Clear Sky Science · tr
Yumuşak robotikte ilerleme: dielektrik elastomer ve sıvı aktüatörlerdeki son gelişmeler
Kaslara Daha Çok Benzeyen Hareket Eden Yumuşak Robotlar
Bir çocuğu güvenle sarabilen, çökmüş bir binadaki enkaz arasından sıyrılıp geçen ya da zayıflamış bir kalbe nazikçe masaj yapabilen bir robotu hayal edin. Bu işleri yapmak için makinelerin metal gibi gıcırdamak yerine canlı doku gibi bükülüp gerinmesi gerekir. Bu derleme makalesi, kauçukumsu katılar ve sıvılardan yapılan yeni bir “yumuşak” elektriksel kas sınıfının bu vizyonu gerçeğe yaklaştırdığını ve laboratuvardan günlük yaşama geçmeden önce hangi zorlukların kaldığını anlatıyor.
Katı Motorlardan Yumuşak Elektrikli Kaslara
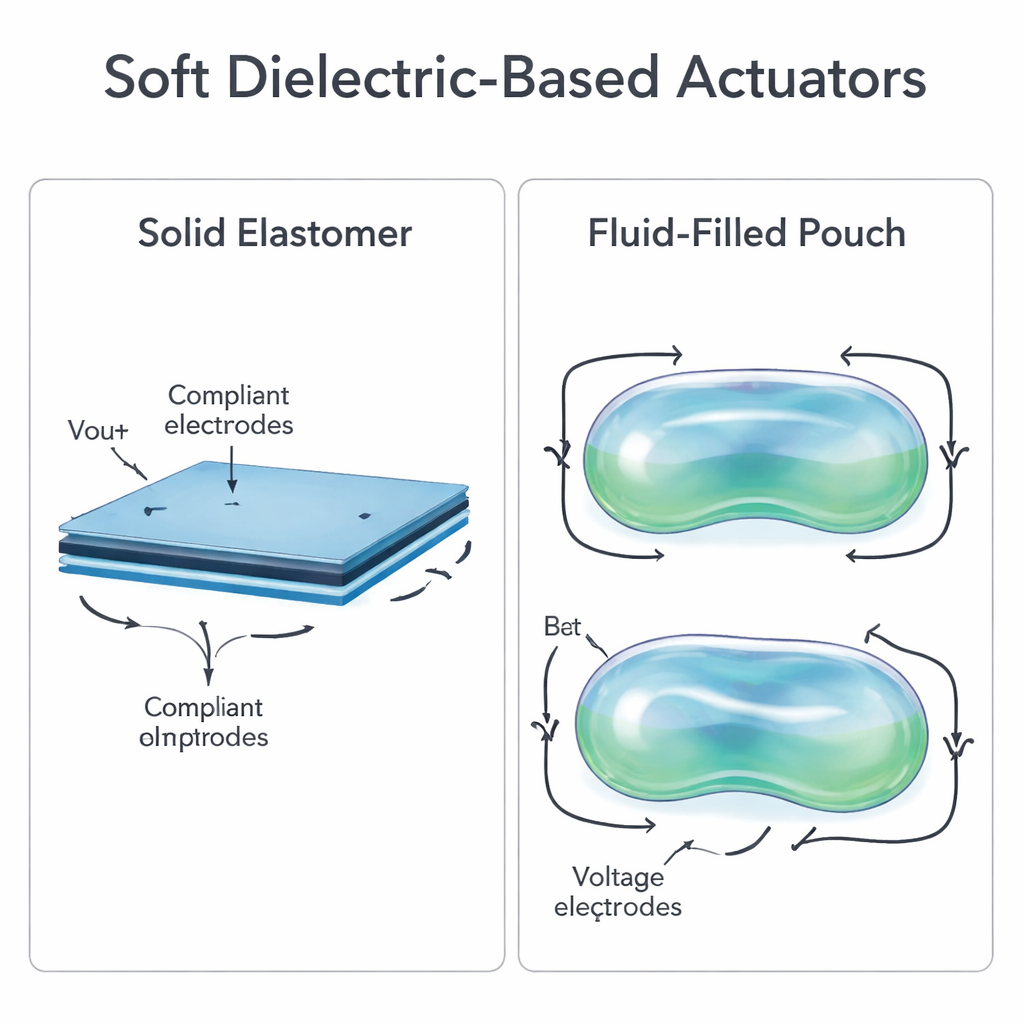
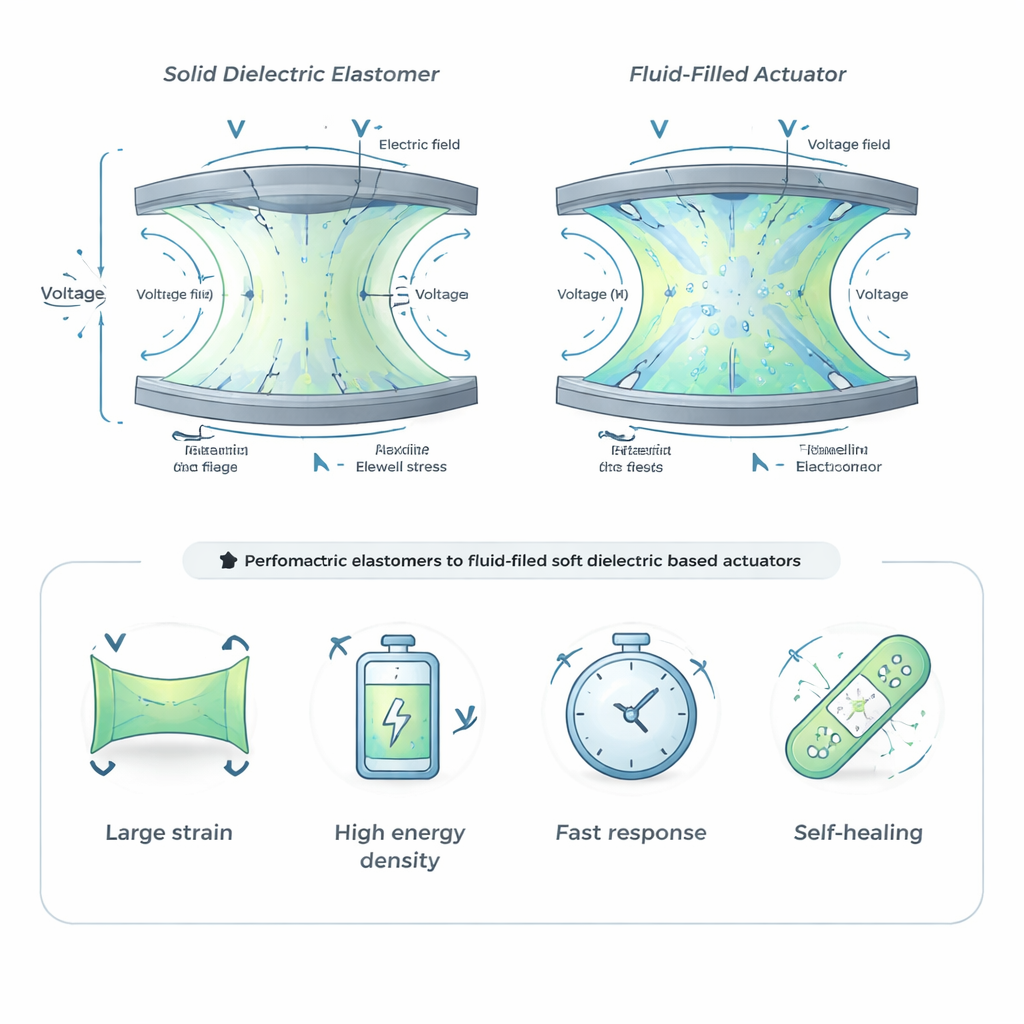
Çoğu endüstriyel robot ağır, sert motorlar ve dişlilere dayanır. Bunlar güçlü ve hassastır, ancak aynı zamanda pahalı, kırılgan ve insanlar için potansiyel olarak tehlikelidir. Silikon pişirme kalıpları veya lastik bantlara benzeyen esnek malzemelerden yapılan yumuşak robotlar, kaba kuvveti nezaket, uyum ve dayanıklılıkla değiş tokuş eder. Bu makalenin odağı elektriğe bağlı yumuşak aktüatörlerdir: katı kauçuk tabaka kullanan dielektrik elastomer aktüatörler (DEA) ve esnek bir kesede mühürlenmiş elektrik yalıtkan sıvı kullanan dielektrik sıvı aktüatörler (DFA). Her iki durumda da iki uyumlu elektrot arasına gerilim uygulamak, elektrostatiğe bağlı kuvvetlerle malzemeyi sıkıştırır ve elektrik enerjisini doğrudan büyük deformasyon, yüksek enerji yoğunluğu ve hızlı tepkiyle harekete dönüştürür.
Malzemeler Kasları Nasıl Çalıştırıyor
Bu cihazların kullanışlı kaslar gibi davranması için çok özel malzemelere ihtiyaç vardır. DEA’larda merkezdeki kauçuk levha kolayca gerinebilmesi için son derece yumuşak olmalı, ancak aynı zamanda yırtılmadan veya kısa devre olmadan yüksek elektriksel alanlara dayanabilmelidir. Araştırmacılar bu dengeyi iki ana stratejiyle ayarlar. Birincisi, esnek, düşük sertlikli ağlar içine çok sayıda polar kimyasal grup (elektriksel yanıtı artıran) yerleştiren akrilikler, silikonlar, poliüretanlar ve daha egzotik blok kopolimerler gibi yeni polimerler tasarlamaktır. İkincisi ise malzemenin elektrik enerjisi depolama kapasitesini artırmak için küçük parçacıklar veya sıvılar karıştırarak kompozitler oluşturmaktır. DFA tasarımında benzer düşünceler geçerlidir: mühendisler, doğru viskozite, stabilite ve ince plastik ya da silikon kabuklarla uyumluluk sağlayan yağlar ve diğer dielektrik sıvıları seçer, böylece gerilim sıvıyı kaçak veya kimyasal bozulma olmadan hızla hareket ettirip kabarıklıklar, stroklar ve titreşimler oluşturabilir.
Yumuşak Aktüatörleri Ölçekle Üretmek ve Sürmek
Bu zeki malzemeleri güvenilir cihazlara dönüştürmek ayrı bir mühendislik zorluğudur. Geleneksel üretim genellikle ince filmleri çerçevelere germek, yumuşak elektrotları boyamak veya basmak, katmanları üst üste koymak ve DFA’larda sıvıyı enjekte edip keseyi mühürlemek gibi zahmetli el işleri içerir. Makale, mürekkep püskürtme ve serigrafi, lif benzeri kasların ekstrüzyonu ve elektrotları ile dielektrikleri tek seferde yerleştirebilen çok malzemeli 3B baskı gibi daha yeni imalat yollarını inceler. Ayrıca farklı şekillerin farklı hareketlere nasıl yol açtığını açıklar: alanı genişleyen düz yamalar, yukarı fırlayan kubbeler, boyuna kısalan sarılmış silindirler ve bükülen veya titreşen yapılar. Bu malzemeler yaşlanabildiği, sızdırabildiği veya elektriksel bozulma ile arızalanabildiği için yazarlar ömür çalışmaları ve yaygın arıza modlarını özetler ve kıvılcım ya da delikten sonra kendini onarabilen tasarımlar için süren çalışmalara dikkat çeker.
Daha Akıllı Kontrol ve Yükselen Kullanımlar
Doğal kaslar gibi, yumuşak aktüatörlerin de kontrol edilmesi gerekir. Basit açık döngü şemaları yalnızca bir gerilim desenini besler, ancak bu malzeme ısındıkça veya sünek davranış gösterdikçe sapmalar olabilir. Daha gelişmiş yaklaşımlar sensörleri gömerek—veya aktüatörün kendi elektriksel sinyallerini kullanarak—gerinimi, kuvveti veya titreşimi gerçek zamanda ölçüp sürüş sinyalini buna göre ayarlar. Araştırmacılar şimdi yumuşak malzemelerin doğrusal olmayan, geçmişe bağımlı davranışıyla başa çıkabilen makine öğrenmesi ve pekiştirmeli öğrenme tabanlı denetleyicilerle denemeler yapıyor. Uygulama tarafında makale geniş bir yelpazeyi geziniyor: kendi ağırlığının katları kadar yük kaldırabilen yapay kaslar, yüzeyde yüzen veya uçan balık ve böcek benzeri robotlar, gerçekçi dokunma geri bildirimi sağlayan giyilebilir dokunsal bantlar ve uç parmak pedleri, mürekkepbalığı ve insan gözünden esinlenen zoom lensler ve ışık şekillendirici yüzeyler, şekil değiştiren yüzeyler ve bir gün zayıf kalplere ya da felçli yüz kaslarına yardımcı olabilecek kavramsal tıbbi cihazlar.
Laboratuvar Gösterilerinden Gerçek Dünyaya Geçişi Hâlâ Ne Engelliyor
Tüm vaatlerine rağmen, bu elektrik kasları ev yardımcıları, tıbbi implantlar veya kitlesel pazara yönelik giyilebilir cihazları güvenle çalıştırmadan önce hâlâ engellerle karşılaşıyor. Birçoğu kilovolt düzeyinde sürüş gerilimi gerektirir; bu da güvenlik ve elektronik tasarımını karmaşıklaştırır. Kısa testlerde mükemmel performans gösteren malzemeler milyonlarca döngü sonra sertleşebilir, kuruyabilir veya arızalanabilir. Üretim genellikle büyük ölçekli üretim için çok yavaş ve tutarsızdır. Ve mevcut polimerlerin çoğunu geri dönüştürmek veya biyobozundurmak hâlâ zordur. Yazarlar, ilerlemenin ölçekler arası ortak tasarıma bağlı olacağını savunuyor: düşük sertlik, yüksek elektriksel yanıt, dayanıklılık ve hatta kendini onarma özelliklerini birleştiren yeni yumuşak malzemeler; otomatik, veri odaklı üretim ve test yöntemleri; ve yerleşik algılama ve hafif yapay zekâyı kullanan kontrol sistemleri. Bu ilerlemeler bir araya geldiğinde, gelecek robotlara sadece güçlü ve hızlı değil, aynı zamanda güvenli, uyumlu ve sürdürülebilir kaslar sağlayabilir.
Atıf: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
Anahtar kelimeler: yumuşak robotik, dielektrik elastomer aktüatörler, dielektrik sıvı aktüatörler, yapay kaslar, dokunsal arayüzler