Clear Sky Science · tr
Eğimli kenar mekansal frekans tepkisini keskinlik ölçütü olarak kullanarak trafik levhalarından kantitatif bulanıklık çekirdek tahmini
Bulanık araç kameraları neden önemli
Modern otomobiller yaya tespiti, trafik levhalarını okuma ve şeritte kalma gibi görevler için giderek daha fazla kameraya dayanıyor. Ancak insan gözü gibi, kamera görüşü de yaş, ısı, titreşim veya küçük montaj kaymalarıyla zamanla yavaşça kötüleşebilir. Bu makale, üreticilerin arızaları beklemek yerine zaman içinde kamera sağlığını izlemelerine olanak tanıyabilecek şekilde, günlük trafik levhalarına bakarak bir otomotiv kameranın ne kadar bulanıklaştığını “ölçmenin” yeni bir yolunu inceliyor.
Trafik levhalarını test hedeflerine dönüştürmek
Fabrikalarda birim sevk edilmeden önce kamera keskinliği özel test desenleri üzerinde kontrol edilir. Yolda ise böyle kontrollü bir hedef yok—sadece gerçek dünya vardır. Yazarlar bu dünyadaki yaygın ve tekrar edilebilir bir nesneyi kullanıyor: temiz, yüksek kontrastlı kenarlara sahip trafik levhaları. Laboratuvar testlerine benzer şekilde kameranın ince ayrıntıları ne kadar iyi koruduğunu söyleyen standart bir keskinlik ölçüsü olan mekansal frekans tepkisi (SFR) üzerine yoğunlaşıyorlar. Trafik levhalarındaki hafif eğimli (“slanted”) kenarları analiz ederek laboratuvar testlerine benzer şekilde SFR hesaplayabiliyorlar, ancak bunu doğrudan gerçek sürüş sahnelerinden yapıyorlar.

Bir lensin ışığı nasıl yaydığını yakalamak
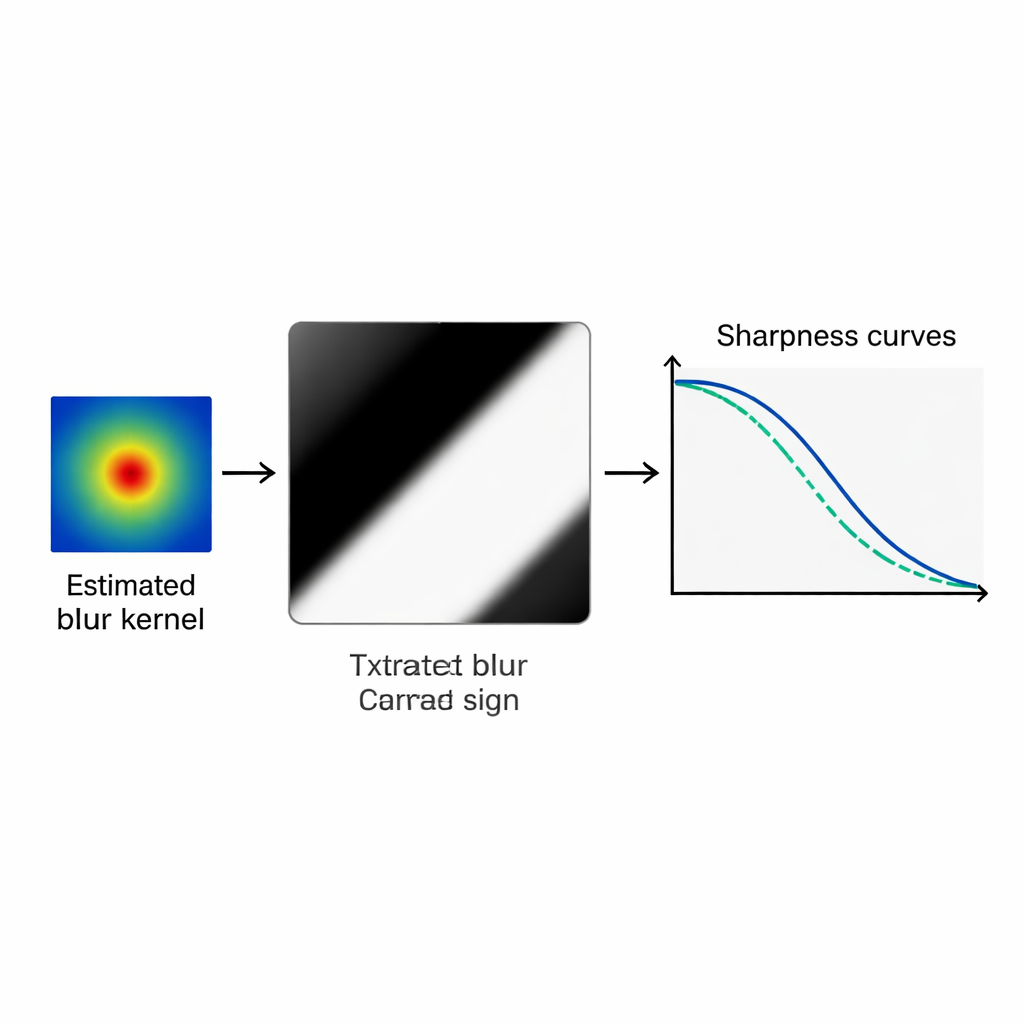
Kameradaki bulanıklık, bulanıklık çekirdeği veya nokta yayılım fonksiyonu (PSF) olarak adlandırılan küçük bir görüntüyle tanımlanabilir. Bu, sahnedeki tek bir noktadan gelen ışığın sensördeki komşu piksellere nasıl yayıldığını gösterir. Bulanık bir fotoğraftan bu çekirdeği doğrudan tahmin etmek genellikle çok zordur; çünkü birçok farklı keskin görüntü ve bulanıklık kombinasyonu benzer sonuçlar üretebilir. Bunu çözmek için araştırmacılar önce optik tasarım yazılımı kullanarak belirli bir otomotiv kamera için farklı odak ayarları ve görüntü konumlarında yaklaşık 1300 gerçekçi bulanıklık çekirdeği simüle ediyorlar. Ardından bu büyük koleksiyonu temel bileşen analizi (PCA) adlı istatistiksel bir araçla daha küçük bir ana desen setine sıkıştırıyorlar; böylece herhangi bir gerçekçi bulanıklık yüzlerce piksel değeri yerine yalnızca birkaç düzine sayı ile tanımlanabiliyor.
Piksel yerine keskinlik eğrilerini eşleştirmek
Kompakt bulanıklık “sözlüğü” oluşturulduktan sonra gerçek tahmin süreci, bulanık trafik levhası görüntüsünden kesilen iki küçük 45 × 45 piksellik yama ile aynı levhanın keskin referans görüntüsünden alınan eşleşen yamalarla başlar. PCA modelinden alınan aday bir bulanıklık çekirdeği için keskin yamalar yapay olarak bulanıklaştırılır ve bunların SFR eğrileri hesaplanır. Bu eğriler daha sonra gerçek bulanık yamalardan ölçülen SFR eğrileriyle karşılaştırılır. Diferansiyel evrim olarak bilinen küresel bir optimizasyon yöntemi, iki eğri seti arasındaki farkı en aza indirmek için çekirdek parametrelerini ayarlar. Etkili olarak algoritma, sentetik keskinlik eğrilerini gerçek kamera görüntüsünden ölçülenlerle olabildiğince iyi hizalayacak bulanıklık desenini arar.
Yöntem ne kadar iyi çalışıyor?
Yazarlar önce yöntemi gerçek bulanıklık çekirdeklerini kesin olarak bildikleri sentetik veriler üzerinde test ediyorlar. Çok keskin olandan belirgin şekilde odak dışı olana dek on farklı bulanıklık seviyesinde, tahmin edilen çekirdekler çeşitli bağımsız benzerlik ölçüleriyle yer gerçeğine (ground truth) yakın eşleşiyor; yapısal benzerlik değerleri tipik olarak 0.95’in üzerinde ve ortalama hatalar çok düşük. Ayrıca yakından örüntü kurtarmaya değil görüntüleri görsel olarak iyileştirmeye odaklanan son zamanların “gizli deblurlama” (blind deblurring) teknikleriyle karşılaştırıyorlar. Bu belirli kamera için temel çekirdeği doğru şekilde yeniden yapılandırma görevinde, yeni PCA tabanlı yöntem bu taban çizgilerini açıkça geride bırakıyor. Son olarak, sensörü bilinen odak dışılık yaratacak şekilde küçük adımlarla kaydırılabilen değiştirilmiş bir otomotiv kameradan alınan gerçek görüntülere algoritmayı uyguluyorlar. Burada gerçek çekirdekler mevcut olmasa da, tahmin edilen çekirdekler geniş bir odak ayarı aralığında sentetik kenarların keskinlik eğrilerinin ve görsel görünümünün gerçek bulanık kenarlara çok yakın kalmasını sağlıyor.
Laboratuvar tekniğinden kamera sağlık kontrolüne
Uzman olmayanlar için ana sonuç, yazarların artık sıradan trafik levhalarını bir arıza teşhis aracına dönüştürebilmesi—bir kameranın optiğinin zaman içinde nasıl değiştiğini, yalnızca görüntünün keskin veya yumuşak göründüğünü söylemenin ötesinde ortaya çıkarabilmesi. Tek bir geç/kalma sayısı yerine tahmin edilen bulanıklık çekirdeği, ışığın lens içinde nasıl yayıldığına dair ayrıntılı bilgileri kodluyor; bu da yeniden odak dışılık veya belirli optik kusurlarla ilişkilendirilebilir. Mevcut yöntem hesaplama açısından ağır ve yalnızca net kenarlar çevresindeki küçük yamalarda çalışsa da, ara sıra araçlardan sunucuya gönderilen görüntülerin kamera keskinliğinin yavaş bozulmasını izleyeceği gelecek sistemlere işaret ediyor. Bu, önleyici bakımın bilgilendirilmesine, gelişmiş sürücü destek sistemlerinin daha güvenli olmasına ve nihayetinde otonom araçların dijital “gözlerinin” yıllarca hizmette sağlıklı kalmasına yardımcı olabilir.
Atıf: Pandey, A., Akhtar, M.Z., Veettil, N.K. et al. Quantitative Kernel estimation from traffic signs using slanted edge spatial frequency response as a sharpness metric. Sci Rep 16, 7387 (2026). https://doi.org/10.1038/s41598-026-40556-w
Anahtar kelimeler: otomotiv kameraları, görüntü keskinliği, bulanıklık çekirdeği, trafik levhası görüntülemesi, kamera sağlık izleme