Clear Sky Science · tr
Yumuşak nesnelerin somut dokunma algısı
Robotlara Hissetmeyi Öğretmenin Önemi
Bir robotun hastanın karın bölgesini nazikçe muayene ettiğini, olgun meyveyi ezmeden ayırdığını veya yalnızca dokunarak kırılgan parçaları monte ettiğini hayal edin. Bunların hiçbirini güvenli şekilde yapabilmesi için robotların yumuşak nesneleri insan‑benzeri, zengin bir biçimde “hissetmeyi” öğrenmesi gerekir. Bu makale, araştırmacıların elektronik bir deri ve yeni bir tür öğrenme modeli geliştirerek robotların yumuşak nesnelerin yumuşaklığını, şeklini ve yüzey dokusunu daha iyi algılamasını nasıl sağladığını anlatıyor—makinelere gerçekten ustaca bir dokunuşa bir adım daha yaklaştırıyor.
İleri Düzey Bir Dokunma Duyusu İnşa Etmek
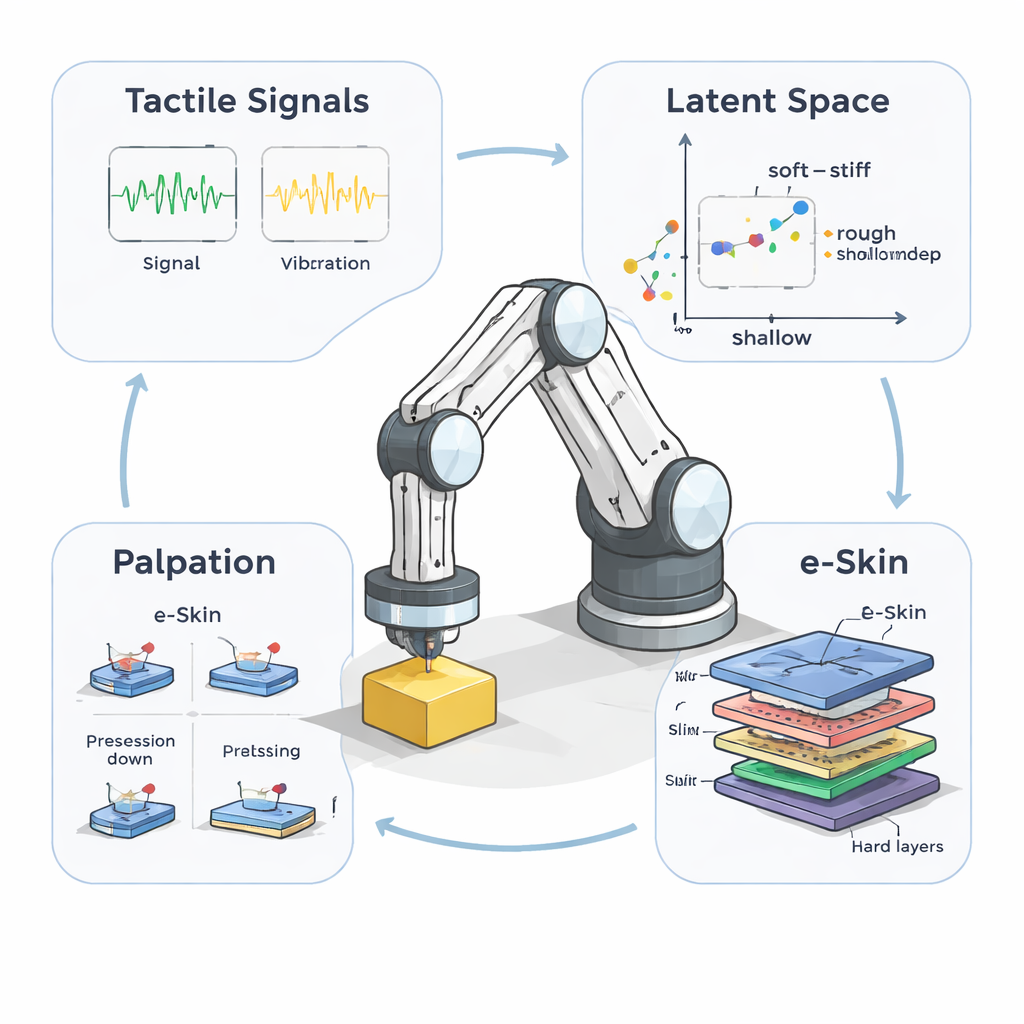
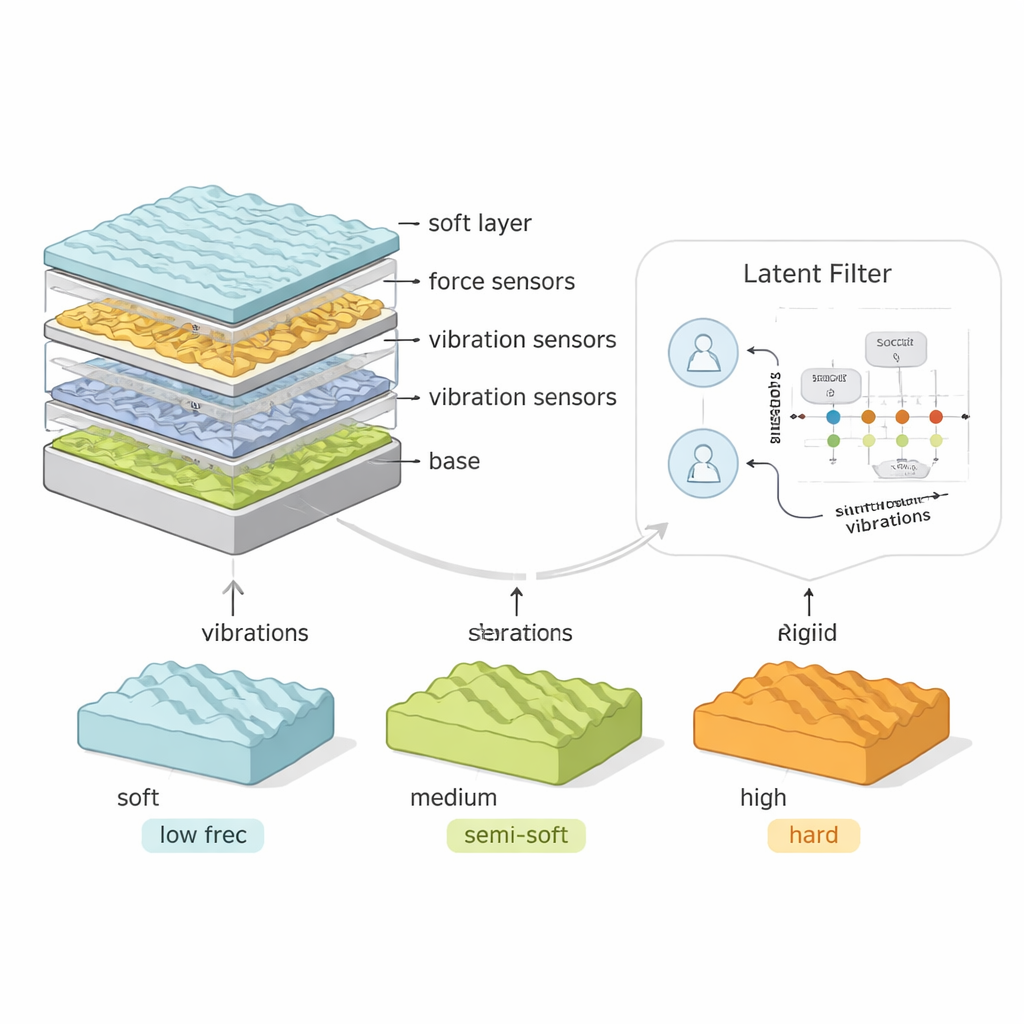
İnsan derisi yumuşak, katmanlıdır ve basınca, gerilmeye ve titreşime tepki veren farklı dokunma reseptörleriyle doludur. Ekip bu yetenekleri bir robota benzetmeyi hedefledi. Gömülü sensörlere sahip üst üste yerleştirilmiş silikon katmanlardan oluşan modüler bir elektronik deri, yani e‑Skin yarattılar. İki katman, derinin farklı noktalarının ne kadar bastırıldığını ölçen yoğun kuvvet sensörü ızgaraları içerirken, üçüncü bir katmanda pürüzlü kumaş üzerinde parmak kaydırıldığında hissettiğiniz vızıltı gibi hızlı titreşimleri algılayan küçük ivmeölçerler bulunuyor. Silikon türlerini değiştirerek e‑Skin’in kendisini daha yumuşak veya daha sert yapabildiler ve sensör katmanlarını açıp kapatarak farklı “duyu organı” kombinasyonlarını test edebildiler.
Yumuşak Nesneler Dünyası Tasarlamak
Dokunmayı kontrollü bir şekilde incelemek için araştırmacıların basit kauçuk bloklardan daha fazlasına ihtiyacı vardı. Özenle ayarlanmış özelliklere sahip “dalga nesneleri” kütüphanesi oluşturdular. Her nesnenin tepesi dalgalı bir yüzeye sahipti; tümsekler sığ veya yüksek (genlik) ve birbirine yakın veya uzak (uzaysal frekans) olabiliyordu ve her biri çok yumuşak silikonlardan sert plastiğe kadar farklı malzemelerden döküldü. Bazı örnekler ayrıca yumuşak bir yüzeyin altında ince sert bir katman saklıyordu; bu, daha derine bastırıldığında değişen dokular veya malzemeleri taklit ediyordu. Bu sayede ekip, robotun dokunduğu her nesnenin kesin yumuşaklığını ve dokusunu biliyor, robotun “hissettikleri” ile yer gerçeğini karşılaştırabiliyordu.
Robotlara Dokunmayla Keşfetmeyi Öğretmek
İnsanların bir nesneyi değerlendirmek için parmaklarını dürtme, bastırma ve kaydırma gibi farklı hareketlerle kullandığı gibi, robot da üç temel palpasyon hareketi kullandı. Bastırmada, hacimsel yumuşaklığı sınamak için yukarı aşağı düz hareket etti. Precession hareketinde e‑Skin’i eğdi ve yuvarladı; böylece birkaç yakındaki bölgeyle temas ederek daha karmaşık şekilleri yokladı. Kaydırmada ise yüzey boyunca yanlamasına hareket ederek ince dokuları ve sürtünmeyi ortaya çıkardı. Her nesne için robot bu hareketleri farklı derinlik ve hızlarla gerçekleştirdi; derinin üzerindeki kuvvetlerin zamana göre değiştiği ve titreşimlerin yayıldığı binlerce zaman‑varyantlı dokunma sinyali üretti. Bu zengin, dinamik veri akışları tek bir statik dürtüden çok daha bilgilendiriciydi.
Dokunmadaki Gizli Desenleri Keşfetmek
Bu bilgi selini anlamlı kılmak için yazarlar Latent Filter adını verdikleri bir makine öğrenmesi modeli tanıttılar. Nesneleri doğrudan etiketlemeye çalışmak yerine model, robotun bir nesneyle süregelen etkileşimini özetleyen içsel bir “harita” öğreniyor. Bu gizli uzay, bazı bileşenlerin anlık dokunma sinyallerine hızlı tepki vermesi, diğerlerinin ise zaman içinde bilgiyi yavaşça bütünleştirmesi şeklinde yapılandırılıyor. Latent Filter’ı birçok etkileşim üzerine eğiterek ekip, bu içsel haritanın yüzey pürüzlülüğü, tümsek yüksekliği ve sertlik gibi anlamlı fiziksel özelliklerle doğal olarak hizalandığını gösterdi—modele bu etiketler açıkça öğretilmemiş olmasına rağmen. Ayrı bir regresyon adımı, bu gizli özelliklerin bir nesnenin gerçek mekanik özelliklerini iyi bir doğrulukla tahmin edebildiğini doğruladı.
Deri, Duyular ve Hareketin Birlikte Çalışması
Deneyler, tek bir sensör katmanı veya hareket stratejisinin her durum için en iyi olmadığını ortaya koydu. Her sinyal türünün ayrı ayrı işlendiği ve sonra birleştirildiği “geç füzyon” yaklaşımıyla titreşim ve kuvvet bilgilerini birleştirmek, yumuşak nesneleri anlamada en güvenilir sonucu verdi. İki kuvvet katmanı sistemin kayma ve gerilmeyi hissetmesine yardımcı oldu; bunlar sertliği ve gizli iç yapıyı tespit etmek için hayati önemdedir, oysa titreşimler kaydırma sırasında ince dokuları hissetmede özellikle faydalıydı. e‑Skin’in mekanik yumuşaklığı da önemliydi: daha sert deriler genel sertliği ve şekli ölçmede daha iyiyken, daha yumuşak deriler uyumlu veya katmanlı malzemelerdeki ince farklılıkları algılamada üstünlük sağladı. Sonuçlar robot dokunuşunun birlikte tasarlanması gerektiğini öne sürüyor: deri özellikleri, algılama elektroniği ve robotun hareket tarzı birlikte ayarlanmalı.
Günlük Yaşam Robotları İçin Anlamı
Katmanlı, insan ilhamlı bir e‑Skin’i eylemin rolünü gözeten güçlü bir öğrenme modeliyle birleştirerek bu çalışma, robotların daha derin bir dokunma duygusu inşa edebileceğini gösteriyor. Sadece kameralara veya basit kuvvet eşiklerine güvenmek yerine geleceğin makineleri, bir nesnenin nasıl verdiğini, titreştiğini ve keşfedildikçe nasıl değiştiğini hissedebilir ve ardından kavramalarını veya hareketlerini anında ayarlayabilir. Bu tür yetenekler tıbbi palpasyon, yumuşak gıda işleme ve evlerde ya da fabrikalarda deforme olabilen nesnelerin taşınması gibi uygulamalar için anahtar önemdedir. Basitçe söylemek gerekirse, dünyayı bizim kadar etkili bir şekilde elle tutabilmek için robotların yalnızca iyi sensörlere değil, doğru “bedene”, doğru hareket alışkanlıklarına ve tüm bu bilgiyi tutarlı bir anlayışa dönüştürecek akıllı bir yönteme ihtiyacı vardır.
Atıf: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
Anahtar kelimeler: robotik dokunuş, elektronik deri, yumuşak nesne algılama, dokunma algısı, somut robotik