Clear Sky Science · tr
İç içe geçmiş etkileşim ağı, kolektif davranışta tepki verme yeteneğini artırıyor
Hayvan Kalabalıkları Nasıl Bu Kadar Keskin Senkronize Kalıyor
Büyük hayvan grupları sık sık tek bir canlıymış gibi dönüşler yapıyor, kaçıyor veya manevra alıyor gibi görünür. Bu makale, bir balık grubunun — ve onlardan esinlenen robot sürülerinin — içindeki gizli "kim kimi takip ediyor" yapısının, koşullar değiştiğinde tüm kalabalığın hızlı ve güvenilir şekilde tepki vermesine nasıl izin verdiğini inceliyor.
Hareket Eden Bir Kalabalığın İçindeki Rehberlik Katmanları
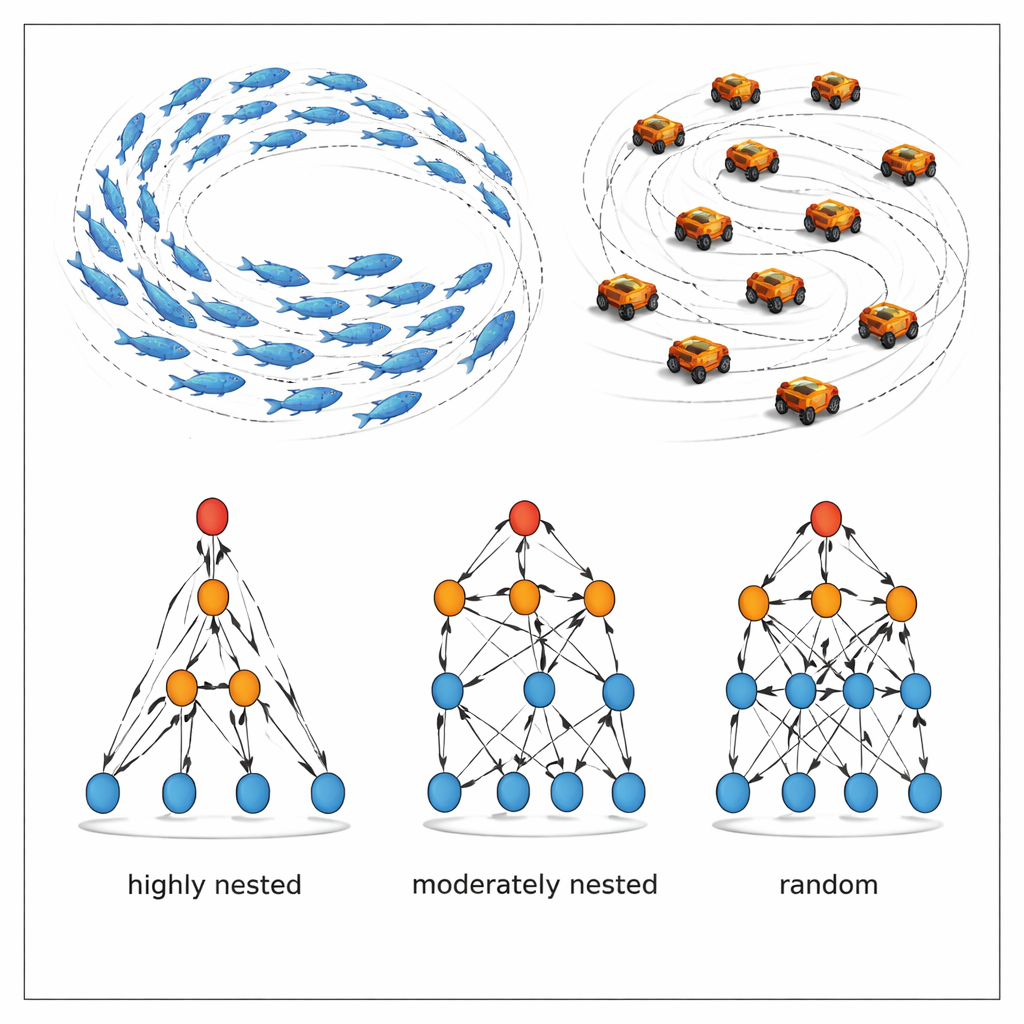
Bir balık sürüsünün tehlikeden uzaklaşmak için döndüğünü izlerken, her balığın komşularını anında kopyaladığını düşünmek cazip gelebilir. Yazarlar gerçeğin daha incelikli olduğunu gösteriyor: bazı balıkların birçok diğerini etkilediği, bazılarının ise ağırlıklı olarak takip ettiği görünmez bir rehberlik düzeni var. Bu düzen katı bir pecking order (başkan-sıra) değil; grubun yaptığı hareket türüne göre değişen esnek bir lider–takipçi ağından oluşuyor. Araştırmacıların odaklandığı temel yapısal özellik "iç içe geçmişlik" (nestedness) olarak adlandırılıyor: üst düzey liderler yalnızca en yakın takipçilerini yönlendirmiyor, zincirin daha aşağı seviyelerindeki birçok balığı dolaylı olarak da etkiliyorlar.
Balık Sürüleri Hızlı Manevralar Hakkında Ne Söylüyor
Çalışma ekibi, sığ, dairesel bir tankta yüzen küçük rummy‑nose tetra sürülerini filme alarak her balığın zaman içindeki konumunu ve yönünü izledi. Bu yörüngelerden kimin genellikle önce hareket ettiğini, kimin daha sonra tepki verdiğini yeniden inşa ederek her grup için yönlendirilmiş bir etki ağı kurdular. Ayrıca sürünün ne kadar keskin döndüğünü (eğrilik) ve balıkların ne kadar sıkı hizalandığını (polarizasyon) ölçtüler. Grubun sık sık yön değiştirdiği hızlı, dolambaçlı manevralar yaptığı durumlarda, altta yatan ağın güçlü bir şekilde iç içe geçmiş olduğunu buldular: birkaç balık birçok kişiyi etkiliyor ve etki düzeni düzgün bir üçgensel kademeyi andırıyordu. Buna karşılık, sürü sabit bir yönde sakinçe süzüldüğünde ağ daha az iç içe geçmiş ve daha eşitlikçiydi; buna rağmen balıklar iyi hizalanmış kaldı.
İdealleştirilmiş Ağlarda Bilgi Akışını Test Etmek
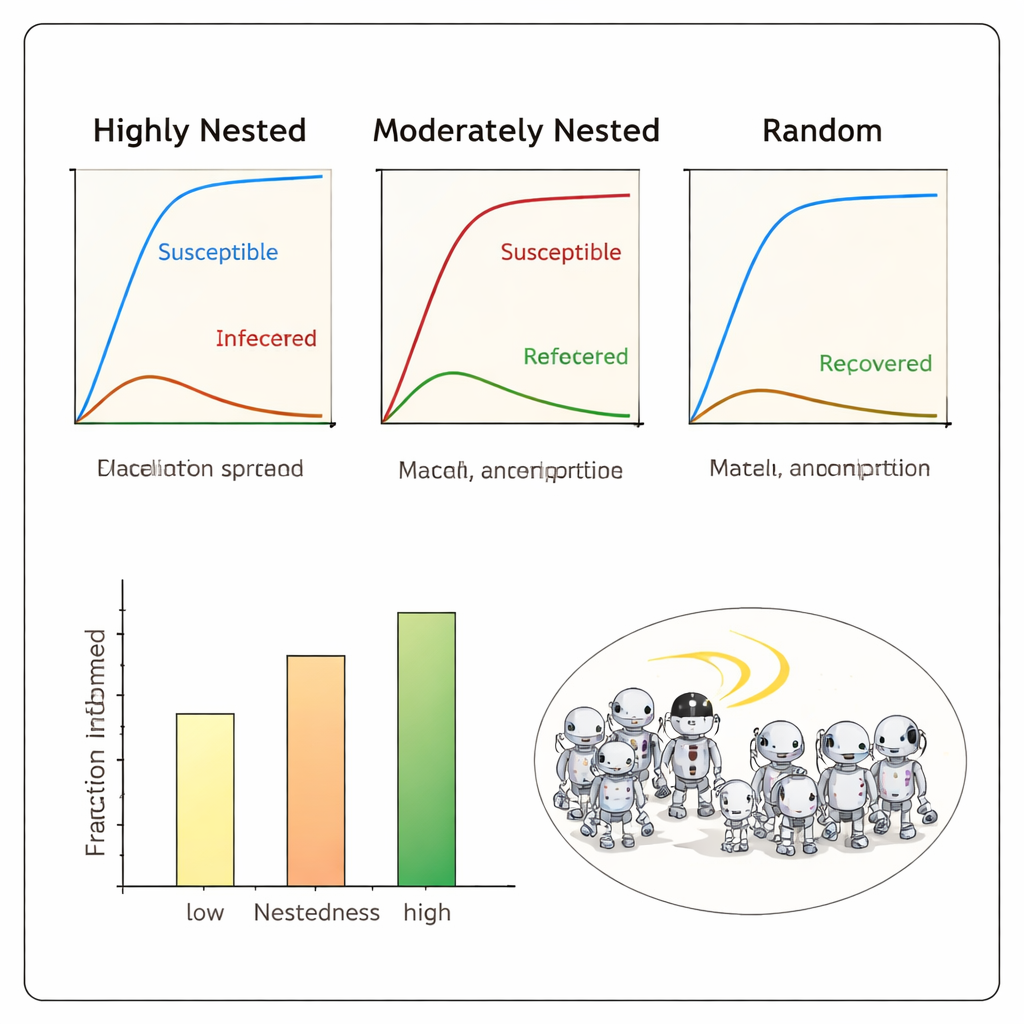
İç içe geçmiş yapıların neden yardımcı olabileceğini anlamak için yazarlar sıklıkla salgın modellerinde kullanılan basit bir yayılma modeline yöneldiler. Burada bir düğümün "enfekte" olması, bir hastalığı değil, yönsel bir ipucunu alıp ilettiği anlamına geliyor. Mükemmel iç içe geçmiş lider–takipçi ağları, kısmen iç içe geçmiş ve rastgele ağlarla karşılaştırdılar; toplam bağlantı sayısını aynı tuttular. En iç içe durumda, tepeden başlatılan bir sinyal neredeyse her düğüme çabucak ulaştı ve düğümler nispeten hızlı iyileşip (iletmeyi bırakıp) sinyali kesintiye uğratsa bile bu gerçekleşti. Ağ rastgeleleştikçe ve iç içe geçmişlik azaldıkça sinyal tıkandı: birçok düğüm bilgisiz kaldı, aktif ileticilerin zirve sayısı düştü ve aynı kapsama ulaşmak için modele çok daha fazla başlangıç sinyali kaynağı gerekirdi.
Denklemlerden Dönüş Yapan Robot Kalabalıklarına
Çalışma daha sonra bu yapısal avantajların gerçek harekete dönüşüp dönüşmediğini sordu. Yazarlar, her bireyin kimin takip edileceğini bir komşunun hareketinin ne kadar çarpıcı göründüğüne göre seçtiği, fakat bir bükülme içeren "kendi kendine itişli" bir sürü modeli kurdular: kural, tercihli olarak daha iç içe geçmiş bir hiyerarşi oluşturuyor; daha "dikkat çekici" hareket edenler birçok kişi için lider haline geliyor. Bu mükemmel iç içe geçmiş düzeni iki yaygın alternatife karşılaştırdılar: her komşunun eşit söz sahibi olduğu bir düzen ve etkilerin hareket ipuçlarına göre düzgünce ağırlıklandırıldığı bir başka düzen. Birkaç bilgilendirilmiş birecin komut ettiği tekrarlanan, büyük dönüşler yapması istenen simüle gruplarda, iç içe geçmiş düzen kalabalığın hedef yön desenini daha yakından ve daha küçük gecikmelerle eşlemesini sağladı; harekete önemli miktarda gürültü eklendiğinde bile.
Gerçek Robotlar, Sürüden İlham Alan Balıklar Gibi Davranıyor
Son olarak, araştırmacılar iç içe geçmiş ağ kontrolünü düz bir arenada hareket eden elli küçük tekerlekli robota uyguladılar. "Sabit kalma" görevinde, tek bir bilgilendirilmiş robot grubun bir bölge etrafında dönmesini sağlamaya çalıştı. Geleneksel ağırlıklı‑komşu kuralıyla, sürünün yolu pürüzsüz ve ağır başlıydı, yalnızca hafif eğriler gösteriyordu. İç içe geçmiş kuralla, robotlar daha keskin, daha kararlı dönüşler gerçekleştirdi ve bilgilendirilmiş robotun değişikliklerini yakından izledi. Bilgilendirilmiş bir robotun öngörülemez yön değişimleri yaptığı "takip" görevinde, iç içe geçmiş kontrol edilen sürü yine hem konum hem yön açısından daha yakın kaldı; karşılaştırma sürüsü birçok dönüşü yumuşattı veya kaçırdı.
Balıklar ve Robotların Ötesinde Neden Önemli
Günlük ifadeyle, çalışma gösteriyor ki bir kalabalığın nasıl kablolanmış olduğu, üyelerinin ne kadar duyarlı olduğuyla en az aynı derecede önem taşıyor. Güçlü bir şekilde iç içe geçmiş etki ağı — üst düzey liderlerin birçok kişiye ulaştığı katmanlı bir zincir — grupların önemli sinyallere daha hızlı ve daha güvenilir tepki vermesini sağlıyor, gürültü tarafından boğulmadan. Bu bulgular, biyologların hayvan sürülerini yorumlamasına yardımcı olabilir, riskli ortamlarda hızlı tepki vermesi gereken drone veya sualtı‑robot ekiplerinin tasarımını yönlendirebilir ve hızlı, koordine eylemin gerekli olduğu insan ağlarının nasıl organize edileceği konusunda bile fikir verebilir.
Atıf: Zheng, Z., Tao, Y., Xiang, Y. et al. Nested interaction network enhances responsiveness in collective behavior. Commun Phys 9, 75 (2026). https://doi.org/10.1038/s42005-026-02510-0
Anahtar kelimeler: kolektif davranış, balık sürüsü, sürü robotları, bilgi transferi, ağ hiyerarşisi