Clear Sky Science · tr
Su içi yumuşak kanatlarda propriosepsinin kullanımı melez pasif-aktif bozulma reddini mümkün kılıyor
Su Altında Akıllı Kanatlar
Rüzgârlı bir havada bir kuşun sabit kalarak süzülmesini ya da hızlı akan bir dere içinde bir balığın yerinde durmasını izleyen herkes, doğanın zor bir mühendislik sorununu çözdüğünü görmüştür: çevreleyen akış istenildiği gibi davranmadığında rotada nasıl kalınır. Bu çalışma, hayvanlardaki propriosepsiye benzer bir “öz-farkındalığa” sahip yeni bir yumuşak sualtı kanadının ani akış değişikliklerini otomatik olarak hissedip dengeyi korumak için şekil değiştirebildiğini gösteriyor. Çalışma, dalgalı sularda daha az enerji tüketerek hayvanlara benzeyen daha akıcı süzülme yeteneğine sahip geleceğin sualtı robotlarına işaret ediyor.
Kuşlardan ve Balıklardan Öğrenmek
Doğada kanatlar ve yüzgeçler sert bıçaklar değildir; bükülür, burkulur ve esnerler. Kuşlar, tüylerindeki küçük reseptörlerle havanın hareketini hissederken balıklar vücutları boyunca ve yüzgeç ışınlarında basınca duyarlı hücreler kullanır. Bu gömülü sensörler hayvanların eklemlerinin hareketle nasıl deforme olduğunu hissetmesine ve anında tepki vererek rüzgâr ve türbülansı reddetmesine imkân verir. Buna karşılık, çoğu sualtı aracı rijit kontrol yüzeyleri ve akışı ölçen ayrı enstrümanlar kullanır; çevre kaotikleştiğinde bunlar yavaş ve enerji tüketimi yüksek olur. Yazarlar, esneklik ile algılamayı tek bir yumuşak yapıda birleştirmenin bu farkı kapatabileceğini savunuyor.
Gömülü Duyuya Sahip Yumuşak Bir Kanat
Araştırma ekibi, yumuşak, bükülebilen bir kuyruğu sert bir burunla birleştiren su altı kullanımına yönelik yarım bir kanat inşa etti. Yumuşak bölümün içinde sıvı ile dolu şişirilebilir tüpler bulunuyor; bunlar kanadın eğriliğini, yani kamburlaşmasını değiştirmek için basınçlandırılabiliyor. Dışarıda ise silikon ve sıvı metal tellerden oluşan ince bir elektronik “deri” yapıştırdılar. Kanat büküldüğünde gömülü iletkenler arasındaki mesafe değişiyor ve bunun sonucu olarak elektriksel kapasitansları değişiyor. Basit bir makine öğrenimi modeliyle bu sinyalleri kamerayla izlenen şekillerle eşleştirerek araştırmacılar e-deriyi son derece hassas bir şekil sensörüne dönüştürdüler. Eğitildikten sonra sistem, su altında bile harici kameralara ihtiyaç duymadan kanadın kamburlaşmasını gerçek zamanlı olarak tahmin edebiliyor.
Şekli Kontrole Dönüştürmek
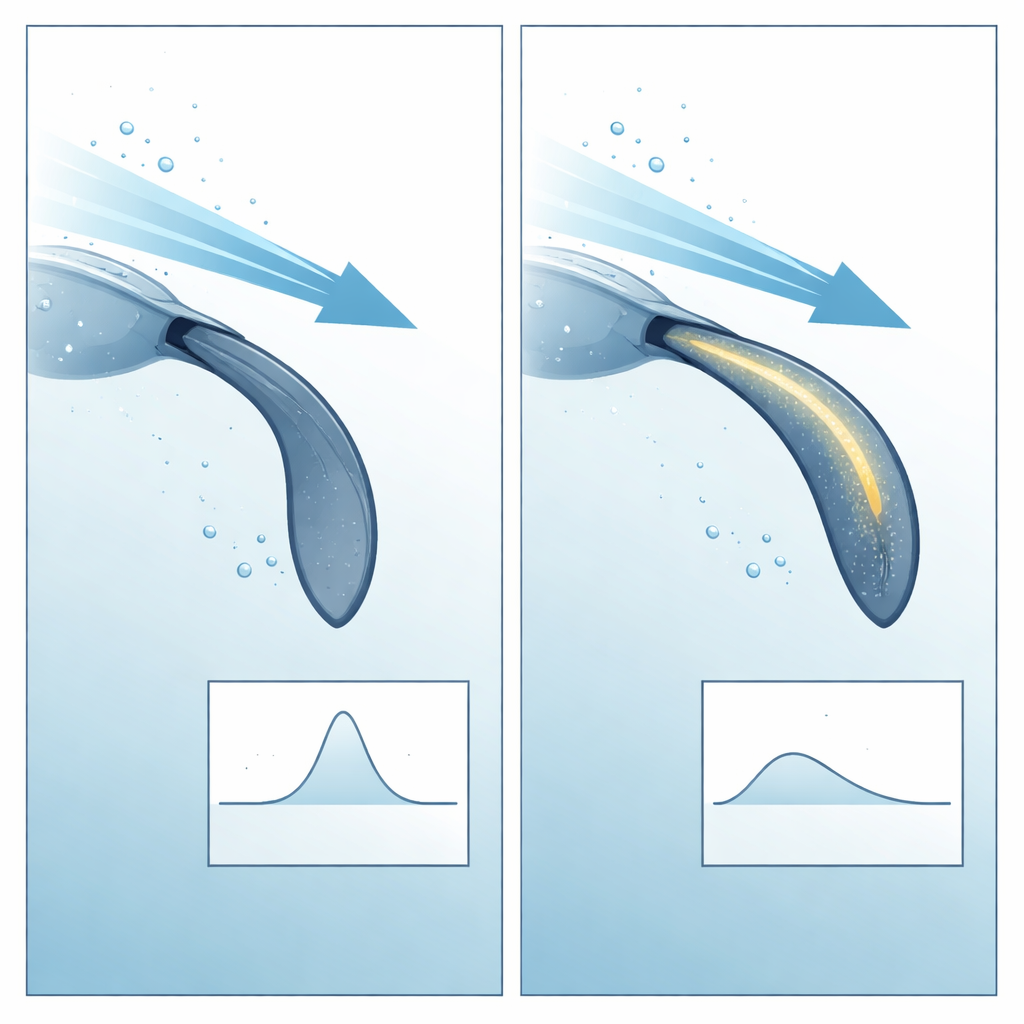
Bu proprioseptif yumuşak kanadı bir su tüneline monte ederek araştırmacılar, kanadın akışa göre açısında ani değişiklikler olarak türbülansları taklit ettiler. Önce sabit koşullarda, kamburlaşmayı ayarlayarak farklı akış açılarında aynı kaldırmayı, ya da aynı açıda farklı kaldırmaları üretebileceklerini gösterdiler. Bu, bir türbülans kanadı dengesinden çıkarmaya çalıştığında, istenen kaldırmayı geri getirebilecek bir şekil uzayında “yol” olduğu anlamına geliyor. Ardından, türbülansın tam olarak ne zaman olacağını bilmeyen idealize bir açık döngü yanıtı programladılar—iç tüpleri doğru anda şişirip söndürecek şekilde. Bu en iyi durumda, kamburlaşmayı değiştirmek bozulma sırasında kaldırmadaki düşüşü yaklaşık %50’den yaklaşık %10’a kadar düşürdü.
Kanadın Kendi Kendine Tepki Vermesine İzin Vermek
Daha zorlu test, kanadın ne zaman bir şeylerin yanlış olduğunu kendi karar vermesine izin vermekti. Burada e-deri, kamburlaşma sinyalinde karakteristik bir “imza” algılıyor: yumuşak gövde ani akış değişimi altında büküldüğünde hızlı bir aşım ve salınım. Bu desen belirdiğinde, basit bir kontrolör tüpleri kaldırmayı hedefe yaklaştırma olasılığı en yüksek olan yönde şişiriyor; akışın veya kuvvetlerin açıkça hesaplanmasına gerek yok. Bu minimalist strateji bile iyi çalışıyor. Eşdeğer bir rijit kanada kıyasla, actuated olmayan yumuşak kanat tek başına bir türbülansın dürtüsünü—temelde zaman içinde uygulanan toplam itişi—yaklaşık üç kat azaltıyor. Aktif kontrol eklendiğinde, istenmeyen toplam kaldırma dürtüsü %87’ye varan oranlarda azaltılıyor; bazı kuşlar için raporlanan türbülansla başa çıkma yeteneğine yakınlaşıyor ve hatta aşabiliyor, ancak farklı bir ortamda.
Geleceğin Robotları İçin Neden Önemli
Bilim dışı okur için ana çıkarım şudur: sualtı robotlarını daha yumuşak ve daha kendini algılayabilen hâle getirmek, onları hem daha dayanıklı hem de daha verimli kılabilir. Robotun esnek gövdesi ve gömülü derisi, karmaşık dış sensörler ve kaba kuvvet motorlarıyla boğuşmak yerine akışı emip okumaya yardımcı olur ve rotayı korumak için makul şekil değişikliklerini tetikler. Bu çalışma kontrollü bir tankta tek deneysel kanada odaklansa da aynı ilkeler tam araçlara veya balık benzeri yüzme robotlarına uygulanabilir. Uzun vadede, bu tür “bedenselleşmiş zeka” makinelerin türbülanslı okyanusları, kuşların ve balıkların hava ve su içinde zaten sergilediği sakin zarafetle keşfetmesine olanak verebilir.
Atıf: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
Anahtar kelimeler: yumuşak robotik, sualtı araçları, biyoilhamlı tasarım, akış bozulmasını reddetme, proprioseptif algılama