Clear Sky Science · tr
Dokunsal tepkili, ustalık gerektiren manipülasyon için aktif avuçlu kavrayıcı
Elindekini Hisseden Robotlar
Olgun bir çileği nazikçe koparan, çocuk kilitli bir şişeyi bükerek açan ya da tavandaki bir ampulü söküp takan—hepsini ezmeden, düşürmeden veya hizayı bozmeden başaran bir robotu hayal edin. Bu makale, robotlara yalnızca akıllı parmaklar değil aynı zamanda aktif ve yüksek hassasiyetli bir avuç sağlayarak makineleri bu tür dikkatli, insan benzeri el becerisine yaklaştıran yeni bir robotik kavrayıcıyı anlatıyor.
Sadece Tutmaktan Fazlasını Yapan Bir Avuç
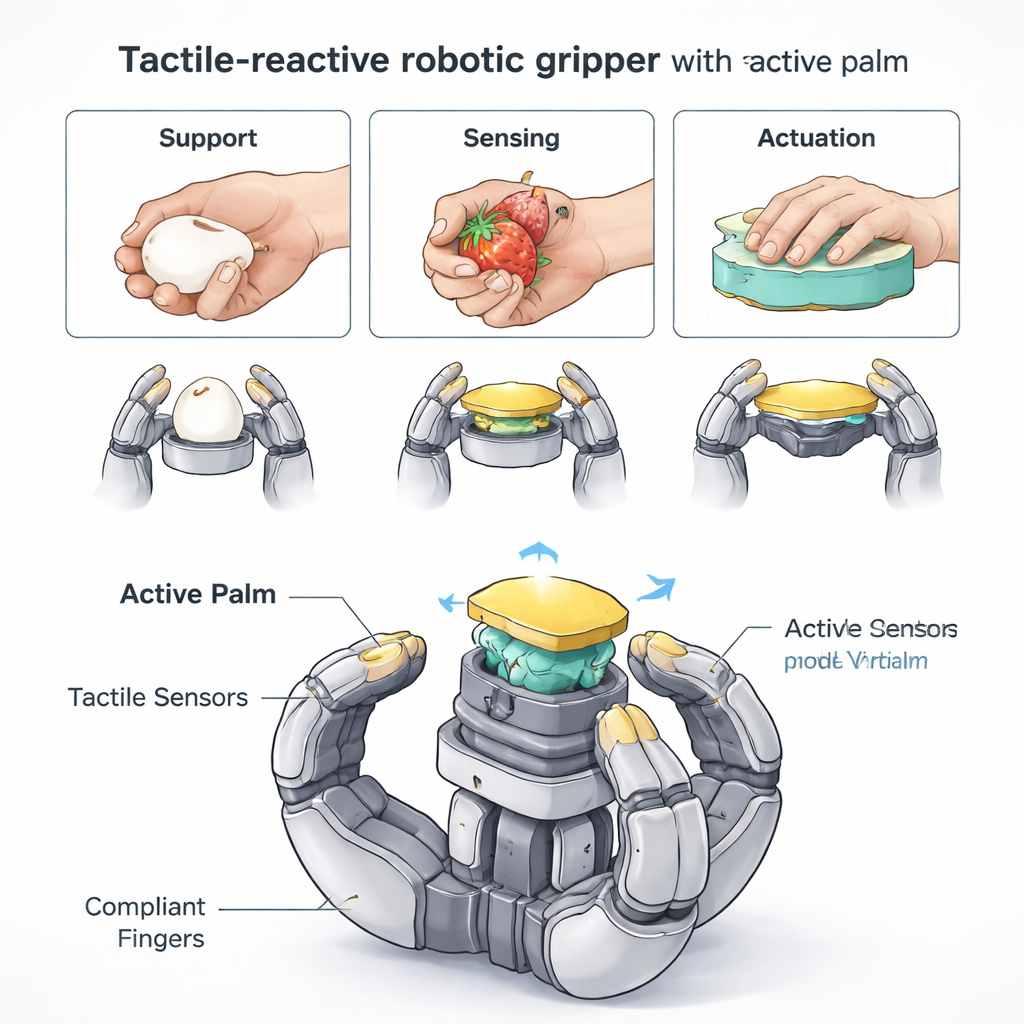
Bugün çoğu robot eli ya sadece kavrayabilen basit ve sert çengellerdir ya da inşa edilmesi ve kontrol edilmesi zor çok parmaklı karmaşık ellerdir. Bu çalışmanın önemli içgörüsü, insan ellerinin destek, his ve itme gibi işlevlerde yalnızca parmaklara değil avuca da büyük ölçüde güvendiğidir. Araştırmacılar, yukarı-aşağı hareket edebilen merkezi bir avuca sahip üç parmaklı bir robot kavrayıcı tasarladılar; avuç, kamera tabanlı bir dokunma sensörü ile kaplı. Her parmak ucunda ayrıca esnek bir basınç algılayıcı pedi bulunuyor. Bu parçalar birlikte kavrayıcının nesneyle nerede ve nasıl temas ettiğini hissetmesini ve tüm sistem yalnızca yedi hareketli eklem kullanırken bile kavrayışını gerçek zamanlı olarak ayarlamasını sağlıyor.
Basit Hareketler, Birçok Tutma Biçimi
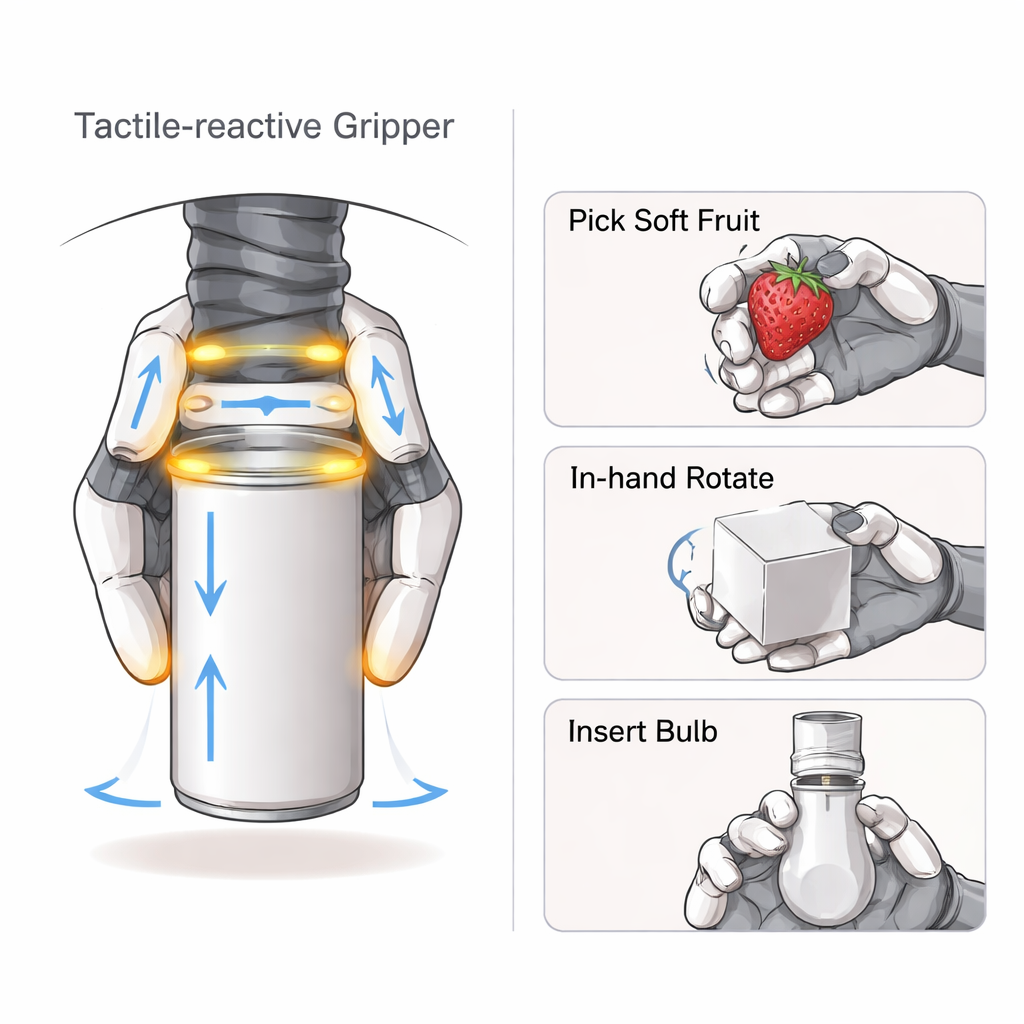
Kavrayıcının üç özdeş parmağı süpürebilir ve bükülebilir; bu, günlük birçok tutma stiline izin veriyor: toplar gibi büyük nesneleri kafesleyerek tutma, kartlar gibi ince nesneleri cımbızla tutma ve ağır aletleri güç kavrayışıyla sıkma. Yumuşak, omurgamsı parmak yapısı, ayrıntılı programlama gerekmeden farklı şekillerdeki nesnelerin etrafını doğal olarak sarıyor. Bu arada avuç bir asansör gibi dikey olarak kayıyor; böylece nesneye bastırabiliyor, yükü parmaklarla paylaşabiliyor veya nesnenin eldeki konumunu kaydırabiliyor. Simülasyonlar ve deneyler, her parmaktaki sadece iki eklem artı hareketli avuca rağmen elin nesneleri birçok yönde hareket ettirebildiğini ve kontrolü zor, garip pozlardan kaçınabildiğini gösteriyor.
Hem Parmaklarla Hem de Avuçla Hissetmek
Tutulan şeyi anlamak için kavrayıcı üç tür algılamayı birleştiriyor: avuçtan alınan ayrıntılı dokunma görüntüleri, parmak uçlarından gelen basınç haritaları ve kendi eklem açılarına ilişkin veriler. Bir makine öğrenimi sistemi bu sinyalleri harmanlıyor ve hangi ipuçlarının belirli bir nesne için daha yararlı olduğuna göre daha fazla dikkat gösteriyor. İçecek kutuları ve farklı boyut ve malzemelerde toplarla yapılan testlerde sistem, tutulan nesneyi neredeyse %99 doğrulukla tanıyabildi. Bu zengin dokunma hissi aynı zamanda ne kadar sıkıca sıkılacağını, parmakların ne zaman kapanmayı durduracağını ve sürtünmeyi çok artırmadan teması sabit tutmak için avucu nasıl hareket ettireceğini de yönlendiriyor.
Test Nesnelerinden Meyveye ve Ampullere
Araştırma ekibi, kavrayıcıyı toplar, aletler ve küçük donanım parçaları gibi günlük nesnelerle yaygın kullanılan bir robot kavrama kıyaslama testinden geçirdi. Daha az hareketli parça kullanırken birkaç tanınmış araştırma kavrayıcısından daha yüksek puan aldı. Test setlerinin ötesinde kavrayıcı, çilek, üzüm, domates ve benzeri hassas meyveleri günler sonra ultraviyole ışık altında bile görünür ezilme olmadan toplayabildiğini gösterdi. Ayrıca blok ve silindirleri elde hassas biçimde öteleme ve döndürme, yukarıya dönük bir sokete ampul vidalama, namluyu tutarken şırınganın pistonunu itme ve çocuk kilitli kapakları bastırıp döndürerek açma gibi işlemleri gerçekleştirebildi. Bu görevların birçoğunda hareketli avuç, standart sadece-parmak kavrayıcıların eksik olduğu ekstra itme, destek veya algılama işlevini sağladı.
Gelecek Robotlar İçin Neden Önemli
Bu çalışma, robotların becerikli olmak için her zaman daha fazla parmak veya ekleme ihtiyaç duymadığını gösteriyor. Birkaç uyumlu parmağın dikkatle, aktif kontrollü ve dokunma duyarlı bir avuçla koordine edilmesi sayesinde bu kavrayıcı, güç, incelik ve farkındalık karışımına ulaşıyor; bu da insan eline benzer bir durumu andırmaya başlıyor. Parçalar büyük ölçüde 3D yazdırılabilir ve piyasada bulunan sensörleri kullandığı için tasarım nispeten kolayca yeniden üretilebilir. Daha fazla öğrenme tabanlı kontrol ile benzer kavrayıcılar, robotların market alışverişini tutmasına, ev bakımında yardımcı olmasına veya fabrikalarda insanlarla güvenli bir şekilde çalışmasına yardımcı olabilir—yaptıklarını yalnızca tahmin etmek yerine güvenle hissederek.
Atıf: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
Anahtar kelimeler: robotik kavrayıcı, dokunma hissi, ustaca manipülasyon, robotik el, aktif avuç