Clear Sky Science · tr
Makine öğrenimi destekli gerçek zamanlı akustik tuzaklama: zamanla değişen çok ortamlı ortamlarda manyetik rezonans görüntüleme yönlendirmeli mikrobalik manipülasyonuna doğru
Sesi ve Görüntülemeyi Kullanarak Küçük İlaç Taşıyıcılarını Yönlendirmek
Modern kanser tedavileri, sağlıklı dokuyu korurken doğrudan tümöre ilaç ulaştırabilen akıllı ilaç taşıyıcılarına giderek daha fazla dayanıyor. Bu çalışma, manyetik rezonans görüntüleme (MRI) tarafından yönlendirilen ultrason "tuzakları" kullanarak vücut içinde bu tür taşıyıcıları yönlendirmenin geleceğe dönük bir yolunu araştırıyor. Ses dalgalarını, tıbbi görüntülemeyi ve makine öğrenimini birleştirerek, araştırmacılar mikroskobik ilaç baloncuklarını nefesle birlikte hareket eden tümörlerin yanında sabit tutmayı amaçlıyor.
Mikroskobik Baloncukları Tutmanın Önemi
İlaç taşıyan mikrobalonlar damarlar içinde yol alır ve ultrasonla tetiklendiğinde taşıdıkları yükü serbest bırakabilirler. Zorluk, bu baloncukların yeterli sayıda ve yeterince uzun süre doğru noktada, vücudun derinliklerinde tutulmasını sağlamaktır. Ultrason, küçük nesneleri temassız olarak akışkan içinde tutan görünmez kuvvet cepleri—akustik tuzaklar—oluşturabilir. MRI ise doku ve ultrason etkilerinin desenini, organların içinde bile görselleştirebilir. Bu iki aracı bir araya getirmek, ilaçların tek başına sağladığından daha hassas şekilde taşıyıcıları tümör çevresinde yoğunlaştırmanın bir yolunu sunar. Ancak gerçek insanlarda yağ, kas, organlar ve hareketli akciğerler gibi farklı doku tipleri ses dalgalarını büküp bozduğu için, stabil bir tuzağı tam tümör konumunda oluşturmak ve sürdürmek çok zor hale gelir.
Hareketli, Katmanlı Bir Vücudun Sorunu
Hava veya su gibi basit ortamda mühendisler, faz dizili ultrason vericilerinin küçük nesneleri itmek, çekmek ve döndürmek için nasıl kullanılacağını zaten biliyor. Ancak vücut içinde ses, farklı yoğunluk ve hızlara sahip birçok katmanı geçmek zorundadır ve bu katmanlar arasındaki sınırlar kırılma ve bozulmaya yol açar. Geleneksel hesaplamalı yöntemler, prensipte bu durumu vericinin her birinden hedef noktaya sesin ne kadar sürede ulaşacağını hesaplayarak düzeltebilir. Fakat bu tür yaklaşımlar bedeni milyonlarca küçük bloğa böler ve dalga yayılımını her blok üzerinden simüle eder—çok zaman alan bir süreçtir ve dokular neredeyse tamamen sabit kaldığında işe yarar. Sadece nefes almak bile karın dokularını birkaç milimetre kaydırabilir ve bu da önceden hesaplanmış herhangi bir çözümü hızla geçersiz kılar.
Ses Yollarını Tahmin Etmeyi Öğreten Bir Model
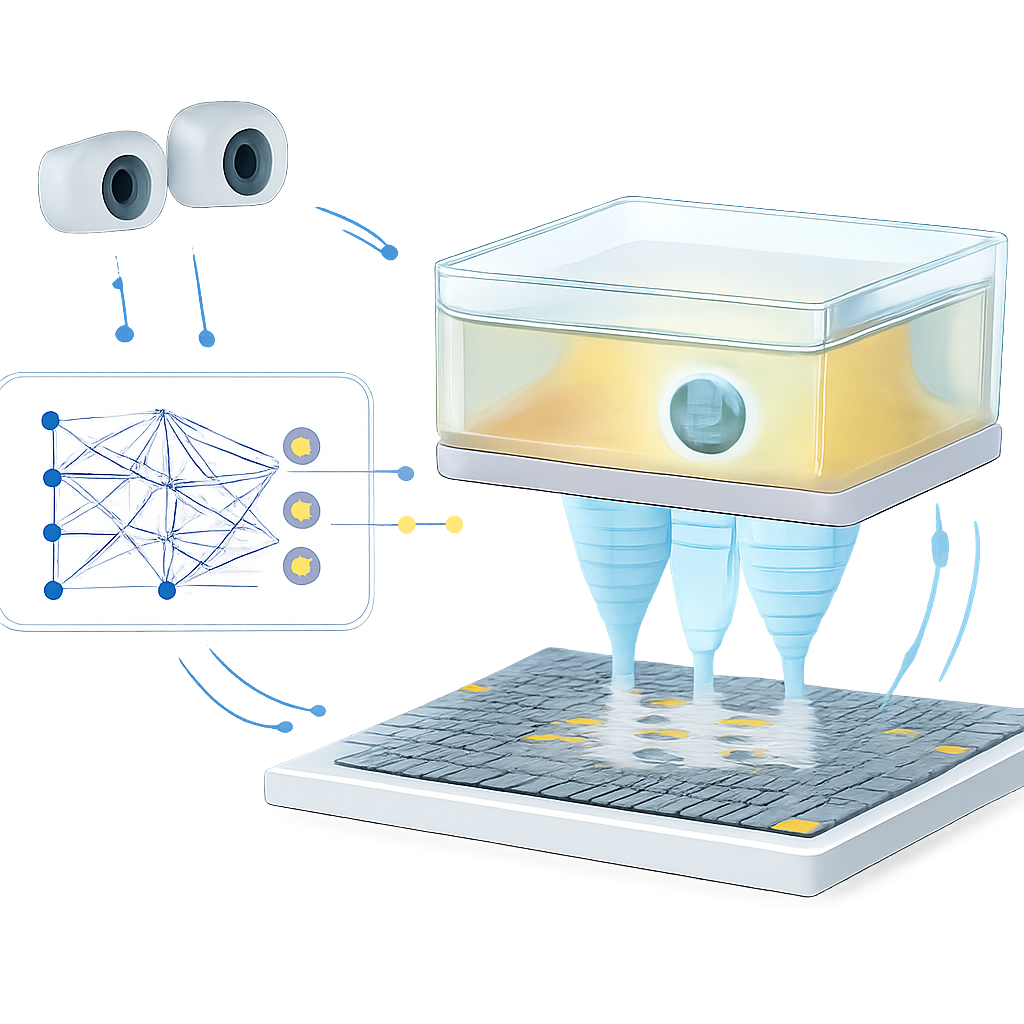
Yazarlar bu darboğazı, hızlı bir kestirme yol işlevi gören öğrenmeye dayalı bir modelle ele alıyor: her seferinde ses dalgalarını simüle etmek yerine, sinir ağını her ultrason darbesinin hedefe ulaşması için ne kadar süre gerekeceğini tahmin edecek şekilde eğitiyorlar. Önce, sesi farklı doku katmanlarından geçişini taklit etmek için ince bir plastik filmle havadan ayrılmış gaz dolu bir odacık kullanarak ayrıntılı bir sanal ortam kuruyorlar. Fizik tabanlı bir simülatör kullanarak, 14’e 14 bir ultrason dizisine göre birçok hedef arasındaki ses yolculuk sürelerinden oluşan bir eğitim seti oluşturuyorlar. Ayrıca hareketi taklit etmek için odacığı iki yönde kaydırıyor ve konumunu, gelecekte MRI ile görülebilecek işaretçilerin hastanın nefes almasını nasıl takip edeceğine benzer şekilde üç görsel işaretçiyle tanımlıyorlar. Eğitilmiş ağ, istenen tuzak pozisyonunu ve odacık pozisyonunu doğrudan 196 vericinin gerekli zamanlama desenine eşliyor ve yaklaşık 26 milisaniyede mikro-saniye düzeyinde doğruluk sağlıyor.
Görüş ve Hızlı Güncellemelerle Döngüyü Kapatmak
Hız tek başına yeterli değil; çevre beklenmedik şekilde değiştiğinde tuzağın uyum sağlaması da gerekiyor. Bunu göstermek için ekip kapalı döngü kontrol sistemi kuruyor. Stereo kameralar, hareketli odacık içinde akustik tuzak tarafından havada tutulan küçük bir polistiren taneciğini izliyor. Tanecik hedefinden belirli bir eşikten fazla saptığında sistem hedef pozisyonu hafifçe kaydırıyor, güncellenmiş koordinatları ve odacık duruşunu öğrenme modeline veriyor ve diziyi sürükleyen faz desenini hızla yeniliyor. Deneylerde sistem faz desenini saniyede 15 defaya kadar güncelleyebiliyor ve taneciği H-, K- ve U- şeklindeki yollara ortalama yaklaşık 1 milimetre hata ile yönlendiriyor—bu, bazı klinik odaklanmış ultrason sistemlerinin konumlama hassasiyetine karşılaştırılabilir. Aynı geribildirim ilkesi, odacık hareket ettiğinde taneciğin amaçlanan noktadan ne kadar süre ayrıldığını azaltıyor; bu da kontrol döngüsünün hareketi ve plastik film ile destek yapısından kaynaklanan modellenmemiş etkiyi telafi edebildiğini gösteriyor.
Gelecekteki Tedaviler İçin Anlamı
Uzman olmayan biri için temel mesaj, araştırmacıların bir gün ilaç yüklü baloncukları tümörün yanına park edebilecek ve hastanın nefes alırken bile onları orada tutabilecek uzaktan kumandalı, temassız bir "çekim ışını" türü bir sistem inşa ettiğidir. Makine öğrenimi modeli ağır simülasyonların yerini hızlı bir tahminçiyle alırken, kameralar (ve nihayetinde MRI işaretçileri) vücudun nasıl hareket ettiğini sisteme bildiriyor ve tuzak anlık olarak yeniden ayarlanabiliyor. Mevcut çalışma havayı, gazları ve plastik malzemeyi gerçek dokular yerine kullanıyor ve gerçek mikrobalonlar yerine plastik bir tanecik havada tutuyor olsa da, hareketli, katmanlı bir ortamda gerçek zamanlı kontrolü gösteriyor. Daha güçlü donanım, daha yüksek ultrason frekansları ve MRI tabanlı hareket takibi ile bu yaklaşım, ilaçları vücudun derinliklerine daha doğru ve güvenli biçimde ulaştıran MRI yönlendirmeli, robot destekli ultrason terapilerine dönüşebilecek bir klinik araca dönüşebilir.
Atıf: Wu, M., Li, X. & Tang, T. Machine learning-facilitated real-time acoustic trapping in time-varying multi-medium environments toward magnetic resonance imaging-guided microbubble manipulation. Commun Eng 5, 52 (2026). https://doi.org/10.1038/s44172-026-00600-z
Anahtar kelimeler: akustik tuzaklama, MRI ile yönlendirilen terapi, mikrobalon ilaç teslimatı, ultrasonda makine öğrenimi, invaziv olmayan robotik manipülasyon