Clear Sky Science · tr
GenHand: genelleştirilmiş insan kavrama kinematik yeniden hedefleme
Robotlara Bizim Gibi Tutmayı Öğretmek
Bir kahve fincanını almak ya da bir tornavidayı çevirmek gibi işler, ellerimiz için zahmetsiz görünür. Ancak robotlar, özellikle tutucuları insan eline hiç benzemiyorsa, günlük nesneleri güvenilir şekilde kavramakta çoğunlukla zorlanır. Bu makale, sıradan görüntülerdeki insan el hareketlerinden öğrenen ve bunları birçok farklı robot eline insan benzeri, kararlı kavrayışlara dönüştüren bir sistem olan GenHand’i tanıtıyor.
Robot Ellerinin Taklitten Fazlasına İhtiyacı Var
Mevcut birçok teleoperasyon ve taklit öğrenimi sistemi, insan elinin pozunu doğrudan bir robot eline kopyalamaya çalışır. Parmak uçları ve eklem açılarını olabildiğince eşleştirirler. Bu yalnızca robot elinin insan eline çok benzemesi ve benzer sayıda parmak ile ekleme sahip olması durumunda işe yarar. Robot tutucu daha basitse —örneğin yalnızca iki düz parmak— kopyalanan poz artık güvenli bir kavrama yaratmayabilir. Bu yaklaşımlar ayrıca nesnenin şekli ve nerede sağlam temas gerektiğini büyük ölçüde göz ardı eder; sonuçta oluşan kavrayışlar kayabilir, dengeyi yitirebilir veya yüzeye doğru temas etmeyebilir.
Ellere ve Nesnelere Birlikte Bakmak
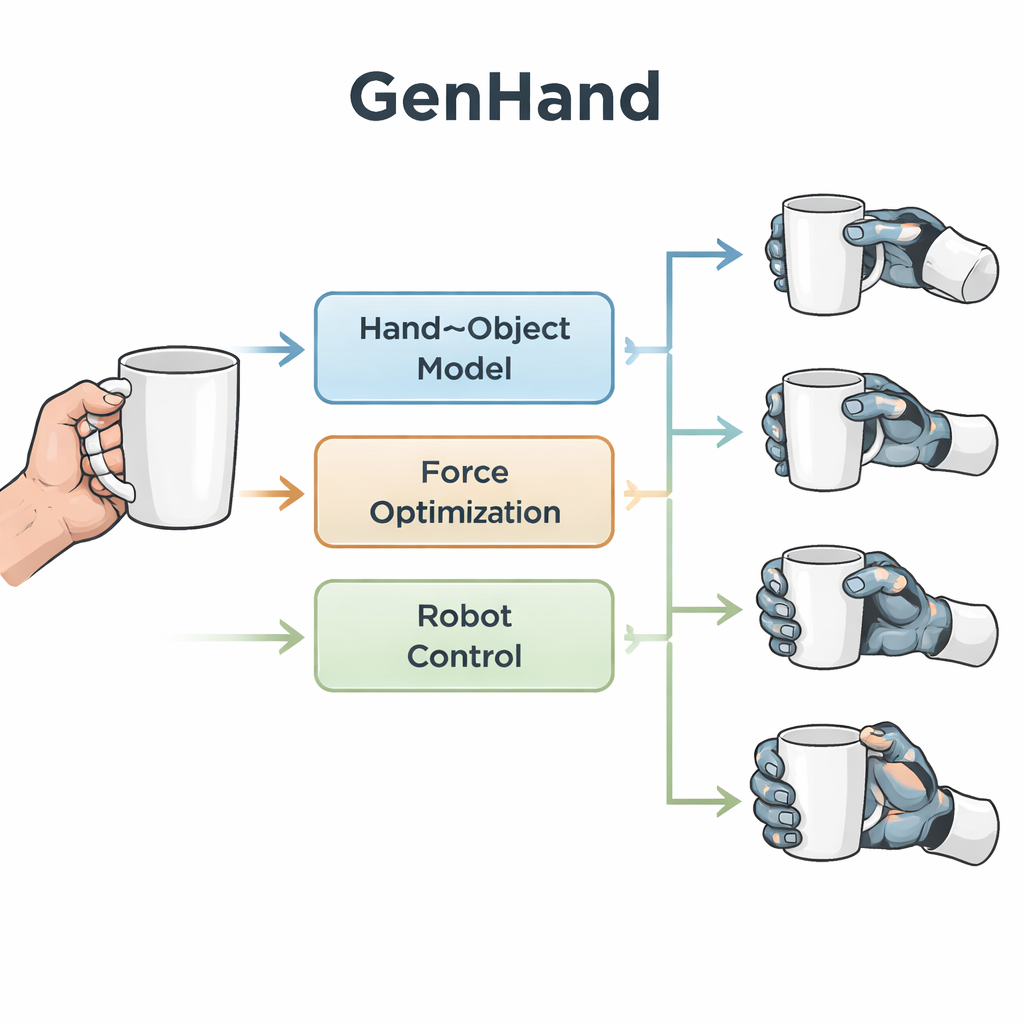
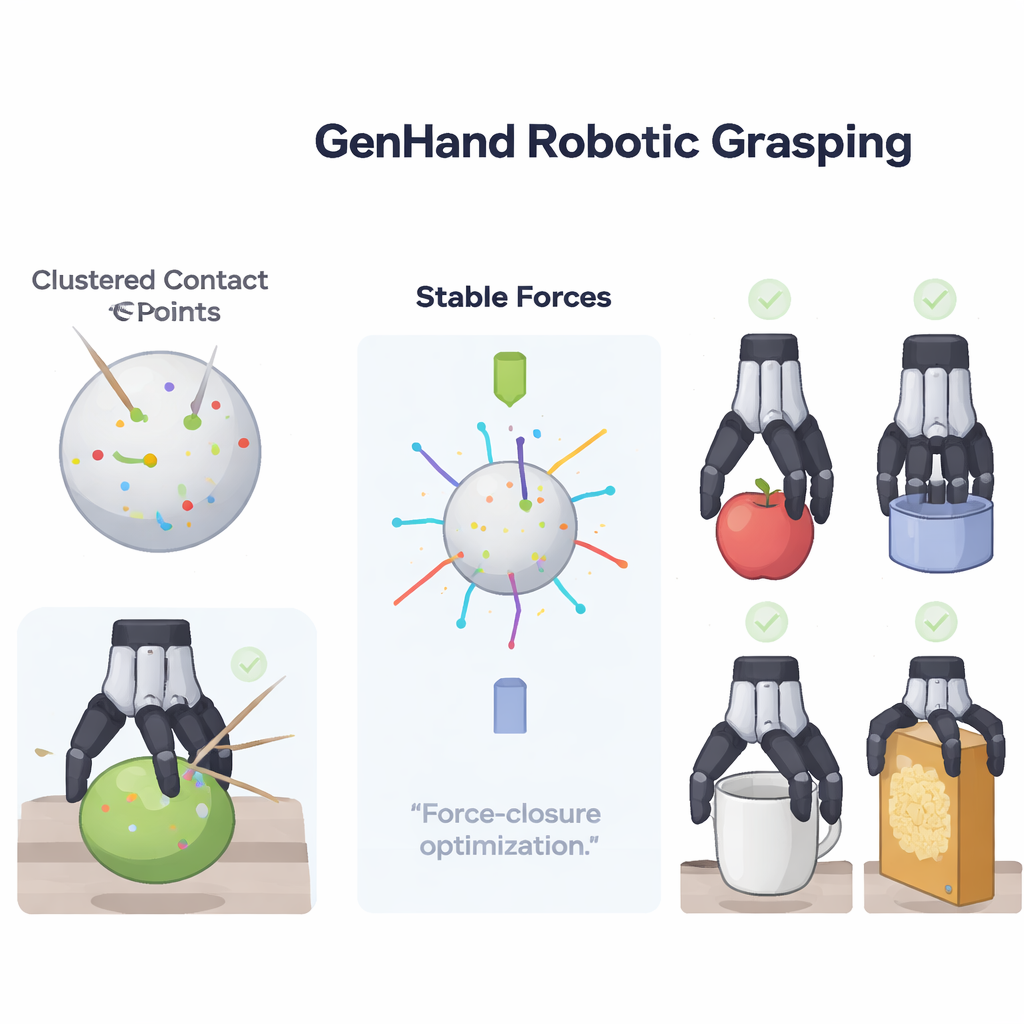
GenHand bu soruna elin şekline değil, el ile nesne arasındaki etkileşime odaklanarak yaklaşır. Normal bir RGB görüntüden başlayarak sistem, nesnenin ayrıntılı bir 3B modelini ve parametrik bir insan eli 3B modelini yeniden oluşturur. Elin pozunu çıkarmak için bir sinir ağı ve nesnenin yüzeyini geri kazanmak için gelişmiş bir "imzalı uzaklık" (signed distance) temsili kullanır. Bu iki modelden GenHand, insan parmak uçlarının gerçekte nerede temas ettiğini ve nesneye hangi yönlerde bastığını belirler. Ardından bu temas noktalarını anlamlı bir küçük bölge ve kuvvet yönleri kümesine kümeleyerek insan kavramasının temel yapısını özetler ve gereksiz ayrıntıları filtreler.
Her Robot İçin Kavramayı Yeniden İcat Etmek
GenHand, kritik temas bölgelerini ve bunların nesneyi nasıl desteklediğini anladığında, özel robot tutucusuna uygun yeni bir "temas çapağı" (contact anchor) seti oluşturur. Basit bir iki parmaklı tutucu için yalnızca iki karşıt temas bölgesini koruyabilir; kutuyu sıkan bir çift başparmak gibi. Üç, dört veya beş parmaklı daha hünerli ellere ise insan kavramasının zengin temas düzenine daha iyi uyması için ek çapalar atayabilir. Ardından matematiksel bir optimizasyon, kuvvet ve momentlerin tüm yönlerde dengelenebileceği —kuvvet kapanımı (force closure) olarak bilinen— temas noktalarını nesne yüzeyinde arar. Kritik olarak, GenHand ortaya çıkan kavramanın gerçek dünyada fiziksel olarak kararlı olmasını şart koşarken orijinal insan temaslarına yakın kalmayı sürdürür.
Kararlı Temaslardan Gerçek Robot Hareketlerine
Kararlı temas çapaları belirlendikten sonra, ikinci bir optimizasyon aşaması robotun bu çapaları gerçekleştirebilecek gerçek eklem açılarını ve bilek hareketlerini bulur; eklem sınırlarını aşmamak ve nesneyle çarpışma yaratmamak koşuluyla. Bunu yapmak için GenHand, robotun potansiyel temas yerlerini istenen çapalarla sürekli eşleştirir, pozunu ayarlar ve bağlantıların nesnenin içine girip girmediğini kontrol eder. Bu süreç, basit bir Robotiq iki parmaklı tutucudan son derece eklemlenmiş beş parmaklı Shadow eline kadar çeşitli robot ellere uygulanır ve fizik simülasyonunda test edilir. Parmak ucu geometrisini yalnızca taklit eden önde gelen bir karşılaştırma yöntemine kıyasla GenHand, kuvvet dengesizliğini çok daha düşük, yüzey temasını daha doğru ve farklı sürtünme koşullarında 20 günlük nesnenin kaldırılması ve tutulmasında belirgin şekilde daha yüksek başarı oranları üretir.
Bu, Günlük Robotları Nereye Taşır?
Bir okuyucu için öz, GenHand’in robotlara "parmaklarını nereye koyacakları" değil, "şeyi nasıl tutacakları" konusunda daha iyi bir his kazandırmasıdır. Gerçek insan kavrayışlarından öğrenip temel fiziksel kararlılık kurallarını uygulayarak, aynı insan gösterimini çok farklı robot ellere yeniden hedefleyebilirken yine de sağlam, güvenilir kavramalar elde edebilir. Bu, teleoperasyonlu robotları kontrol etmeyi kolaylaştırır, öğrenme sistemlerinin daha zengin örneklerle eğitim almasını sağlar ve insanların tutabildiği çok çeşitli nesneleri güvenle manipüle edebilen ev ve işyeri robotlarına bizi daha da yaklaştırır.
Atıf: Qi, L., Popoola, O., Imran, M.A. et al. GenHand: generalised human grasp kinematic retargeting. npj Robot 4, 19 (2026). https://doi.org/10.1038/s44182-026-00076-1
Anahtar kelimeler: robotik kavrama, teleoperasyon, insan gösterimi, robot elleri, manipülasyon