Clear Sky Science · tr
2-DOF robotik aygıt kullanarak donanımdan bağımsız kısmi yerçekimi simülasyonu kontrolü
Dünya’da daha hafif yerçekiminin önemi
İnsanlar Ay’a ve Mars’a daha uzun yolculuklar planladıkça, değişen yerçekimi düzeylerinin vücut üzerinde nasıl etkiler yaratacağını acilen bilmemiz gerekiyor. Bu tür testleri uzayda yapmak pahalı ve nadir olduğundan, bilim insanları hücreler ve küçük dokular için Dünya’da düşük yerçekimini taklit etmek amacıyla klinostat adı verilen özel dönen makineler kullanıyor. Bu makale, böyle bir cihazı sadece ağırlıksızlığı değil, aynı zamanda Ay ve Mars’ın daha zayıf çekimlerini ve hatta Dünya’ya yakın yerçekimi seviyelerini de güvenilir biçimde taklit edebilecek şekilde, belirli bir motora veya donanım parçasına sıkı sıkıya bağlı kalmadan kontrol etmenin yeni bir yolunu sunuyor.
Sahte yerçekimiye doğru döndürmek
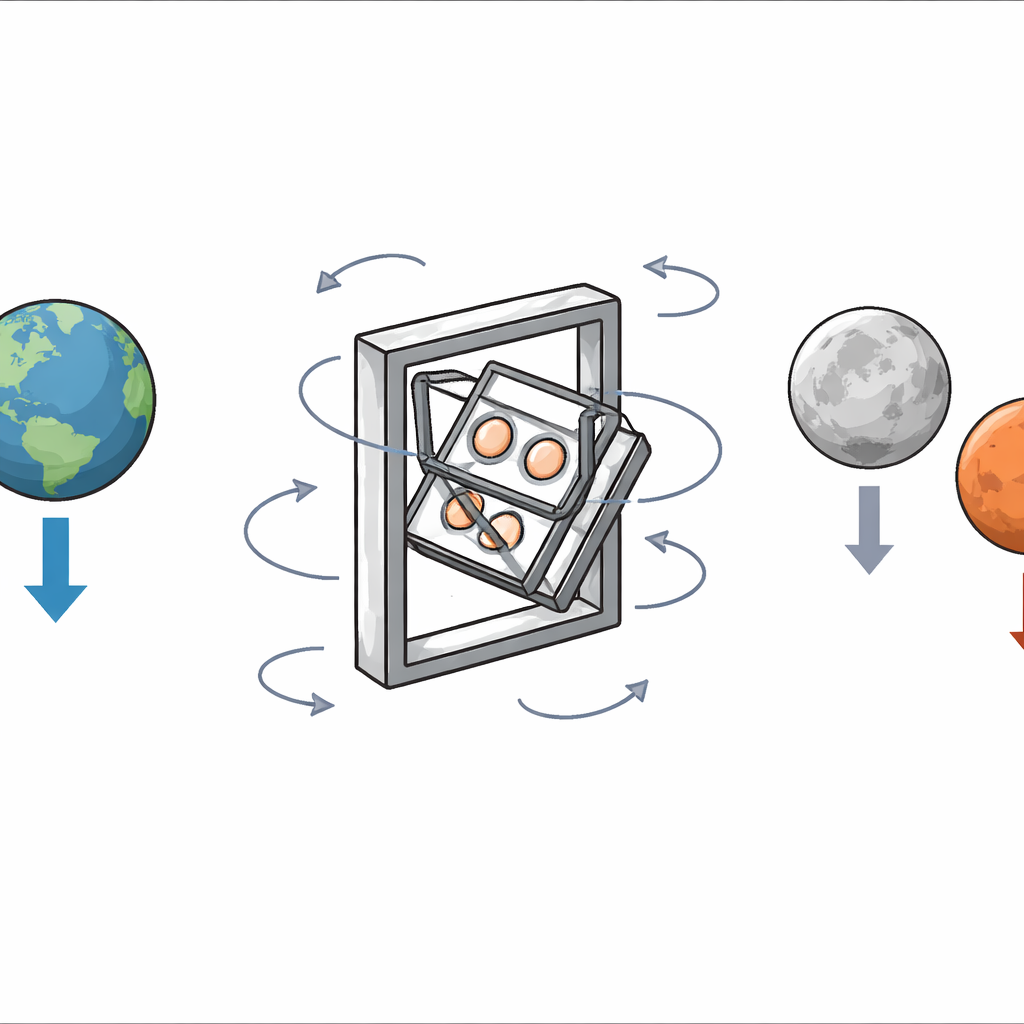
Dünya yüzeyine yakın yerde yerçekimi hemen her yerde neredeyse dik aşağıya işaret eder. Üç boyutlu bir klinostat, bir örneği —örneğin bir kap içindeki hücreler veya organoidler— alır ve onu birbirine dik iki eksen etrafında yavaşça döndürür. Örnek sürekli farklı yönlere bakacak şekilde yönlendirildiği için hücrelerin “gördüğü” yerçekimi yönü sürekli değişir ve zaman içinde bu çekimler ortalanır. Rotasyonlar doğru şekilde düzenlendiğinde, zamanla ortalanmış yerçekimi sıfıra yaklaşabilir ve yörüngedeki mikrogravitenin taklidi yapılabilir. Uzun yıllardır bu basit fikir, kas kaybı, kemik zayıflaması, bağışıklık değişimleri ve yerde kalarak incelenebilen diğer uzaya benzer etkileri araştırmak için kullanıldı.
Ağırlıksızlıktan “Ay‑benzeri” yerçekimine
Daha yakın zamanda, araştırmacılar yalnızca ağırlıksızlığı incelemenin yeterli olmadığını fark etti. Ay’da veya Mars’ta görev yapan astronotlar yerçekiminin yokluğuyla değil, daha zayıf olmasıyla yaşayacaklar. Bu farkı kapatmak üzere, zaman‑ortalama ile simüle edilmiş kısmi yerçekimi kavramı tanıtıldı: ortalamayı tamamen yok etmek yerine, cihaz yerçekiminin bir yönde diğerlerinden biraz daha sık işaret etmesini sağlar. Bu önyargı sıfır ile tam Dünya yerçekimi arasında bir ortalama çekim yaratır ve böylece Ay’daki 0.17 g veya Mars’taki 0.38 g gibi koşullar taklit edilebilir. Önceki kontrol yöntemleri bunu yapabiliyordu, ancak kullanılan motorlar ve mekanik detaylara çok bağımlıydılar ve yaklaşık 0.44 g civarından daha yüksek kısmi yerçekimi üretemiyorlardı.
Spinner’ı yönlendirmenin yeni yolu
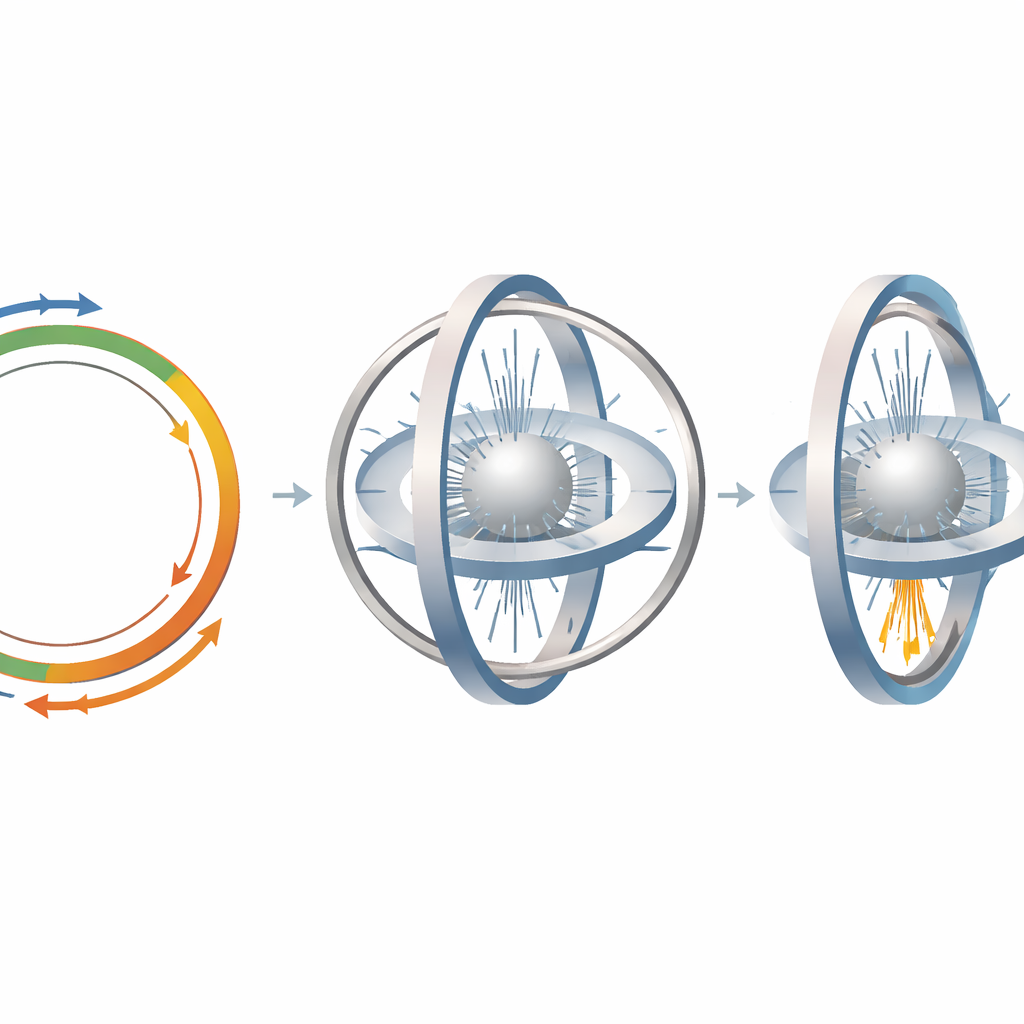
Bu çalışmanın temel yeniliği, klinostatın dış motorunu zamanı temel alarak değil, açısına bağlı şekilde kontrol etmektir. Önceki yöntemler motorun her an ne kadar hızlı döneceğini tarif ediyordu, ama gerçek donanım bu planı mükemmel şekilde takip etmez: küçük gecikmeler ve motor sınırları açı sapmasına yol açar ve bu hatalar birikir; bu da araştırmacıları her cihaza özel ek geri besleme döngüleri eklemeye zorlar. Burada yazarlar kontrol kuralını yeniden tasarlayarak açısal hızı doğrudan mevcut açıya bağlı bir fonksiyon olarak veriyorlar. Bu görünüşte küçük değişiklik hata artışını büyük ölçüde azaltıyor ve yöntemi motor gücü ile ataletten büyük ölçüde bağımsız hale getiriyor. Aynı zamanda iç motor, yerçekiminin hep aynı yolu izlememesi için rastgeleimsi bir desenle sürülüyor; bu da deney güvenilirliğini artırıyor.
Yerçekimini daha yakına itmek
Bilgisayar simülasyonları kullanarak ekip, α adı verilen ana bir kontrol parametresinin nihai ortalanmış yerçekimi üzerindeki etkisini haritaladı. α’yı artırarak simüle edilmiş kısmi yerçekimini yaklaşık 0.68 g’ye kadar yükseltebildiler—bu, eski 0.44 g sınırından çok daha yüksek. Daha da ilerlemek için “dinlenme zamanı” hilesini tanıttılar: dış çerçeve, yerçekiminin istenen ortalama çekimle hizalandığı açıya ulaştığında motor kısa süre duruyor. Bu duraklama sırasında örnek o yönde sabit bir çekim hissediyor ve önyargı güçleniyor. Simülasyonlar, daha uzun duraklamaların etkin yerçekimini Dünya’nın 1 g’sine daha da yaklaştırdığını gösterdi; deneyler de en doğru aralıkta tahmin edilen sonuçlardan yaklaşık %1 farkla yaklaşık 0.81 g’ye kadar değerleri doğruladı.
Ay’ı, Mars’ı ve ötesini test etmek
Araştırmacılar ticari servo motorlarla sürülen iki eksenli bir klinostat inşa etti ve merkezde monte edilmiş bir atalet sensörü ile yerçekimi yönünü izledi. Çeşitli α değerleri ve dinlenme süreleri test ettiler; ortalama yerçekiminin ne kadar çabuk yerleştiğini ve deneylerin simülasyonlarla ne kadar iyi örtüştüğünü ölçtüler. 0.33–0.63 g’ye karşılık gelen ılımlı α değerleri için uyumsuzluk tipik olarak %1 veya daha azdı. Ay‑benzeri ve Mars‑benzeri ayarlar için yapılan simülasyonlar ve deneyler sırasıyla yaklaşık 0.17 g ve 0.38 g yakınlarında ortalama çekimler üretti; aynı zamanda koşular arasında değişen yerçekimi yollarını korudular. Yazarlar ayrıca motor çözünürlüğü ve tepki gecikmeleriyle belirlenen pratik sınırları incelediler ve diğer laboratuvarların hassas kısmi yerçekimi seviyelerini tekrarlayabilmesi için aktuatör seçimi ve emniyet payları konusunda basit yönergeler sundular.
Geleceğin uzay sağlığı için anlamı
Sade bir dille, bu çalışma karmaşık ve donanıma duyarlı bir dönen düzeni daha tak‑çalıştır kısmi‑yerçekimi simülatörüne dönüştürüyor. Motor hızını açıya bağlayarak ve kontrollü duraklamalar ekleyerek yöntem, sürekli el ile kontrol döngüsü ayarı gerektirmeden derin uzaydan Ay ve Mars’a ve Dünya’ya doğru geniş bir yerçekimi aralığını sadakatle taklit edebiliyor. Bu esneklik, birçok araştırma grubunun hücrelerin, dokuların ve organoidlerin belirli yerçekimi seviyelerine nasıl tepki verdiğini incelemesini kolaylaştırarak uzun süreli uzay görevleri için sağlık risklerini tahmin etmemize ve karşı önlemler tasarlamamıza yardımcı olacak.
Atıf: Kim, Y.J., Park, S. & Kim, S. Hardware-independent control for partial gravity simulation using a 2-DOF robotic device. Sci Rep 16, 9727 (2026). https://doi.org/10.1038/s41598-026-40665-6
Anahtar kelimeler: kısmi yerçekimi simülasyonu, klinostat, uzay biyolojisi, mikrogravite araştırması, robotik hareket kontrolü