Clear Sky Science · tr
Belirsizlik farkındalıklı gezegen roverı navigasyonu için test‑zamanı uyarlamalı derin olasılıksal geçişbilirlik
Neden daha güvenli rover sürüşü önemli
Tekerlekli robotları Ay veya Mars’a gönderdiğimizde, insan yardımı olmadan kum, kayalar ve eğimler üzerinde sürmeleri gerekir. Zeminin ne kadar yumuşak olduğuna dair tek bir yanlış tahmin, NASA’nın Opportunity rover’ının dalgalı kumda haftalarca sıkıştığı örneğinde olduğu gibi, milyar dolarlık bir roverı sonsuza dek mahsur bırakabilir. Bu çalışma, roverların öndeki zeminin ne kadar riskli olduğunu “hissetmelerini”, daha güvenli rota tercihleri yapmalarını ve sürüş sırasında hatalarından öğrenmelerini sağlayan yeni bir yaklaşım sunuyor.
Yumuşak zemin: gizli bir tehlike
Diğer gezegenlerde en tehlikeli engeller her zaman kameraların kolayca görebildiği kayalar veya uçurumlar değildir; aldatıcı derecede düzgün görünen gevşek toprak örtüleri asıl tehdidi oluşturabilir. Rover tekerlekleri bu tür arazide dönünce araç kayar, komutlardaki hızın çok daha altında sürünür, enerji harcar ve kalıcı şekilde hareket edemez hale gelebilir. Geleneksel navigasyon sistemleri görünür geometrik tehlikelere—engel gibi görünen veya görünmeyen şeylere—odaklanır, ancak zeminin tekerlekler altındaki davranışını tam olarak yakalayamaz. Aynı zamanda, görüntüler ve 3B haritalardan tekerlek kaymasını tahmin etmeye çalışan makine öğrenimi yöntemleri, yeni aydınlatma veya daha dik eğimler gibi alışılmamış koşullarda hatalı olabilir ve genellikle tahminlerinin ne kadar belirsiz olduğunu belirtmezler.
Rovera risk hakkında muhakeme öğretmek
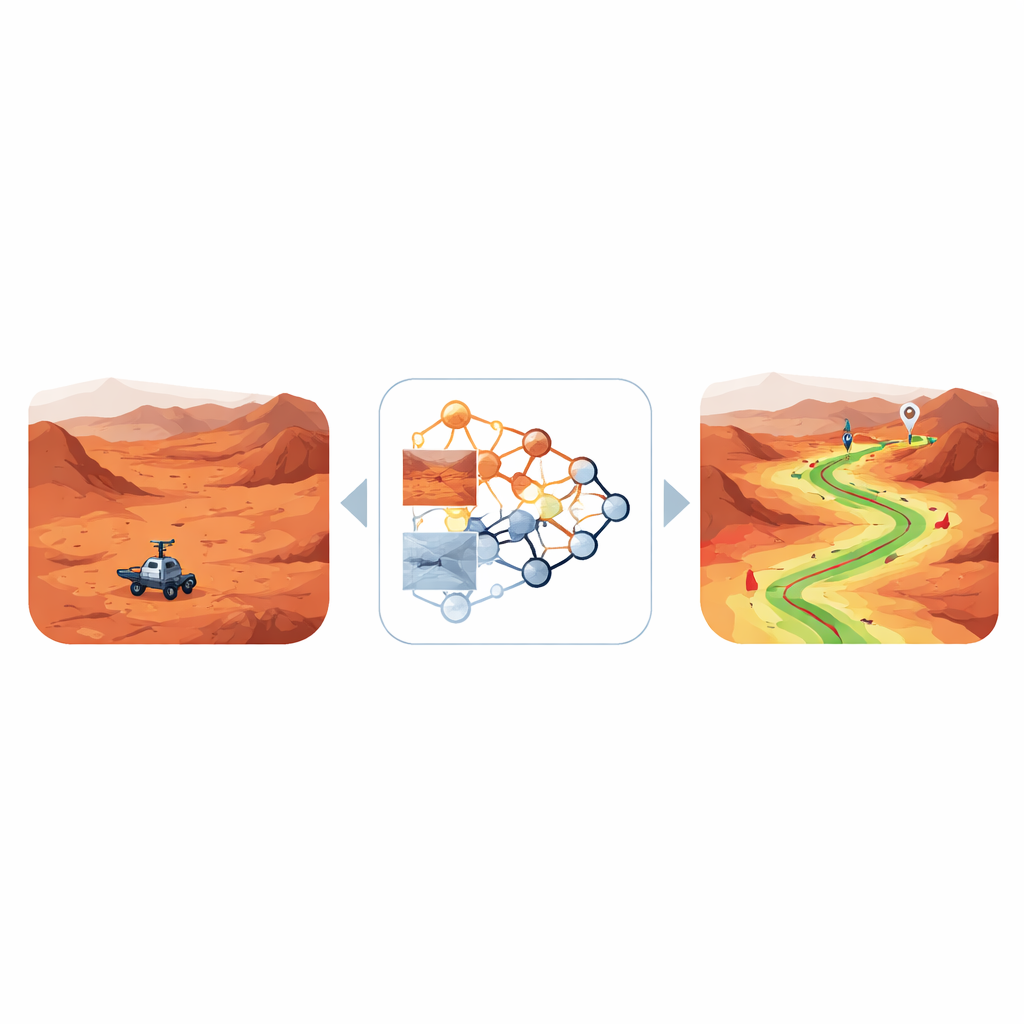
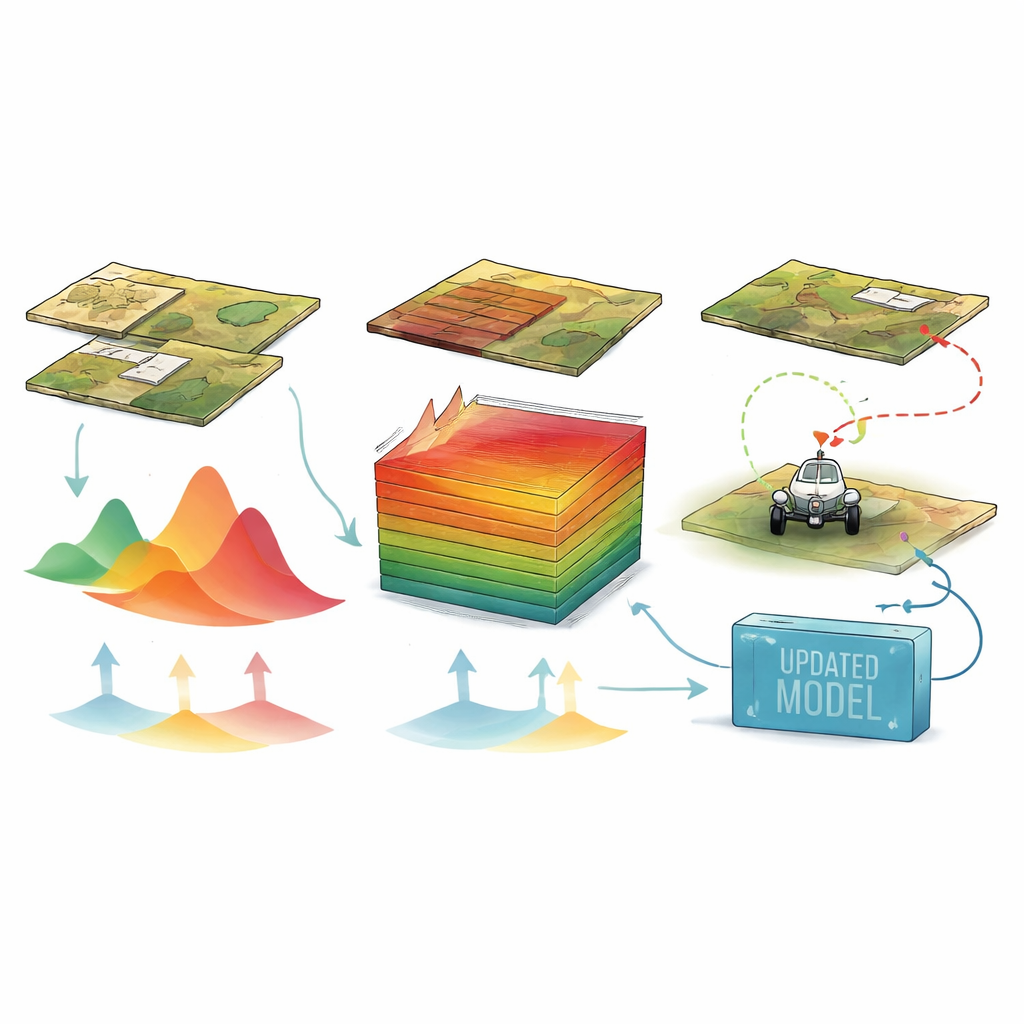
Yazarlar buna derin olasılıksal geçişbilirlik adını verdikleri entegre bir öğrenme ve planlama çerçevesi öneriyor. Her arazi parçasında tekerleklerin ne kadar kayacağına dair tek bir “en iyi tahmin” üretmek yerine modelleri, renkli görüntü ve yerel eğime dayanarak olası kaymaların tam bir olasılık dağılımını tahmin ediyor. Bir derin sinir ağı ansamblı, peyzaja yukarıdan bakıyor ve bir ızgaradaki her olası hareket için hem beklenen kayma değerini hem de bunun belirsizliğini çıkarıyor. Bu dağılımdan sistem kaymayı etkin bir sürüş hızına ve nihayetinde her adıma ilişkin bir seyahat zamanı maliyetine çeviriyor. Roverın saplanıp kalma olasılığının yüksek olduğu alanlara çok yüksek maliyetler veriliyor; tahminin hem elverişli hem de güvenilir olduğu alanlar düşük maliyet alıyor. Standart bir yol arama algoritması kısa mesafe ile immobilizasyon riskinin düşük olması arasında bir denge kuran bir rota buluyor.
Roverın giderken öğrenmesine izin vermek
Gezegen keşfindeki büyük zorluklardan biri, roverın varışta gördüğü koşulların eğitim verilerinden ciddi şekilde farklı olabilmesidir: eğimler daha dik olabilir, toprak özellikleri yabancı olabilir veya aydınlatma çok farklı olabilir. Buna uyum sağlamak için çerçeve test‑zamanı uyarlama mekanizması içeriyor. Rover sürerken gerçek kaymayı ölçüyor. Her kısa hareketten sonra bu taze ölçümler, orijinal ağırlıklar sabit tutularak sinir ağlarına eklenen “ölçek ve kaydırma” katmanlarını nazikçe ayarlamak için kullanılıyor. Bu strateji, modelin daha önce görülmüş koşullar hakkında öğrendiklerini korurken yalnızca birkaç gözlemle yeni arazilere hızla uyum sağlamasına imkan veriyor. Güncellenen tahminler yeniden planlamaya geri besleniyor, böylece seçilen yol anında iyileştirilebiliyor.
Sistemi zorlu testlerden geçirmek
Gerçek rover verileri yalnızca sınırlı arazi türlerini kapsadığından, ekip Mars benzeri büyük bir sentetik veri seti oluşturdu. Bilgisayar tarafından üretilmiş engebeli topografyayı, her birinin kendine özgü renk ve kayma davranışı olan on gizli arazi sınıfıyla birleştirdiler ve hem eğim dikliğini hem de aydınlatma yönünü değiştirerek tanıdık ve tanıdık olmayan senaryolar yarattılar. Binlerce benzetimli görevde yeni yöntem, belirsizliği görmezden gelen veya daha dolaylı kullanan iki çağdaş planlayıcıyla karşılaştırıldı. Tanıdık koşullarda tüm yaklaşımlar benzer performans gösterdi. Ancak en zorlu durumlarda—karanlık aydınlatma ve krater benzeri dik arazide—derin olasılıksal geçişbilirlik yaklaşımı daha yüksek başarı oranları ve daha düşük maksimum kayma elde etti ve rekabetçi seyahat sürelerini korudu. Anında uyarlama etkinleştirildiğinde sistem, özellikle eğitimden güçlü biçimde farklılaşan ortamlarda, tahmin hatalarını daha da azalttı ve güvenliği artırdı.
Gelecek görevler için anlamı
Genel okuyucu için temel mesaj, bu çalışmanın gezegen roverlarına tehlikeli zeminde daha temkinli ve öz‑farkındalıklı bir sürüş yolu sağladığıdır. Tekerleklerinin nasıl tutunacağına dair tek bir tahmine körü körüne güvenmek yerine, roverlar artık beklenen davranışı ve belirsizliği tartarak hızlı ama mahsur kalma olasılığı düşük rotalar seçebiliyor. Kendi kayma deneyimlerinden sürekli öğrenerek, insan kurtarmasına ihtiyaç duymadan yeni kumlara, eğimlere ve aydınlatma koşullarına uyum sağlayabiliyorlar. Uzay ajansları daha uzun ve daha iddialı yüzey görevleri planlarken, bu tür belirsizlik farkındalıklı navigasyon, değerli robotların yeni bilim hedeflerini keşfetmeye daha fazla, kendilerini sıkışıp çıkarmaya daha az zaman harcamalarını sağlamaya yardımcı olabilir.
Atıf: Endo, M., Taniai, T. & Ishigami, G. Deep probabilistic traversability with test-time adaptation for uncertainty-aware planetary rover navigation. Sci Rep 16, 9499 (2026). https://doi.org/10.1038/s41598-026-40109-1
Anahtar kelimeler: gezegen roverı navigasyonu, arazi geçişbilirliği, belirsizlik farkındalıklı planlama, makine öğrenimi robotik, özerk keşif