Clear Sky Science · tr
Görüş tabanlı kuvvet ve tork algılama için entegre kameraya sahip uygun maliyetli 3B yazdırılmış minyatür robotik kavrayıcı
Neden Minik Yumuşak Kavrayıcılar Önemli
Robotlar küçülüyor ve daha hassas işler yapıyor; minik dişlileri monte etmekten olgun meyveleri patlatmadan toplamak gibi. Ancak çoğu robot eli hâlâ neredeyse kör bir şekilde sıkıyor ve ne kadar bastığını pek bilemiyor. Bu makale, “Seezer” adı verilen düşük maliyetli, 3B yazdırılmış minyatür bir kavrayıcıyı tanıtıyor: hem kırılgan nesneleri tutabilen hem de pahalı kuvvet sensörleri yerine parmak uçlarına yerleştirilmiş küçük bir kamera sayesinde kuvvetleri “hissedebilen” bir tasarım.
Gören Nazik Bir El
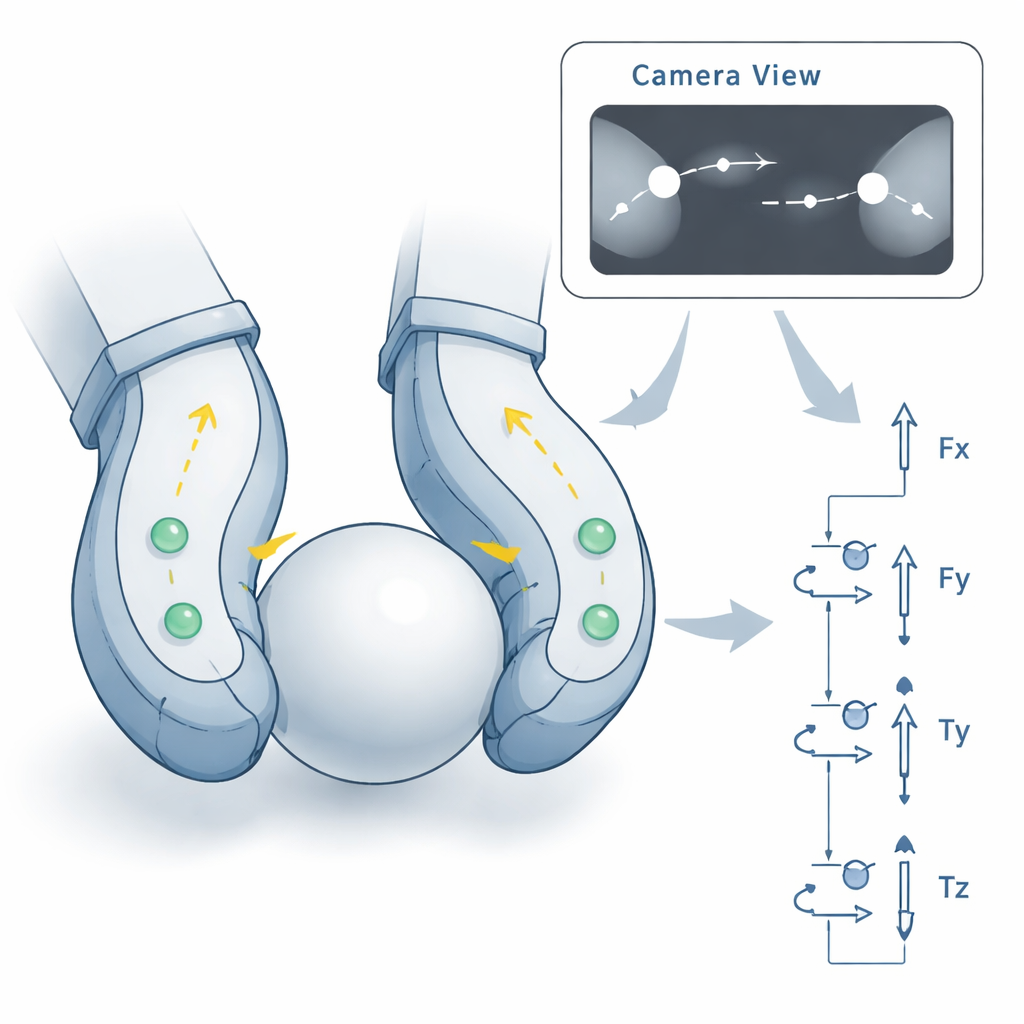
Seezer, parmakları metal pense gibi menteşelenmek yerine esneyen yumuşak, uyumlu bir robotik kavrayıcıdır. Ana fikri, tüketici sınıfı bir 3B yazıcıda neredeyse her şeyi tek parça hâlinde üretmektir: esnek eklemler, göreve uygun parmak uç şekilleri ve küçük yerleşik işaretleri içeren monolitik bir parmak parçası. Bu tek kullanımlık parmak modülü, küçük bir kamera ve ışıkları barındıran kompakt bir motor ünitesinin üzerine kaydırılır. Motor bir vida dişlisini döndürdükçe esnek eklemler bükülür ve parmaklar bir nesnenin etrafında kapanırken kamera parmak uçlarını ve kavrayıcının önündeki alanı izler.

Parmak Eğilmelerinden Kuvvet Okuma
Parmaklara kablolar, gerinim ölçerler veya basınç pedleri gömmek yerine Seezer, iç yüzeyi bilgi açısından zengin görsel ipuçlarıyla “boyar”. Her parmak ucunda, parmak deforme olduğunda kamera görüntüsündeki konumları değişen küçük yuvarlak “fidüsyal” işaretler bulunur. Yazılım önce bu işaretleri her karede algılar ve izler. Ardından, kısa bir kalibrasyon dizisine dayanarak, basit matematiksel modeller işaret pozisyonlarındaki kaymaların her parmak ucundaki gerçek itme ve çekme kuvvetleriyle nasıl ilişkilendiğini öğrenir. Üç parmak ucu kuvvetini temel fizik ile birleştirerek sistem, kavrayıcı üzerindeki toplam kuvvetleri ve tümleşik altı eksenli torkları ile parmaklar arasındaki sıkma kuvvetini tahmin eder.
Kuvvetleri Ne Kadar İyi Hissediyor
Bu kamera tabanlı algılama yönteminin doğruluğunu test etmek için yazarlar, Seezer’in tahminlerini kontrollü bir laboratuvar düzeninde yüksek hassasiyetli ticari bir kuvvet/tork sensörü okumalarıyla karşılaştırdı. Bir parmak tasarımı versiyonunda (daha sert uçlar) kavrayıcı, yaklaşık 1,1 newtona kadar sıkma kuvvetlerini %8 ile %17 arasında tipik hatalarla ölçtü ve altı eksenli kuvvetler ve torklar için hatalar genelde %8 ile %24 aralığındaydı. Daha yumuşak parmak ucu versiyonu maksimum kuvvetten ödün verip daha yüksek hassasiyet sundu; daha küçük kuvvetler üretti ama yüzde hatalar açısından yine karşılaştırılabilir kaldı. Önemli olarak, modellerin yalnızca 31 ile 141 kalibrasyon veri noktasına ihtiyacı vardı—tam kamera kareleri üzerinde çalışan derin öğrenme yöntemlerinin genellikle gerektirdiği binlerce görüntüden çok daha az.
Minik Dişlilerden Yumuşak Böğürtlene
İki gösterim görevi, bu kavrayıcının gerçek dünya koşullarında neler yapabileceğini öne çıkarıyor. Birinde Seezer, küçük 3B yazdırılmış dişlileri millerden defalarca alıp taşıdı ve geri yerleştirdi; dahili kamerayı hem dişli anahtarını mile hizalamak hem de parmak hareketini izlemek için kullandı. Bu, dar alanlarda ince endüstriyel montaj işlerini taklit ediyor. Diğerinde kavrayıcı, herdem kirazlarını (redcurrant) saplarından kopardı. Burada sistem gerçek zamanlı olarak kendi tahmini sıkma kuvvetini izledi ve önceden belirlenmiş bir kuvvet eşiğine ulaşıldığında kapanmayı durdurarak meyvenin ezilmeden koparılmasını sağladı. Her iki örnek de ucuz elektroniklerle çalıştı ve tek bir tasarımın birkaç milimetre boyutundaki hem sert hem yumuşak nesneleri işleyebileceğini gösterdi.
Zorluklar ve Gelecekteki Kullanımlar
Seezer hâlâ bir kavram kanıtı ve sınırlamaları var. İşaret takibi, sabit, iyi aydınlatılmış sahnelerde ve düzensiz olmayan arka planlarda en iyi şekilde çalışır; değişen aydınlatma, parlak yüzeyler ve karmaşık hareketler takip hatalarına yol açabilir. Kameranın ılımlı kare hızı da sistemin sıkı kuvvet kontrolü veya zengin haptik geri bildirim için ne kadar hızlı tepki verebileceğini kısıtlar. Parmak malzemeleri uzun kullanımda yorulabilir veya davranış değiştirebilir ve ekip henüz performansı uzun süreli kullanımda sistematik olarak test etmedi. Yazarlar, daha sağlam takip algoritmalarının veya donanımlarını modern derin öğrenme tabanlı kuvvet tahminleyicilerle birleştirmenin doğruluk ve güvenilirliği artırabileceğini; ayrıca 3B yazdırmadaki gelişmelerin cerrahi veya laboratuvar kullanımı için sterilize edilebilir tek kullanımlık parmakların daha da küçültülmesine izin verebileceğini öne sürüyor.
Günlük Robotik İçin Anlamı
Basitçe söylemek gerekirse, bu çalışma küçük, ucuz bir robot elin kendi yumuşak parmaklarının nasıl büküldüğünü izleyerek hem görebileceğini hem de hissedebileceğini gösteriyor. Yalnızca sınırlı kalibrasyon verisi ve piyasada bulunan parçalarla Seezer, ne kadar sıkıldığını ve temas kuvvetleri ile torkların hangi yönde etkidiğini tahmin ediyor; bu, nazik tutma görevleri için yeterince doğru. Dayanıklılığı artırılırsa aynı yaklaşım, gelecekte robotların küçük, hassas eşyaları—tıbbi cihazlar, elektronikler, meyve veya minimal invaziv cerrahide doku gibi—hantal sensörler veya karmaşık donanımlar olmadan tutmasına yardımcı olabilir ve sınırlı alan ve maliyetin önemli olduğu yerlere hassas dokunuş getirebilir.
Atıf: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
Anahtar kelimeler: yumuşak robotik kavrayıcı, görüş tabanlı kuvvet algılama, 3B yazdırılmış robotik, minyatür manipülasyon, haptik geri bildirim