Clear Sky Science · tr
Sentetik Röntgen destekli izleme ve minyatür tıbbi cihazların kontrolü
Daha Küçük Aletler, Daha Güvenli Ameliyatlar
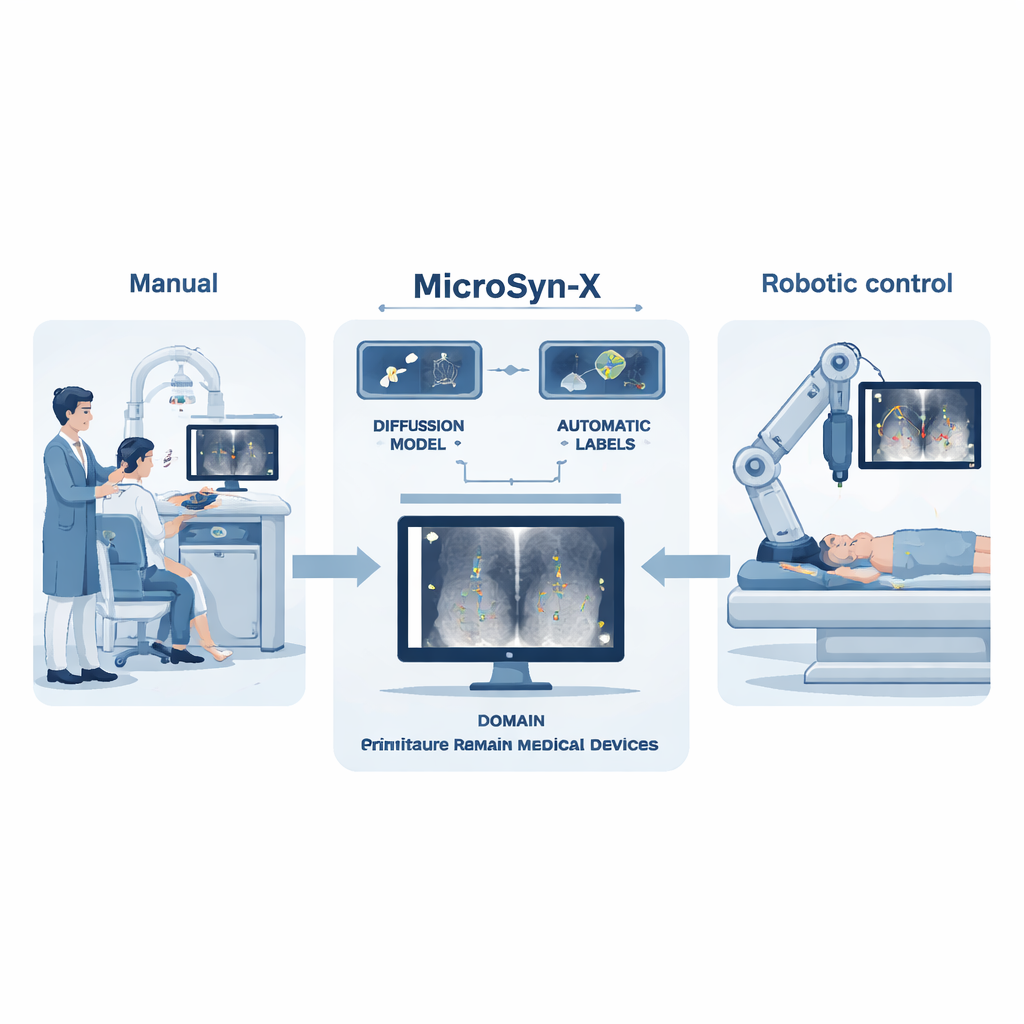
Cerrahlar, damarlarda ve diğer dar geçitlerde sürünerek ilaç veren, tıkanmış arterleri açan veya vücudun derinliklerinden hayati sinyaller ölçen kablosuz, çok küçük tıbbi araçları kullanmaya başlıyor. Bu minyatür tıbbi cihazlar daha nazik müdahaleler ve daha hızlı iyileşme vaat ediyor—ancak doktorlar bunları gerçek zamanlı olarak güvenle görebilip yönlendirebilirse. Bu makale, bilgisayarları bu küçük cihazları röntgen görüntülerinde izleyecek şekilde eğitmenin yeni bir yolunu, MicroSyn-X’i tanıtıyor; bu yaklaşım daha hassas ve daha az invaziv ameliyatların yolunu açıyor.
Görünmez Yardımcılarla İlgili Sorun
Günümüzün cerrahi görüntülemede temel aracı X-ışını floroskopidir; kemiklerin, damarların ve aletlerin hareketli gölgelerini ekranda gösterir. Ancak minyatür cihazlar o kadar küçük ve sönük ki genellikle gürültülü arka plana karışırlar. Kemik, metal aletler veya kontrast boyalar tarafından gizlenebilirler ve yumuşak ya da sıvı robotlar hareket ederken sürekli şekil değiştirir. İnsan operatörler ekranı dikkatle izlemek ve mıknatısları veya kateterleri elle ayarlamak zorundadır; bu yavaş ve yorucu bir süreç olup hata riskini artırır. Bilgisayarla görmeyi—kendi başına “görebilen” yazılımları—eğitmek yardımcı olabilir, fakat genellikle çok büyük, özenle etiketlenmiş görüntü koleksiyonlarına ihtiyaç duyar. Bu yeni cihazlar için böyle veri setleri neredeyse mevcut değildir; çünkü toplamak maliyetli, zaman alıcıdır ve hasta gizliliğiyle sınırlıdır.
Sahte Ama Gerçekçi Röntgenlerle Bilgisayarlara Öğretmek
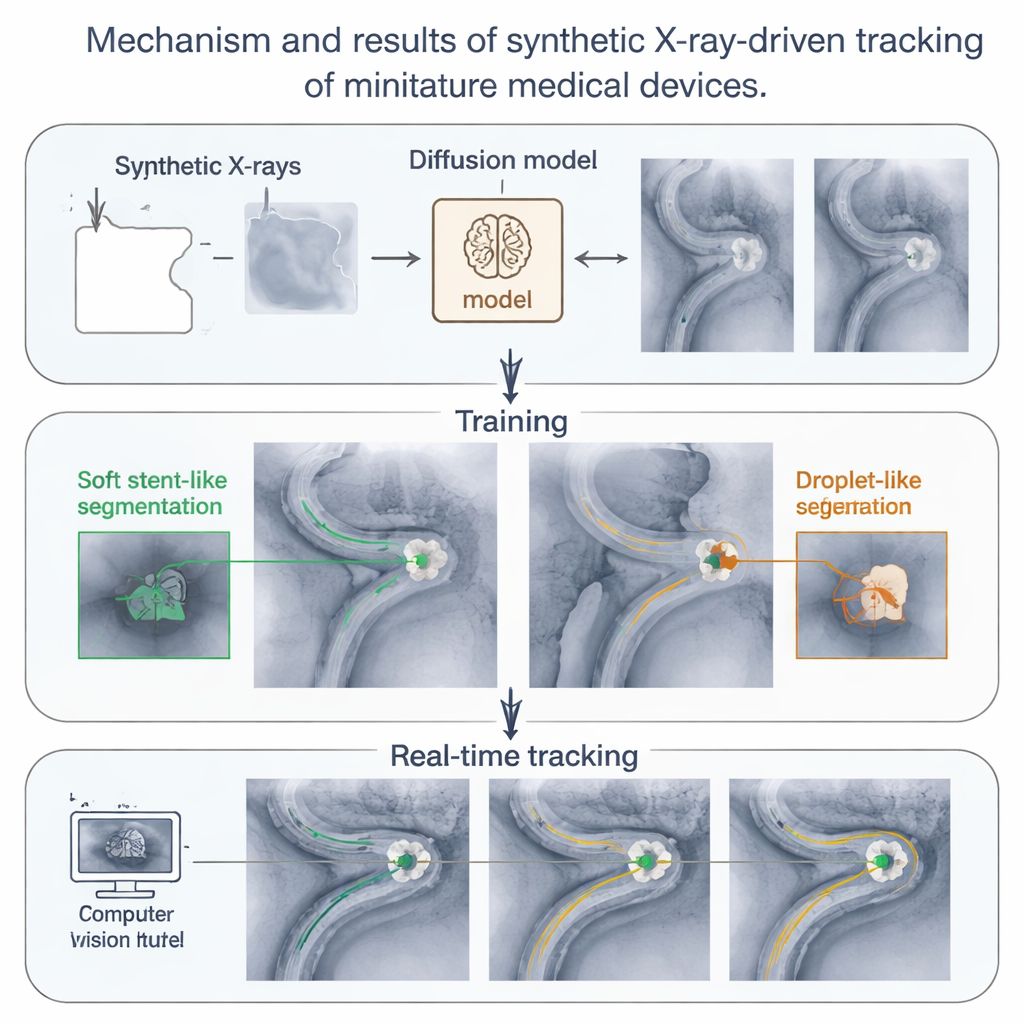
MicroSyn-X, öğrenme algoritmasına her cihazın tam olarak nerede olduğunu söyleyen yerleşik etiketlerle birlikte son derece gerçekçi röntgen görüntüleri yaratarak bu veri darboğazını çözüyor. Önce sistem, organların, kemiklerin ve cerrahi aletlerin gerçekçi röntgen arka planlarını üretmek için bir difüzyon modeli gibi modern bir görüntü üreteci kullanıyor; bunu basit istemler ve doku, metal ile sıvı dolu kanalları kabaca çizen maskeler yönlendiriyor. Ardından minyatür cihazların görüntüleri—ya temiz bir arka planda bir kez fotoğraflanmış ya da sıvı damlacıkları için matematiksel olarak çizilmiş—bu sahnelere dijital olarak harmanlanıyor, böylece gerçekten vücut içindeymiş gibi görünmeleri sağlanıyor. Bilgisayar her cihazın tam olarak nerede yerleştirildiğini bildiğinden, hassas konturlar ve sınır kutuları otomatik olarak oluşturuluyor ve zahmetli insan etiketlemesi ortadan kalkıyor.
Kontrollü Kaosla Gerçek Dünyaya Hazırlık
MicroSyn-X’in önemli yeniliklerinden biri “alan rastgeleleştirmesi”dir; sentetik görüntülere kasıtlı olarak çok çeşitli değişiklikler enjekte edilir. Sistem organ şekillerini, cihaz konumlarını, parlaklığı, gürültü seviyesini ve hatta cihazların kemik veya aletler tarafından ne kadar gizlendiğini otomatik olarak değiştirir. Ayrıca sıvı robotlar için birçok farklı şekil oluşturur; bunlar gerilebilir, sürüler halinde bölünebilir ve yeniden birleşebilir. Öğrenme algoritmasını binlerce hafifçe farklı durumla—gerçekte nadir veya hasta üzerinde yakalanması pratik olmayan bir çok durum dahil—karşı karşıya bırakarak, yazarlar modelleri cihazların yüzeysel desenleri yerine temel görsel ipuçlarına odaklanacak şekilde eğitir. Testler, yalnızca bu sentetik görüntülerle eğitilmiş modellerin gerçek röntgenlerle eğitilmiş modellere kıyasla, özellikle düşük kontrastlı, yüksek gürültülü veya yoğun örtüşme içeren zor durumlarda eşdeğer veya daha iyi performans gösterebildiğini ortaya koyuyor.
Bilgisayar Ekranından Ameliyathanedeki Robota
Araştırmacılar yazılım gösterimlerinin ötesine geçip MicroSyn-X’i doğrudan bir robotik sisteme bağlıyor. Bir robot kol, doku yakınında güçlü bir mıknatıs tutarken C-kollu bir floroskop X-ışını görüntüleri yakalıyor. MicroSyn-X ile eğitilmiş görme modeli her karede yumuşak stent şeklindeki robotları ve sıvı damlacıklarını buluyor ve bir izleme algoritması bu tespitleri cihazlar kemiğin arkasında geçici olarak kaybolsa bile düzgün yollara birleştiriyor. Bu geri bildirim kullanılarak robot, cihazları bükülen yapay damarlardan, vücut dışındaki gerçek hayvan organlarından ve tavşanlar ile sıçanlardaki canlı arterlerden geçiriyor. Sistem aynı anda birden fazla cihazı başarıyla yönlendiriyor, dallanan damarlarda onları takip ediyor ve manyetik kontrol altında bölünüp birleşen sıvı damlacık sürülerini gerçek zamanlı, zorlayıcı görüntüleme koşullarında izliyor.
Daha Akıllı, Daha Az İnvaziv Bakıma Doğru
Basitçe söylemek gerekirse, bu çalışma bilgisayarların nadir gerçek röntgenler yerine özenle hazırlanmış büyük “sahte” röntgen kütüphanelerinde pratiğe dayanarak vücut içinde küçük cerrahi aletleri güvenli biçimde izlemeyi öğrenebileceğini gösteriyor. MicroSyn-X, sentetik görüntülemeyi robotik için pratik bir motor haline getiriyor: gerçekçi eğitim verisi üretiyor, görme modellerini eğitiyor ve çıktılarını zaten canlı hayvanlarda işe yarayan manyetik navigasyon sistemine besliyor. Bu yöntemler olgunlaşıp daha karmaşık vakalarda test edildikçe, cerrahlara daha hassas ve daha az yorucu müdahaleler yapmada yardımcı olabilir ve içten dışa doğru tedaviyi sessizce iyileştiren minyatür robot filolarının olduğu bir geleceğe bizi yaklaştırabilir.
Atıf: Wang, C., Kang, W., Sun, M. et al. Synthetic X‑ray‑driven tracking and control of miniature medical devices. Nat Mach Intell 8, 276–291 (2026). https://doi.org/10.1038/s42256-026-01190-3
Anahtar kelimeler: minyatür tıbbi cihazlar, röntgen görüntüleme, sentetik veri, tıbbi robotik, bilgisayarla görme