Clear Sky Science · tr
Kokusal algı eksikliğine karşı böcek esinli uyarlanabilir davranış telafi stratejisiyle robotik koku kaynağı yer bulma
Sensörü Kaybetmek İzden Vazgeçmek Demek Değildir
Bir arama-kurtarma robotunu gaz kaçağını ya da çökmüş bir binada mahsur kalmış bir kişiyi kokusuyla tespit etmeye çalışırken hayal edin—ve sonra kilit sensörlerinden biri bozuluyor. Bugünün robotları bu tür hasarlarda sıkça başarısız olur. Bu çalışma, kokuya dayalı navigasyonda şaşırtıcı bir uzman olan erkek ipek böceğinden (Bombyx mori) ilham alıyor: hayvanların “burunlarının” yarısını kaybettikten sonra bile koku kaynağını nasıl izleyebildiklerini ve bu stratejinin dört ayaklı robotlara nasıl kopyalanabileceğini gösteriyor.
Güçlü Bir Koku Duyusuna Sahip Minik Bir Gezgin
Böceklerden köpeklere kadar birçok hayvan, yiyecek, eş veya güvenli sığınak bulmak için havadaki kimyasal sinyalleri kullanır. Görüşün karanlık, duman veya enkaz nedeniyle engellendiği durumlarda kokular özellikle kullanışlıdır. Ancak gerçek koku sütunları karışıktır: rüzgâr yön değiştirir, binalar ve ağaçlar akımı büker ve en güçlü koku her zaman kaynağın tam rüzgâr yukarısında olmaz. Çoğu koku arayan robot, tüm koku sensörlerinin kusursuz çalıştığını ve koku ile rüzgâr yönlerinin düzgünce hizalandığını varsayar. Doğada bu varsayımların hiçbiri geçerli değildir. İpek böceği Bombyx mori bu duruma doğal bir karşı örnek sunar: erkekler türdeş feromon yayını yapan dişileri dalgalı havada bile bulabilir ve ilginç şekilde iki antenlerinden—esas koku organlarından—birini kaybettiklerinde bile yön bulmayı sürdürebilirler.
Anteni Kaybettikten Sonra Güveler Nasıl Başa Çıkıyor?
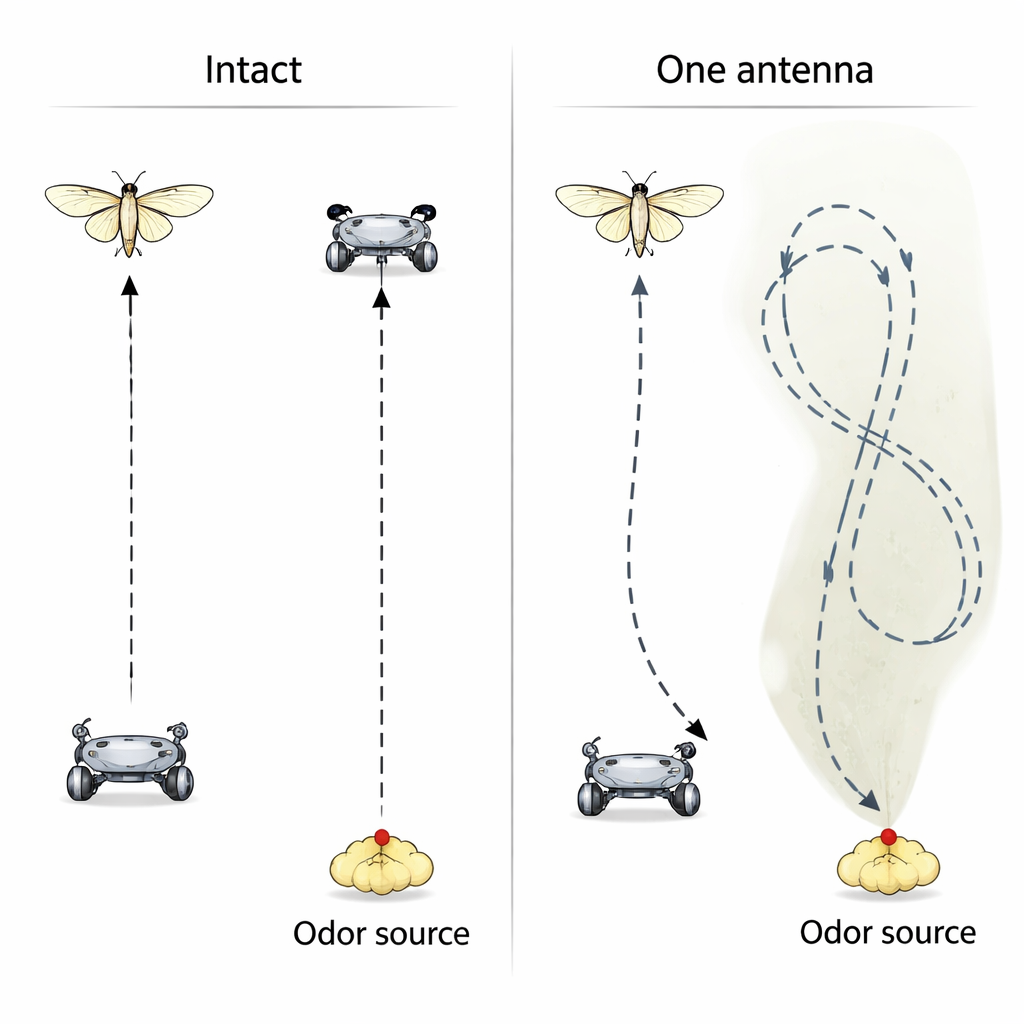
Araştırmacılar önce laboratuvarda sağlam erkek ipek böceklerinin ve sol anteni alınmış böceklerin bir koku kaynağına yürüme başarılarını test ettiler. Her iki grup da feromon veren noktadan 15 santimetre uzaklıktan başlamıştı. Şaşırtıcı biçimde, başarı oranı—kaynağa bir dakika içinde ulaşma—bir anten alındıktan sonra anlamlı biçimde düşmedi. Değişen şey yoldu: sağlam böcekler nispeten düz bir rota izleme eğilimindeyken, tek antenli böcekler daha uzun, dolambaçlı yollarla kalan anten tarafına doğru kıvrıldılar. Baş hareketlerinin ayrıntılı ölçümleri, böceklerin koku algısının antenin tabanına mı yoksa ucuna mı yakın olduğuna ve o anda hangi yöne döndüklerine bağlı olarak dönüş stratejilerini değiştirdiklerini ortaya koydu.
Karmaşık Davranışta Saklı İki Basit Kural
Takım, kokuyu soldan ve sağdan tekrarlayan puflar halinde verip böceklerin baş açılarının izini sürerek davranışı, her puf sonrası böceğin sola veya sağa dönme olasılığını gösteren olasılık eğrilerine dönüştürdü. Koku antenin tabanına yakın düştüğünde, böcek aynı tarafa dönmeye devam etmeyi kuvvetle tercih etti ve mevcut dönüşü takip etme taahhüdünde bulundu. Koku uç kısmına yakın olduğunda ise seçim daha dengeliydi ve zıt tarafı keşfetmeye yönelik hafif bir eğilim görüldü. Basitçe söylemek gerekirse, anten kaybı böceği vazgeçiren bir durum yaratmadı; böcek, özellikle koku yoğunluğunun hızlı değiştiği koku sütununun “kenarı” boyunca her iki tarafı daha geniş biçimde örnekleyen bir arama modeline geçti.
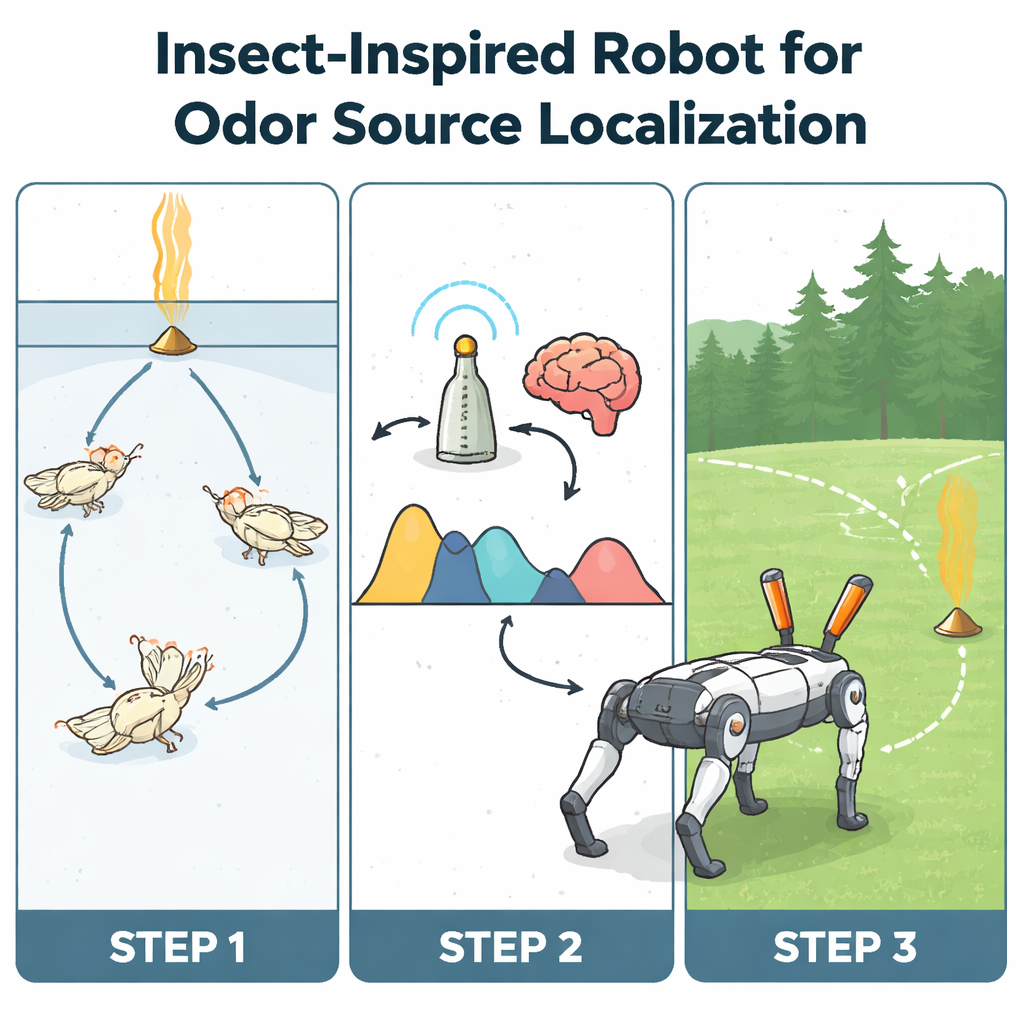
Bir Dört Ayaklı Robota Böcek Gibi Koklamayı Öğretmek
Bir sonraki adımda araştırmacılar, antenin tabanından ucuna doğru uzanan yapısını taklit etmek için “baş”ına koku algılayıcılar yerleştirilmiş bir dört ayaklı robot inşa ettiler. İki arama algoritması oluşturdular. İlki, SZL (surge–zigzag–loop) olarak adlandırılan standart böcek-esinli yaklaşımdı; bu yaklaşım iki çalışan koku sensörünü varsayar ve sağ-sol algılamaların göreli zamanlamasından düz “ilerleme” (surge) yönünü seçer. İkincisi, bağlama bağımlı böcek-esinli (CDMI) adını taşıyordu ve yeni böcek kurallarını içeriyordu: kalan sensör boyunca kokunun nerede algılandığını tahmin eder ve hayvan deneylerinden türetilen olasılık eğrilerini hangi yöne ve ne kadar keskin döneceğine karar vermek için kullanır. İç mekân testlerinde, her iki sensör sağlam olduğunda SZL en iyi sonucu vererek hızlı ve nispeten düz yollar sağladı. Ancak bir sensör devre dışı bırakıldığında CDMI, koku alanının değişen kenarını takip ederek kaynak bulmada açıkça SZL’den daha başarılı oldu; rotalar, tek antenli böceklerin döngüsel seyirlerine benzer şekildeydi.
Arızalandığında Bile Akıllı Kalan Robotlar
Fikri daha ileri taşımak için ekip robotlarını doğal rüzgâr ve türbülansın koku sütunlarını yamalı hale getirdiği dış mekânda test etti. Sağlam robota geleneksel SZL algoritması verilmişken “tek sensörlü” robota CDMI verildi. Her iki robot da benzer başarı oranlarına ulaştı, ancak böcek esinli uyarlanabilir stratejiyi kullanan hasarlı robot çoğu kez daha kısa, daha az dolaşan yollarla kaynağı buldu. Bu, zorlu, gerçek dünya koşullarında hassas ama kırılgan bir algılama şemasından daha keşifçi, kenar-takipçi bir stratejiye geçmenin aslında daha iyi olabileceğini düşündürür. Daha geniş mesaj şu: sağlam navigasyon için giderek daha karmaşık yapay zekâlara gerek yok. Bunun yerine, sensörlerin beden üzerinde nasıl düzenlendiğine ve bedenin çevresiyle nasıl etkileştiğine bağlı, biyolojik olarak temellendirilmiş basit kurallar; kilit parçalar arızalansa bile çalışmaya devam eden robotlar yaratmaya yardımcı olabilir—uzun süreli keşif ve kurtarma görevleri için kritik bir özellik.
Atıf: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
Anahtar kelimeler: olfaktör navigasyon, biyoesinli robotik, koku kaynağı yer bulma, böcek esinli yapay zeka, bedenselleşmiş zekâ