Clear Sky Science · tr
1024 iletkenlik seviyesine sahip MoS2 memtransistör entegreli sensör füzyonu için çok aşamalı Kalman filtreleme sistemi
Daha Güvenli Sürücüsüz Araçlar için Daha Akıllı Algılama
Günümüzün sürücüsüz otomobilleri yolu anlamak için bir dizi sensöre dayanıyor, ancak bu bilgileri hızlı ve verimli biçimde harmanlamak inanılmaz derecede zor. Bu çalışma, memtransistör adı verilen yeni bir tür küçük elektronik cihazın, sensör füzyonu olarak adlandırılan bu harmanlama sürecini hızlandırıp basitleştirebileceğini gösteriyor. Temel hesaplamaları iri dijital çiplerden yalın analog donanıma taşıyarak araştırmacılar hem enerji tüketimini hem de gecikmeyi önemli ölçüde azalttı; bu da kötü hava koşulları, görüş engelleri ve kalabalık sokaklarla başa çıkabilen daha güvenli, daha hızlı yanıt veren otonom sistemlere işaret ediyor.
Neden Birçok Göz Birtekinden Daha İyidir
Bugünün test pistleri ve otoyollarında otonom araçlar kameralar, lazer menzil ölçer (LiDAR), milimetraveteli radar ve aracın hareketini izleyen hareket sensörleri karışımıyla çevreyi gözler. Her birinin kendi güçlü ve zayıf yanları var: LiDAR kamyonlar veya binalarla engellenebilir, radar ince ayrıntılarda zorlanır ve hareket sensörleri tek başına kullanıldığında zamanla sapma gösterir. Etrafındaki trafiğin güvenilir bir tasvirini elde etmek için araç, bu kusurlu görüşleri birleştirip nesnelerin nerede olduğuna ve nasıl hareket ettiklerine dair tutarlı bir tahmine dönüştürmek zorunda. Kalman filtresi olarak bilinen matematiksel araç, bunu gerçek zamanlı yapmak için başvurulan yöntemlerden biri oldu; ancak geleneksel biçimde analog sensörlerle dijital mantık arasında verileri tekrar tekrar taşıyan dijital işlemcilerde çalışırken güç tüketiyor ve gecikme üretiyor.

Yeni Bir Elektronik Yapıtaşı
Takım bu sorunu, tek atom kalınlığında molibden disülfür (MoS2) yarıiletkeninden yapılmış bir cihaz kullanarak ele alıyor. Memtransistörleri, elektriksel iletkenliği akım kapatıldığında bile hatırlayabilen bir hafıza öğesi ile bir transistörün rolünü tek bir üç terminalli yapıda birleştiriyor; iletkenlik pürüzsüz biçimde ayarlanabiliyor ve korunabiliyor. Elektrik alanlarıyla malzemenin atomik kafesindeki küçük boşlukları dikkatle kontrol ederek, cihaz geniş bir aralık boyunca güvenilir şekilde 1024 ayrı iletkenlik seviyesini tutabiliyor ve bunları bir yıldan uzun süre koruyabiliyor. Aynı derecede önemli olarak, kontrol voltajı tarandığında bu seviyeler neredeyse doğrusal bir şekilde değişiyor; bu da Kalman filtresindeki istenen matematiksel ağırlığı memtransistörün fiziksel ayarına doğrudan eşleştirmeyi mümkün kılıyor.
Matematiği Donanıma Çevirmek
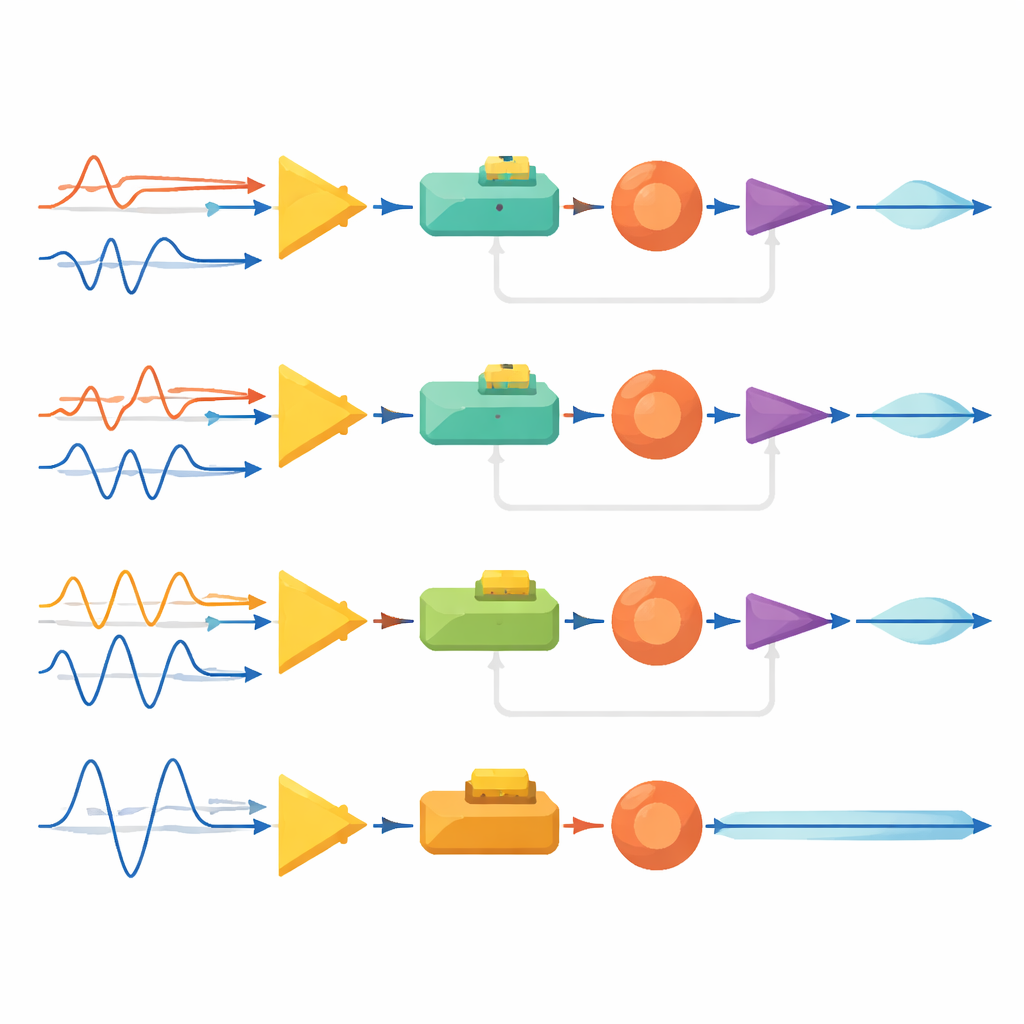
Bu cihaza dayanarak araştırmacılar, sensör voltajları üzerinde doğrudan çalışan çok aşamalı bir Kalman filtresinin analog bir versiyonunu tasarlıyor. Devre, bir aracın konumunu, hızını ve ivmesini tahmin eden zincirlenmiş üç aşamadan oluşuyor. Her aşama içinde çıkarma, entegrasyon, toplama ve diferansiyasyon gibi temel işlemler kompakt analog modüller tarafından yürütülüyor. Filtreye ne kadar yeni sensör okumalarına güvendiğini söyleyen kritik "kazanç" faktörü memtransistörün iletkenliği kullanılarak uygulanıyor. Bir kapı voltajını ayarlayarak sistem, yazılımı yeniden yazmadan LiDAR, radar veya hareket sensörlerine ne kadar güçlü kulak verdiğini pürüzsüz biçimde değiştirebiliyor.
Sürüş Senaryoları ve Zorlu Koşullar
Bunun pratikte nasıl çalıştığını göstermek için ekip, MoS2 cihazları ve standart analog bileşenlerle donatılmış bir devre kartında tam üç aşamalı filtreyi uyguluyor. Otoyolda bir şerit değiştirme ile sollama manevrası sırasında LiDAR, radar ve hareket sensörlerinin göreceği türden gerçekçi, gürültülü sinyaller besliyorlar. Sinyaller her aşamadan akarken çıktılar temizleniyor ve ani frenleme gibi güvenlik açısından önemli keskin değişiklikleri koruyarak konum, hız ve ivme için tutarlı tahminler sağlıyor. Sistem özellikle bir sensör güvenilmez hale geldiğinde veya bloklandığında etkileyici—örneğin bir kamyon geçici olarak LiDAR’dan diğer bir aracı sakladığında. Donanımda zarar görmüş sensörle ilişkili kazancı düşürerek analog filtre kalan girişlere ve önceki hareket örüntülerine otomatik olarak daha fazla dayanıyor, böylece hız ve ivme tahminlerini pürüzsüz ve fiziksel olarak makul tutuyor.
Makineler için Daha Hızlı, Daha Zarif Beyinler
Aynı filtreleme görevini yapan standart bir dijital uygulamayla karşılaştırıldığında, analog memtransistör tabanlı sistem yaklaşık 13 kat daha az enerji kullanıyor ve hesaplamalarını yaklaşık 59 kat daha hızlı tamamlıyor; hem de üç temel hareket değişkenini aynı anda ele alıyor. Cihazlar kompakt, kararlı ve büyük ölçekli üretime uyumlu olduğundan, bu yaklaşım kameralara ve radarlara yakın olarak yerleştirilebilecek gelecekteki "sensör içi" veya "sensöre yakın" işlem bloklarına işaret ediyor—otomobillerde, dronlarda ve diğer bağlantılı makinelerde. Uzman olmayanlar için çıkarım şu: gelişmiş malzemelerin fiziğine matematiğin bir kısmını yaptırarak mühendisler, görüşün mükemmel olmadığı durumlarda bile otonom sistemlerin güvenilir biçimde gezinmesine yardımcı olan daha akıllı, daha hızlı ve daha verimli elektronik "beyinler" inşa edebilirler.
Atıf: Tan, T., Guo, H., Wang, S. et al. Multi-stage Kalman filtering system for sensor fusion integrated with MoS2 memtransistor featuring 1024 conductance levels. npj 2D Mater Appl 10, 31 (2026). https://doi.org/10.1038/s41699-026-00672-7
Anahtar kelimeler: özerk sürüş, sensör füzyonu, Kalman filtresi, memtransistör, analog hesaplama