Clear Sky Science · tr
Kişiselleştirilmiş ve hedefe yönelik etkileşimli yardım için model öngörülü oyun kontrolü
Eğitim Ortağı Gibi Hissettiren Robotlar
Her zaman ne zaman yardım edeceğini, ne zaman biraz çabalamana izin vereceğini ve bir sonraki hamleni ne kadar güçlü yapmayı planladığını bilen bir antrenman partneri ya da fizyoterapist hayal edin. Bu makale, rehabilitasyonda ya da fabrikalarda kullanılan ekzoskeleton gibi temas halinde çalışan robotlara benzer bir sezgi kazandırmanın yolunu gösteriyor. Bir kişinin önümüzdeki bir-iki saniye içinde nasıl hareket etmeyi planladığını matematiksel olarak “tahmin ederek”, robot işi paylaşımı pürüzsüz hale getirebilir, yorgunluğu azaltabilir ve insanların nasıl hareket ettiği ve öğrendiği konusunda incelikle yönlendirme yapabilir.
Robotlarla Gücü Paylaşmak Neden Zordur
Bir robot bir kişiye fiziksel olarak bağlıyken—bir uzvu hareket ettirmede veya ağır bir nesneyi taşımada yardım ederken—ikisi de sürekli olarak itme ve tepki verme durumundadır. Geleneksel robot denetleyicileri çoğunlukla insanın ne planladığını görmezden gelir; sadece doğruluk veya enerji tasarrufu gibi performans hedeflerini takip ederler. Bu, robotu ya çok sert ve buyurgan ya da çok pasif ve yetersiz hale getirebilir. Gerçek insan partnerler daha iyi yapar: karşı tarafın nasıl hareket ettiğini hisseder, yeteneklerine uyum sağlar ve gevşemeden yoğun çabaya kadar farklı davranışları teşvik eder. Yazarlar, robotları bu tür etkileşime yaklaştırmak için robotun insanın hareket planını ve ne kadar çaba harcamaya istekli olduğunu açıkça modellemesi gerektiğini savunuyor.
İnsan–Robot Etkileşimine Oyun Teorisi Bakışı
Araştırmacılar stratejik etkileşimin matematiği olan oyun teorisi üzerine inşa ederek insanı ve robotu aynı işi paylaşan iki “oyuncu” olarak ele alıyor. Her birinin kendi hedefleri var: insan istenen hareketi takip etmek isterken mümkün olduğunca az çaba harcamayı amaçlıyor; robot ise hareket takibini iyileştirirken kişinin çabasını azaltmak istiyor. Kritik olarak, her ikisinin de doğal olarak hareketleri planlama şekillerini yansıtan yaklaşık bir ila iki saniyelik kısa bir ileri bakış penceresi içinde düşündüğü varsayılıyor. Bu pencere içinde ekip, ne insan ne de robot diğerini değiştirmeden kendi sonucunu iyileştiremeyeceği dengeli bir kuvvet düzeni olan Nash dengesini tanımlayan kompakt bir formül türetiyor. Bu denge, her an kimin ne kadar itmesi gerektiğini belirliyor.
Robotun İnsan Niyetini Okumasını Öğretmek
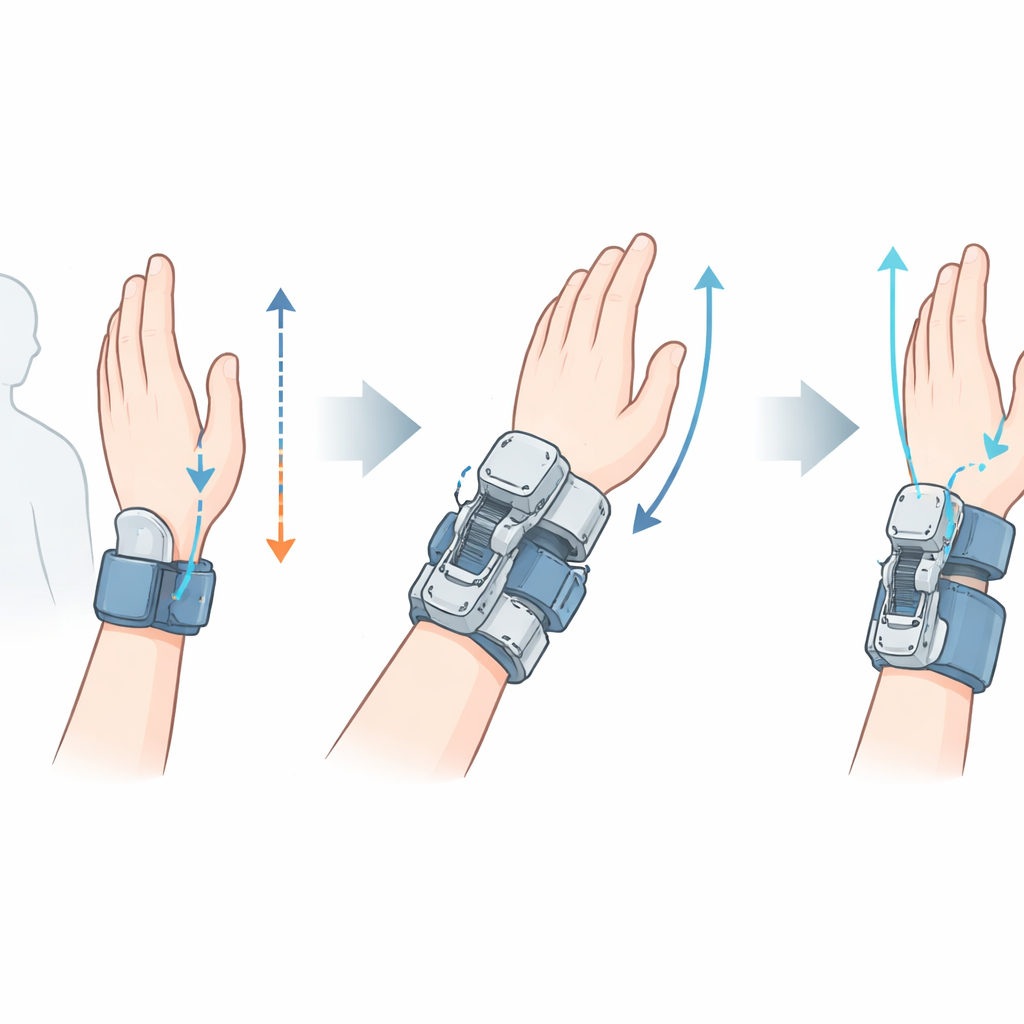
Robotun bu “hareket oyununu” oynaması için önce insanın doğruluk ile çaba arasında ne kadar ayrım yaptığı—kişiden kişiye ve zaman içinde değişen gizli bir tercih—tahmin edilmelidir. Yazarlar bunu ters oyun (inverse game) yaklaşımıyla çözüyor. Kişi hareket ederken sensörler eklem açısını ve ürettikleri torku ölçüyor. Denetleyici ardından son hareket ve kuvvet geçmişini en iyi açıklayacak insan tercihleri kümesini tekrar tekrar arıyor. Bu tercihler elde edildiğinde, kişinin önümüzdeki kısa dönemde nasıl davranması muhtemel olduğunu tahmin ediyor ve robotun optimal yardım kuvvetini hesaplıyor. Tüm bunlar, deneklerin elini hareketli bir hedefe göre izlemelerine yardımcı olan bir bilek ekzoskeletonunda gerçek zamanlı çalıştırılıyor.
İnsanlar ve Robotlar Koordine Olmayı Öğreniyor
Ekip denetleyicilerini otuz sağlıklı yetişkinle üç deneyde test etti. İlkinde, insanlardan hedefi aktif olarak takip etme ile pasif kalma arasında geçiş yapmaları istendi. Denetleyici, kişinin doğruluğa ne kadar önem verdiğine dair iç tahminini hızlıca ayarladı; aktif fazlarda yükseldi ve rahatladıklarında sıfıra yakın düştü. İkinci deneyde, katılımcılar robot yardımıyla ve robotsuz denemeler arasında geçiş yaptı. Yeni denetleyiciyle robot, insan eklem çabasını ve kas aktivitesini düşürürken izleme doğruluğunu artırdı. Tekrarlanan denemelerde, her kişinin etkileşim deseni kararlı, bireysel bir “denge”ye yerleşti ve insan ile robot kuvvetleri arasındaki korelasyon arttı—bu, karşılıklı anlayışın geliştiğinin kanıtı. Üçüncü deneyde araştırmacılar, robotun kişinin çabasını azaltma eğilimini ayarlayan tek bir yardım düğmesi olan bir meta-parametre tanıttı. Bu düğmenin çevrilmesi, görev performansını bozmadan insanların katkıda bulunduğu çaba miktarını düzgün bir şekilde değiştirdi.
Tek Bir Düğmeyle Davranışı Yönlendirmek
Yardım meta-parametresi tasarımcılara tek bir denetimle etkileşim stilleri yelpazesini kullanma imkanı veriyor: neredeyse hiç yardım etmeyen seviyeden, çabanın eşit paylaşıldığı durumlara kadar ve robotun öne çıktığı, insanın gevşeyebileceği neredeyse tam desteğe uzanan aralık. Ara kademelerde, insanlar genellikle robotla en iyi şekilde koordine oldular ve her biri yaklaşık yarı yük taşıdı. Çıkarılan insan tercihleri deseni, neredeyse her yardım seviyesinde her birey için tutarlı kaldı—robot neredeyse her şeyi yaptığında davranışlar daha homojen hale geldi çünkü insanlar büyük ölçüde katılımı bıraktı. Bu, robotun hem bireysel kontrol stillerini ortaya çıkarabildiğini hem de örneğin eğitim döneminin bir aşamasında kullanıcılardan daha fazla, başka bir aşamada daha az çaba göstermelerini nazikçe teşvik edebileceğini gösteriyor.
Rehabilitasyon ve İş İçin Ne Anlama Geliyor
Bir uzmana göre ana mesaj, bu denetleyicinin robotları sert makinelerden çok akıllı partnerler gibi davranmaya yaklaştırmasıdır. Bizim nasıl hareket etmeyi planladığımızı tahmin ederek ve ne kadar yardım edeceklerini ayarlayarak, robotlar gerektiğinde çabamızı azaltabilir, faydalı olduğunda daha fazla çalışmamızı teşvik edebilir ve hareketleri doğru ve kararlı tutabilir. Aynı matematiksel çerçeve, robottan hastaya doğru çabanın kademeli olarak kaydırılacağı rehabilitasyon için veya insanların ve robotların yükleri güvenli ve verimli bir şekilde paylaştığı işbirlikçi üretim için ayarlanabilir. Özetle, çalışma insanların kendileriyle “aynı oyunu oynayan” bir robota doğal olarak uyum sağladığını gösteriyor ve daha kişiselleştirilmiş, hedefe yönelik etkileşimli yardım biçimlerinin yolunu açıyor.
Atıf: Hafs, A., Farr, A., Verdel, D. et al. Model predictive game control for personalized and targeted interactive assistance. Commun Eng 5, 57 (2026). https://doi.org/10.1038/s44172-026-00605-8
Anahtar kelimeler: insan-robot etkileşimi, ekzoskeleton yardımı, oyun teorik kontrol, motor rehabilitasyon, paylaşılan kontrol