Clear Sky Science · tr
Tüm gözler, IMU yok: yalnızca görselle uçuş tutumunu öğrenmek
Böcek Gibi Görmek
Küçük uçan robotlar genellikle kendilerini dik tutmak için iç kulak görevi gören minik hareket sensörlerine dayanır. Oysa böcekler çok daha basit donanımla çevik uçuşu başarır; büyük ölçüde gördüklerine güvenirler. Bu çalışma, bir dronun benzer bir şeyi yapabileceğini gösteriyor: sıradan hareket sensörleri olmadan, yalnızca özel bir kamera ve kompakt bir yapay zeka kullanarak kararlı bir şekilde uçmak. Bu değişim, geleceğin avuç içi büyüklüğündeki ve böcek ölçeğindeki dronlarını daha hafif, daha ucuz ve daha dayanıklı hale getirebilir.
Neden Geleneksel Sensörlerden Kurtulalım?
Tutum kontrolü—bir dronun yerçekimine göre doğru eğimini koruması—genellikle ivmelenme ve dönme ölçen bir birimle sağlanır. Bu ataletsel sensörler iyi çalışır, fakat ağırlık ekler, güç tüketir ve tek bir arıza noktası oluşturabilir. Buna karşılık birçok uçan böcek özel bir yerçekimi sensörüne sahip değildir; yerine çevrenin gözlerinin üzerinde nasıl hareket ettiğinden eğimleri çıkarırlar. Robotlar bu hileyi kopyalayabilseydi, çok küçük uçucular görme ve denge için yalnızca görmeye ihtiyaç duyabilir, tasarımlarını basitleştirir ve böcek boyutuna küçültmeyi kolaylaştırırdı.
Sadece Değişimi Gören Bir Kamera
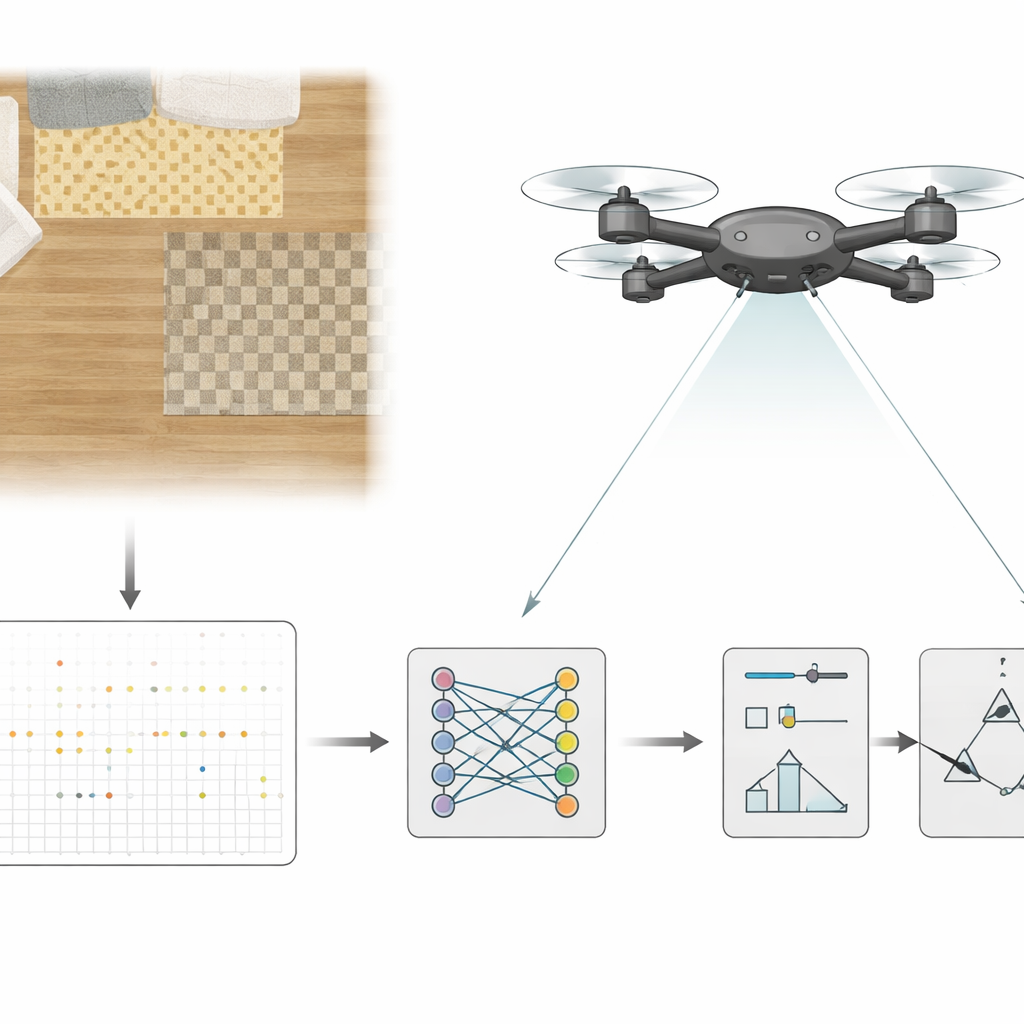
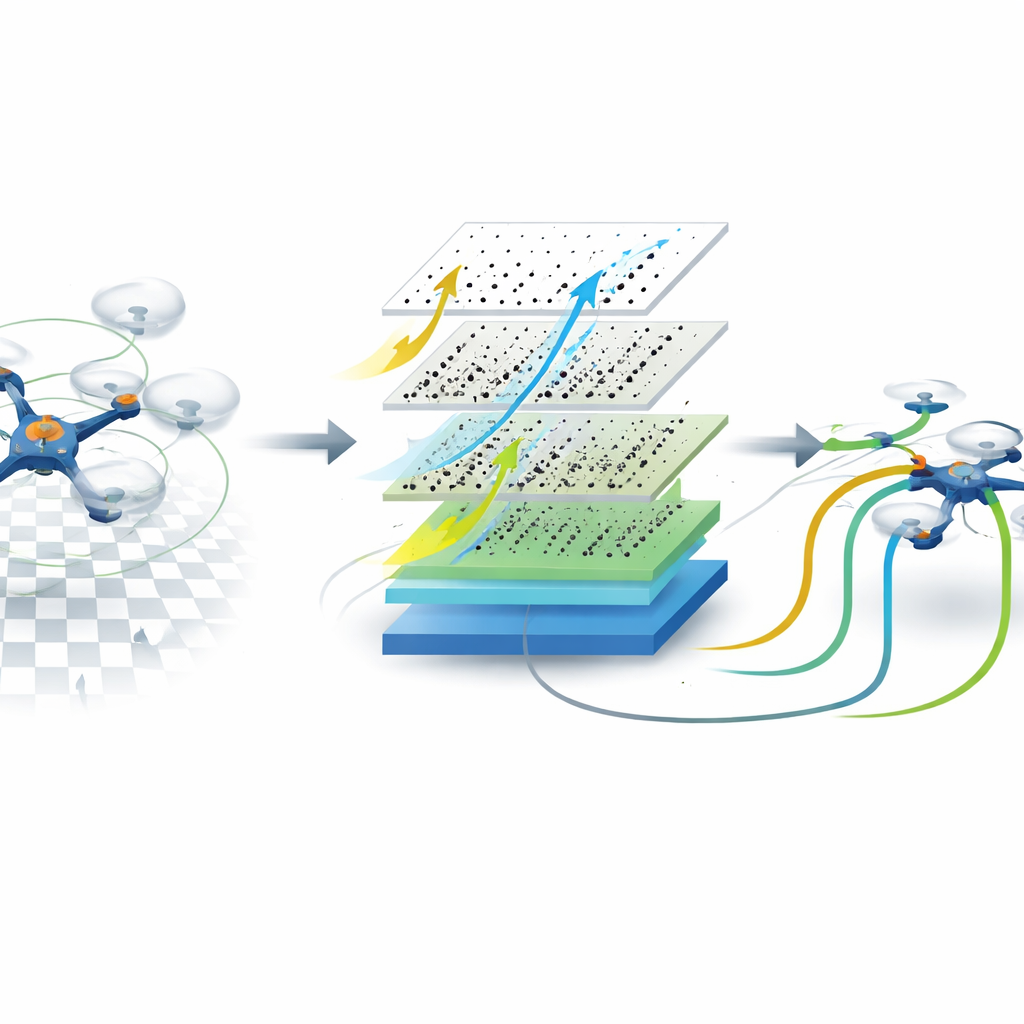
Araştırmacılar standart bir video kamerası yerine, dronun altına yönlendirilmiş olay tabanlı bir kamera kullanıyor. Bu sensör sabit aralıklarla tam görüntüler göndermek yerine, her pikseldeki küçük parlaklık değişikliklerini bildirir ve bunu son derece hızlı yapar. Olay akışı, her biri yalnızca beş binde bir saniyeyi kapsayan kısa dilimlere paketlenir ve bu dilimler, yerleşik bir grafik çipinde çalışan küçük bir yinelemeli konvolüsyonel sinir ağına verilir. Zaman içinde ağ, görsel değişim desenlerini dronun eğimi ve dönme hızına ilişkin tahminlere dönüştürmeyi öğrenir; böylece kontrol döngüsündeki geleneksel hareket biriminin yerini alır.
Bir Dronu Yalnızca Görüşle Dengelemeyi Öğretmek
Bu yapay zekâyı eğitmek için ekip önce dört rotorlu uçaklarını iç mekân bir arenada geleneksel sensör setini kullanırken uçurdu. Bu uçuşlar sırasında kameradan gelen olay akışını ve standart denetleyicinin tahmin ettiği eğim ve dönme değerlerini kaydettiler. Daha sonra ağı, görsel verilerden yalnızca bu değerleri yeniden üretmesi için denetimli öğrenme altında eğittiler. Daha sonraki testlerde roller tersine döndü: ağın tahminleri kontrol döngüsünü kapatırken, bağımsız hareket yakalama ya da yerleşik ölçümler yalnızca performansı ölçmek için kullanıldı. Sistem, dronu birkaç dakika boyunca havada tutmaya ve pilotun komut verdiği yolları izlemeye devam etti; çoğu eğim hatası birkaç derece içinde ve dönme hataları de kararlı uçuş için kabul edilebilir sınırlardaydı.
Öğrenilmiş Görsel Beceriye İçeriden Bakmak
Araştırmacılar, bu yalnızca görsele dayalı kontrolün en iyi şekilde çalışmasını sağlayan etkenleri incelediler. Farklı ağ tasarımlarını karşılaştırdılar, motor hızları veya jiroskop sinyalleri gibi ek girdiler ekleyip çıkardılar ve kameranın görüş alanının ne kadarının kullanıldığını değiştirdiler. Zaman içinde görsel bilgiyi bütünleştirebilen hafızalı ağlar, hızlı rotasyonları doğru takip etmek için kritik idi; hafıza olmayan versiyonlar zorlandı. Uzak ufuk benzeri ipuçlarını görüntü kenarlarında ortaya çıkaran geniş bir görüş alanı, tanıdık sahnelerde en düşük ham hataları verdi. Ancak şaşırtıcı şekilde, ağı yalnızca görüntünün merkezine bakmaya zorlamak—burada bu tür statik ipuçları yoktur—sistemin sahne görünümünden ziyade hareket desenlerine dayanmasını sağladı. Bu mutlak doğruluğu azaltmasına karşın, sistem çok farklı ortamlara taşındığında daha zarif bir uyum göstererek dahili bir hareket hissinin öğrenildiğini düşündürdü.
Küçük, Görüş-Öncelikli Uçan Robotlara Doğru
Genel olarak, çalışma bir dronun döngüde hiçbir ataletsel sensör olmadan yalnızca gördükleriyle dik ve kontrol edilebilir kalabileceğini gösteriyor. Olay kamerasını kompakt bir sinir ağıyla eşleştirerek sistem, gerçek zamanlı kontrol için gereken hız ve tepki kabiliyetine ulaşırken donanım ağırlığını ve karmaşıklığını azaltıyor. Günlük okuyucu için temel mesaj, gelecekteki küçük, böcek benzeri uçan robot sürülerinin tıpkı böcekler gibi tek bir akıllı göz kullanarak denge ve gezinme sağlayabileceği; bu da daha hafif, daha enerji verimli makinelerin karmaşık, öngörülemeyen alanları güvenle keşfetmesine kapı açıyor.
Atıf: Hagenaars, J.J., Stroobants, S., Bohté, S.M. et al. All eyes, no IMU: learning flight attitude from vision alone. npj Robot 4, 21 (2026). https://doi.org/10.1038/s44182-026-00081-4
Anahtar kelimeler: görünüme dayalı uçuş kontrolü, olay kameralı dronlar, biyo-ilhamlı robotik, sinir ağlı denetleyiciler, böcek ölçekli İHA'lar