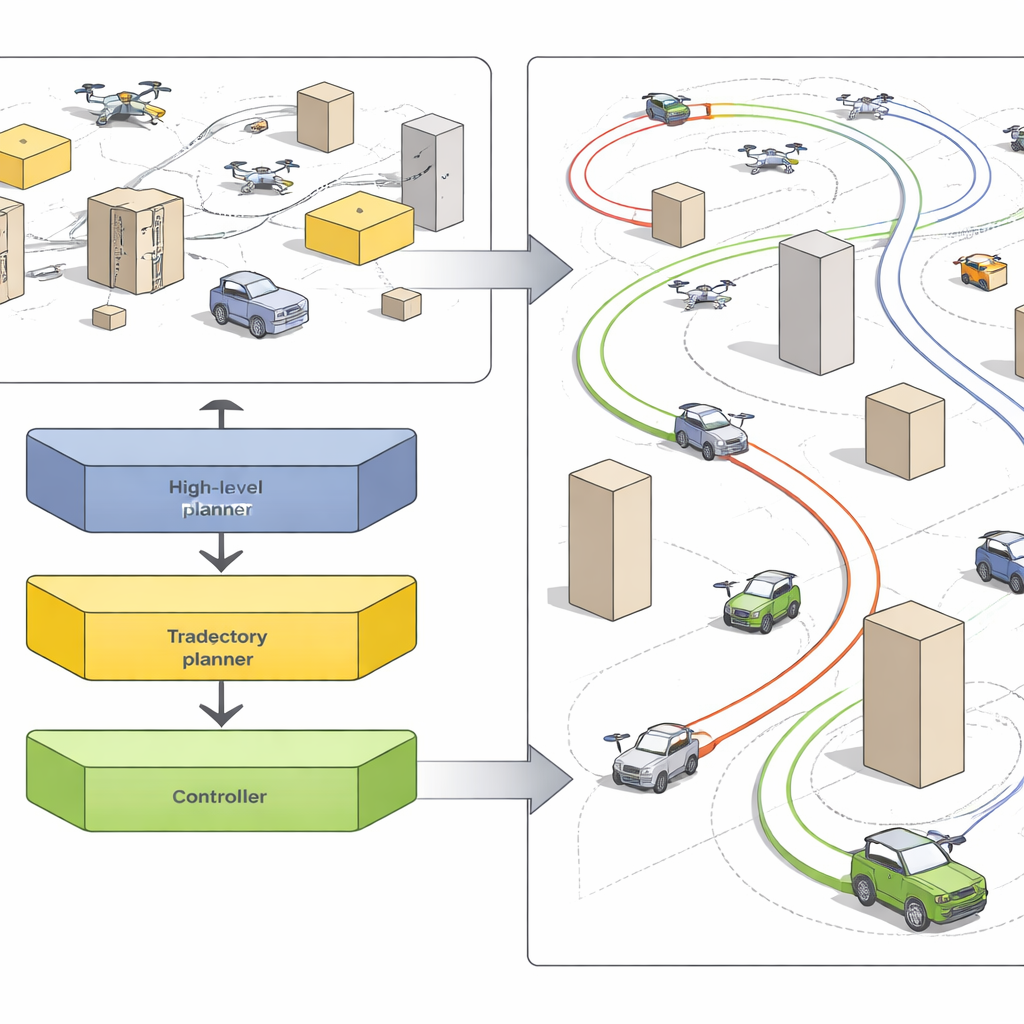
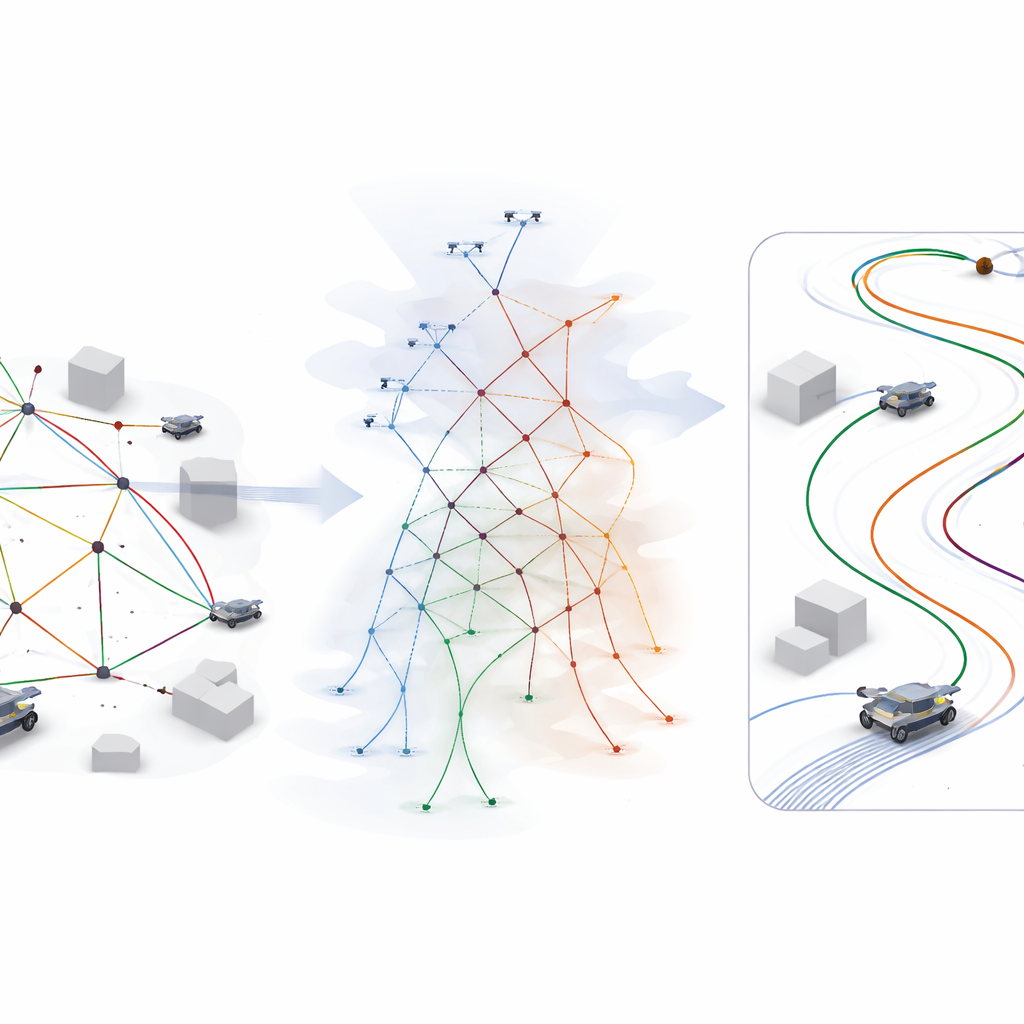
Yazarlar buna “somut” çok ajanlı yol planlaması adını verdikleri hibrit bir strateji öneriyor. Fikir, ızgara tarzı planlamanın net yapısını robotların gerçekte nasıl hareket ettiğinin gerçekçi bir resmiyle harmanlamak. Sistemde tamamen soyut bir ızgarada veya tamamen sürekli fizikte çalışmak yerine katmanlı bir hareket tanımı kullanılıyor. Merkezi bir planlayıcı tüm robotlar için aynı anda olası ayrık hareketler seti üzerinde arama yapıyor, fakat her hareket ne kadar süreceği, robotun hedef çizgisinden nasıl sapabileceği ve başkalarına ne kadar yakın güvenle geçebileceği gibi öngörülerle zenginleştiriliyor. Bu öngörüler gerçek robot deneyleriyle eğitilmiş veri odaklı modellerden geliyor, böylece planlayıcı filonun pratikte nasıl davrandığını “biliyor”.
Kabataslak Taslaklardan Kesin Hareketlere
Bağlı planlayıcı her robot için güvenli, çatışmasız yol noktası dizileri ürettikten sonra çerçeve detaylara iniyor. İkinci bir modül her kaba yolu itme, yönlendirme ve diğer fiziksel sınırları gözeten yoğun, pürüzsüz bir yörüngeye dönüştürüyor. Bunu hızlı yapmak için yazarlar önce çevrimdışı olarak ağır sayısal optimizasyon kullanıp zaman açısından neredeyse optimal harekete birçok örnek ürettiler, sonra bu örnekleri taklit etmek üzere transformer tabanlı sinir ağları eğittiler. Çalışma zamanında bu ağlar milisaniyeden daha kısa sürede yüksek kaliteli referans yollar üretebiliyor. Üçüncü bir katman olan model öngörülü denetleyici ise bir güvenlik filtresiyle donatılmış şekilde bu referansları takip etmek için sürekli kontrolleri ayarlıyor ve yerel algılama ile dolaşan bir engel veya küçük takip hatası gibi sürprizleri savuşturuyor.
Kırk Robotu Teste Sokmak
Ekip, sistemlerini 20 quadrotor drone, 8 kara robotu ve hareket eden engeller olarak davranan 12 robottan oluşan karma bir filo ile, hepsinin birlikte çalıştığı oda büyüklüğünde bir iç mekânda gösterdi. Deneylerin birinde drone sürüleri dar alanlarda saniyede beş metrenin üzerinde tepe hızlarda birbirlerinden kaçınarak üç boyutlu bir bale gibiydi. Bir diğerinde kara robotları rastgele hareket eden engellerle dolu bir alanı tekrar tekrar geçti; rekabetçi yöntemlere göre daha fazla görev tamamladılar, daha az durdular ve çarpışma yaşanmadı. En zorlu denemeler tüm 40 robotun ardışık görevler çalıştırdığı, sistemin talep üzerine sürekli yeniden planlama yaptığı ve kilitlenme ya da çarpışma olmadığı senaryolardı.
Gelecekteki Teslimat ve Depo Sistemlerine İşaretler
Bunun gerçek dünyadaki görevlere nasıl dönüşebileceğini göstermek için yazarlar sahte “son mil” teslimatları ve depo operasyonları sahnelediler. Teslimat senaryosunda kara robotları dronları bir “nehir kıyısına” taşıdı; dronlar havalandı, dağınık bırakma noktalarına uçtu, mobil üslerine geri döndü ve sonra başlangıç alanına geri taşındılar—hepsi hareket eden engellerden kaçınırken. Depo gösteriminde ise drone ekipleri sanal paketleri raflar ile teslimat bölgeleri arasında tekrar tekrar taşıyarak yoğun, çevik hareket ve yüksek verimlilik sağladı. Bu vaka çalışmaları çerçeveyi sadece küçük ayarlamalarla kullanabildiklerini gösterdi ve yeni platformlara ve görevlere uyum sağlama yeteneğini vurguladı.
İleriye Dönük Anlamı
Basitçe söylemek gerekirse, bu çalışma hızlı üst düzey planlama, gerçekçi hareket modelleri ve son çare güvenlik kontrollerini dikkatle birleştirerek büyük robot takımlarının dar ve değişen alanlarda cesur ve güvenli hareket edebileceğini gösteriyor. “Somut” yaklaşım soyut planları gerçek makinelerin hızla uygulayabileceği hareketlere dönüştürüyor ve birçok pratik durumda çarpışma ve kilitlenmelere karşı garantiler sunuyor. Aşırı kaotik ortamlar ve tamamen bilinmeyen alanlar hâlâ zorluklar barındırsa da, bu çerçeve teslimat dronları, depo araçları ve diğer robot işçilerin yoğun ortamlarda sürekli insan gözetimi olmadan birlikte çalışabileceği bir geleceğe işaret ediyor.
Atıf: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
Anahtar kelimeler: çoklu-robot koordinasyonu, yol planlaması, robot sürüleri, depo otomasyonu, drone teslimatı