Clear Sky Science · tr
İç mekân yeniden konumlandırma ve yol planlama için olasılık yoğunluk fonksiyonları kullanan nesne farkındalıklı semantik haritalama
Daha akıllı iç mekân haritalarının önemi
Ev ve hizmet robotları laboratuvardan gerçek dairelere geçtikçe, sadece duvarlardan ve mobilyalardan kaçınmaktan fazlasını yapmaları gerekir. Gerçekten faydalı olabilmek için bir robot yatak gördüğünde bunun genellikle bir yatak odası anlamına geldiğini veya buzdolabının mutfağı işaret ettiğini anlamalıdır. Bu makale, robotların her odayı tanımlayan nesneler aracılığıyla iç mekânları “görmelerine” olanak veren yeni bir yöntem sunuyor; böylece nerede olduklarını belirleyip evlerin nasıl kullanıldığıyla daha uyumlu yollar seçebiliyorlar.
Günlük nesneler aracılığıyla odaları görmek
Geleneksel robot haritaları ya ham geometriye ya da soyut sembollere odaklanır. Lazer taramalardan oluşturulan ızgara haritalar ayrıntılı şekilleri yakalar, ancak depolanması ağırlaşır ve araması yavaşlar; robotları sert, ızgara benzeri yollara zorlayabilir. Odalar ve kapılardan oluşan yüksek düzeyli grafikler daha kolay işlenir, ancak hassas sürüş için gereken ince ayrıntıyı yok sayar. Yazarlar bu uçları, odaları ve içlerindeki ana statik nesneleri — yataklar, kanepeler, buzdolapları, masalar gibi — etrafında örgütleyerek birleştiriyor. Her oda düz bir kat planında sınırlandırılır ve her önemli nesne sınıfı kendi katmanına sahip olur, böylece farklı mobilya türleri birbirlerinin üzerine yazmaz.
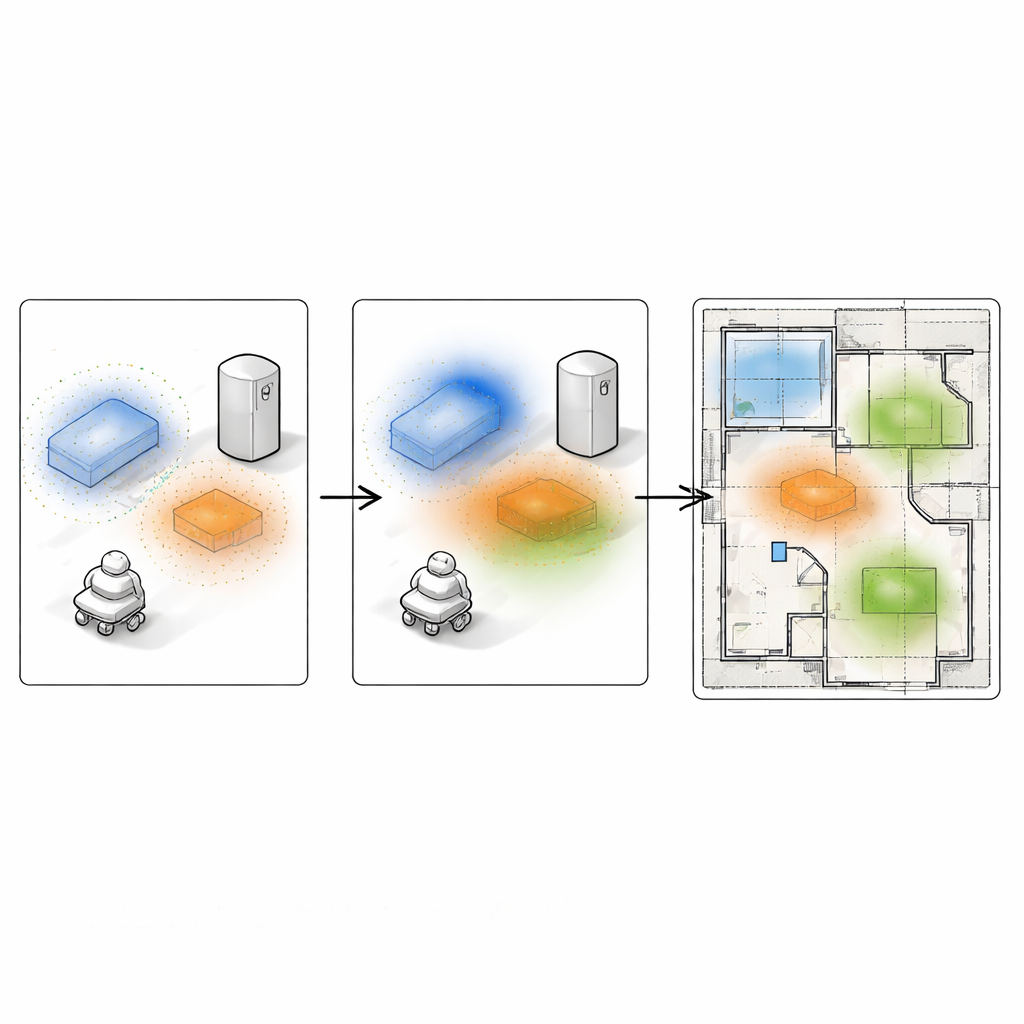
Mobilyayı yumuşak olasılık bulutlarına dönüştürmek
Her nesneyi sert kenarlı bir kutu olarak çizmek yerine yöntem, mobilyanın 3B taramalarını zeminde düzgün “ısı haritalarına” dönüştürüyor. Robot önce bir RGB‑D kamera ve standart araçlarla her odayı 3B olarak yeniden oluşturur, ardından duvarlar, yataklar veya sandalyeler gibi nesnelere ait noktaları semantik olarak etiketler. Bir odadaki her nesne türü için noktalar kümelenir ve zemine projekte edilir. Bu kümelerden sistem sürekli bir olasılık yoğunluğu tahmin eder — nesnenin en muhtemel olduğu yerde en yüksek ve dışarı doğru yumuşakça azalan bir yumuşak leke. Bu lekelerin nesne türüne göre üst üste istiflenmesi, hem nesnelerin anlamını hem de yaklaşık şeklini koruyan, gürültü ve kısmi görünümlerle doğal olarak başa çıkan kompakt, katmanlı bir harita üretir.
Robotların nerede olduklarını tekrar keşfetmelerine izin vermek
Bu nesne merkezli haritanın önemli bir kullanımı, robotun kat planında nerede olduğunu bilmediği durumlarda kendini yeniden konumlandırmasına yardımcı olmaktır — robotun ilk uyandığında veya taşındığında sık rastlanan bir sorun. Robot derinlik kamerasıyla yeni bir bakış alır, görüş alanındaki nesneleri algılar ve bu kısmi sahne için kendi küçük olasılık lekeleri kümesini oluşturur. Ardından, evrimsel bir arama algoritması bina genelinde birçok olası robot pozunu keşfeder. Her aday poz için yerel lekeler küresel haritaya üst üste bindirilir ve benzerlikleri istatistiksel bir mesafe kullanılarak ölçülür. Oda sınırları ve görüş hattı kontrolleri, bir duvarın içinden bir buzdolabı görmek gibi imkansız pozları eler. Birçok nesil boyunca aday poz nüfusu, gözlemlenen nesnelerin saklanan olasılık alanlarıyla en iyi eşleştiği konuma doğru evrilir ve robotun konumu ve yönelimi için sağlam bir tahmin sağlar.
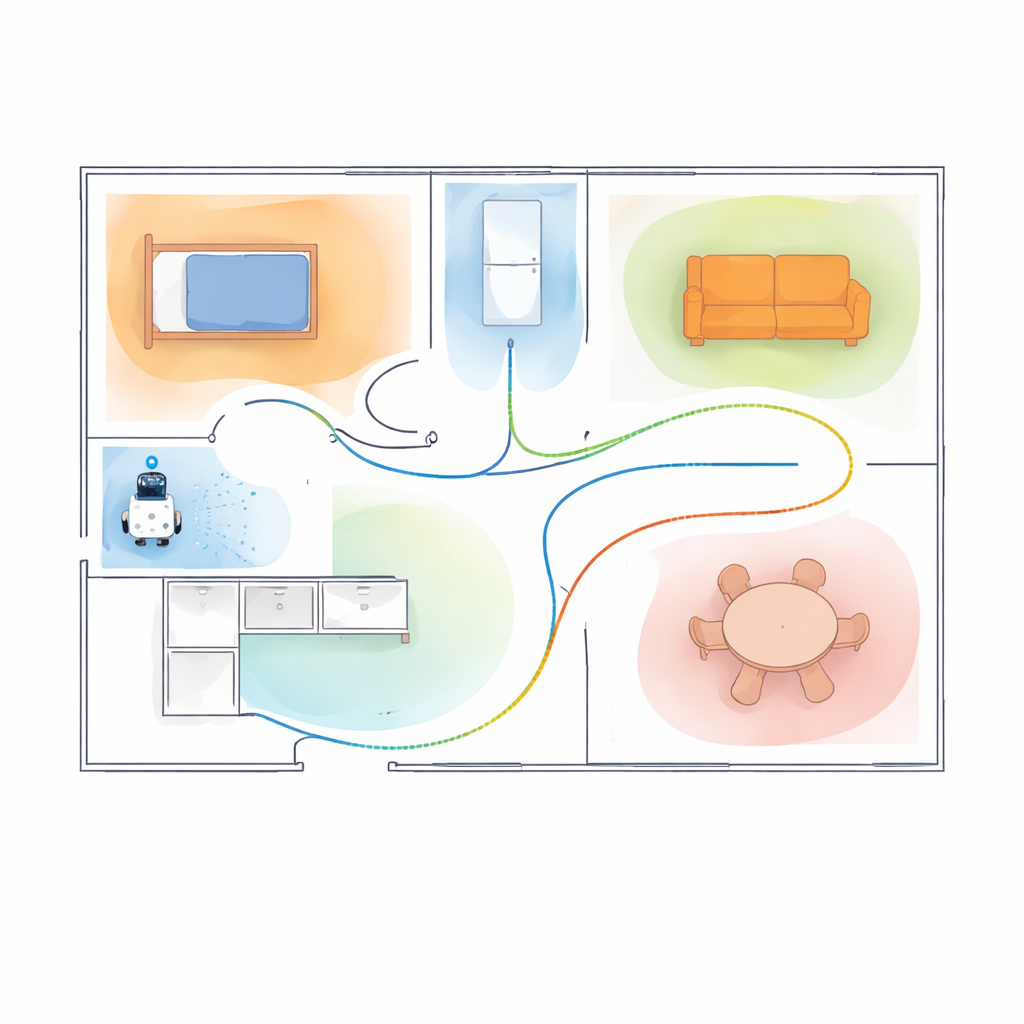
İnsanların mekân kullanımıyla uyumlu yollar planlamak
Aynı harita robotun nasıl hareket edeceğini de yönlendirir. Her nesne türü pürüzsüz bir etki alanı olarak temsil edildiği için robot, sayısal ağırlıkları ayarlayarak belirli alanları tercih etmesi veya kaçınması için yönlendirilebilir. Yataklar gece boyunca kaçınılması gereken bölgeler haline gelebilir, masalar ise eşyalar aranırken çekim merkezleri olabilir. Bu semantik tercihlerin her biri standart bir engel haritası ve duvarlar etrafında güvenlik marjıyla birleştirilerek kat planı üzerinde tek bir maliyet manzarası oluşturulur. Klasik bir yol planlayıcı, sadece çarpışmadan kaçınan değil aynı zamanda istenen sosyal veya görevle ilgili eğilimleri takip eden rotalar bulur. Gerçekçi bir veri setinde ve döşenmiş bir gerçekte yapılan deneyler, bu semantik önyargılı yolların bazen rota uzunluğunda küçük artışlar pahasına olmakla birlikte niyet edilen tercihleri daha iyi izlediğini ve gerçek evlerde daha pürüzsüz olabileceğini gösteriyor.
Günlük robotlar için ne anlama geliyor
Basitçe söylemek gerekirse, bu çalışma robotlara evleri insanların düşündüğü şekilde düşünmeyi öğretiyor: sadece duvarlı boş kutular olarak değil, mobilyaları tarafından tanımlanan odalar olarak. Her ana nesneyi yumuşak bir olasılık bulutu ile sarmalayarak tek bir kompakt harita hem “Neredeyim?” hem de “Oraya nasıl gideyim?” sorularını ayrı, görev-özgü modellere ihtiyaç duymadan destekleyebilir. Testler, bu yaklaşımın dağınık veya birbirine benzeyen odalarda robotların konumlandırılmasını daha güvenilir hale getirdiğini ve insanların beklentilerine daha uygun rotalar seçmelerine yardımcı olduğunu gösteriyor. Bu fikirler olgunlaştıkça, geleceğin ev robotları daha nazik ve akıllıca dolaşabilir; mekânlarımızda çok daha mekanik olmayan bir farkındalıkla hareket edebilirler.
Atıf: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
Anahtar kelimeler: iç mekan robot konumlandırma, semantik haritalama, nesne farkındalıklı gezinme, olasiliksel robotik haritalar, yol planlama