Clear Sky Science · tr
InFoRM: sensörimotor kontrol için birleşik ters ve ileri model
Beynin hareketi nasıl basitleştirebileceği
Bir bardağa uzandığınızda veya klavyede tuşa bastığınızda, beyniniz bir niyeti ("elimi oraya hareket ettir") hassas kas etkinliğine dönüştürmek ve aynı zamanda bu hareketin nasıl hissedileceğini öngörmek zorundadır. Klasik teoriler, beynin bu işi yapmak için iki ayrı içsel hesaplayıcı kullandığını varsayar: biri kaslara komut üretir, diğeri gelen duyumları tahmin eder. Bu çalışma cesur bir alternatifi araştırıyor: tek, birleşik bir devrenin problemin her iki tarafını da ele alabileceği—enerji tasarrufu sağlayıp performansı artırabileceği—özgün bir olasılık.
Kontrolü düşünmenin iki yolu
Geleneksel hareket kontrol modelleri bölünmüş bir sistemi hayal eder. "Ters" bir kısım, istenen bir sonucu (örneğin parmak ucunun uzaydaki yolu) gerekli kas etkinliklerine çevirirken, "ileri" bir kısım vücudun nasıl hareket edeceğini ve hangi duyusal geri bildirimlerin ortaya çıkacağını tahmin eder. Bu iki parça ders kitaplarında sıklıkla ayrı kutular olarak çizilir. Oysa beyin görüntüleme ve lezyon verileri böyle düzgün bir ayrımı açıkça desteklemez ve bazı beyin bölgeleri her iki rolle de ilişkili gibi görünür. Ayrıca iki karmaşık devreyi çalışır durumda tutmak metabolik olarak maliyetli olabilir. Bu nedenle yazarlar, tek bir esnek ağın motor komutları üretebileceğini, duyusal geri bildirimi tahmin edebileceğini ve hatta yalnızca içsel sinyallerden orijinal amacı çıkarabileceğini sorgular.
Hepsini yapan tek bir ağ
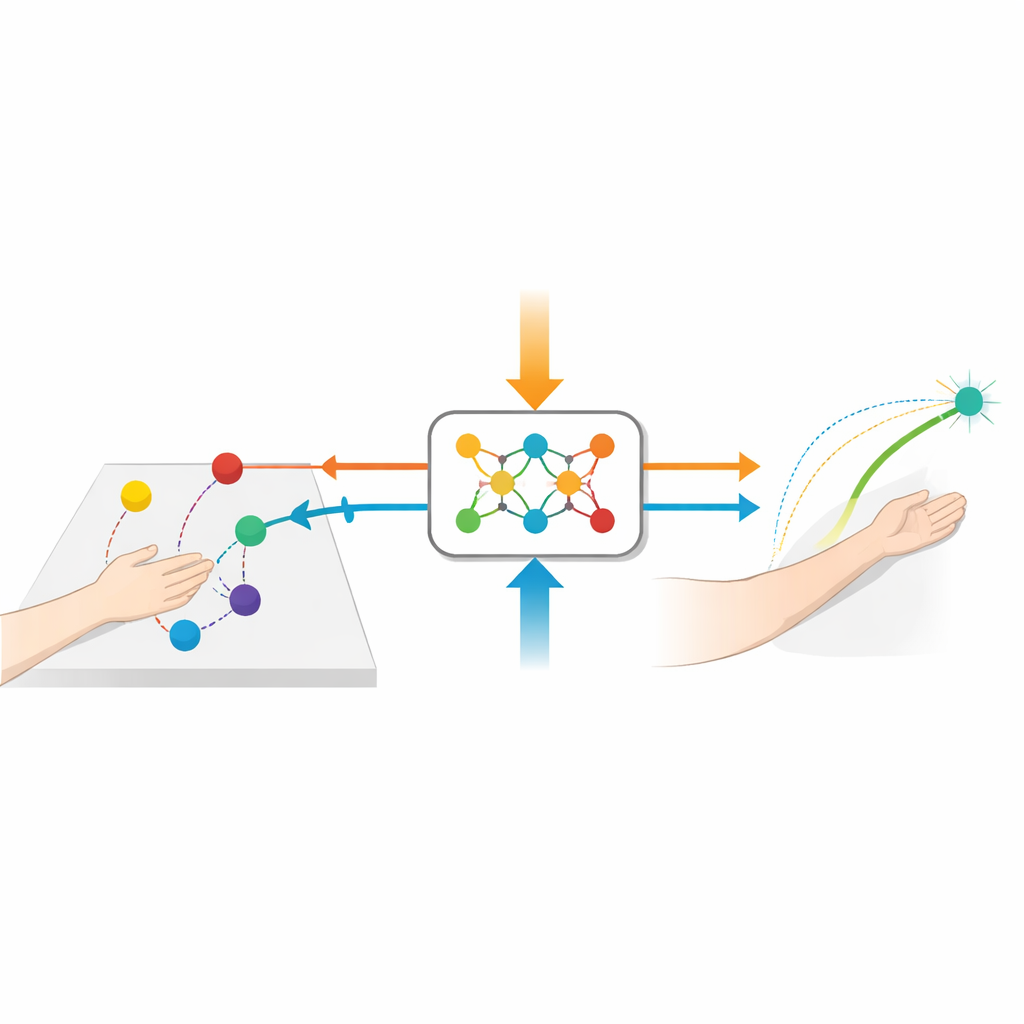
Bu fikri test etmek için araştırmacılar InFoRM adında (inverse–forward–recognition model kısaltması) hesaplamalı bir model kurdular. İki yığılı modül yerine InFoRM, amaç, kas ve duyusal sinyallerin hepsinin aktığı tek bir geri beslemeli sinir ağı—birbiriyle bağlantılı birimler ağı—kullanır. Bu ortak "rezervuar" etkinliğinden paralel olarak üç çıkış eğitilir: biri istenen el yolunu yeniden oluşturur, biri onu gerçekleştirmek için gerekli kas etkinliklerini üretir ve biri de izleyen duyusal sinyalleri (kas uzunluğu ve hız) tahmin eder. Kritik olarak, aynı iç dinamikler üç görevi aynı anda desteklediği için model her birini izole olarak öğrenmek yerine bunlar arasında bilgi paylaşabilir.
Modeli gerçek dünya testine koymak
Ekip, gönüllülerin ritmik olarak merkezden farklı yön ve mesafelerde yerleştirilmiş hedeflere uzandığı gerçek kol hareketlerini kaydetti. Hareket yakalama verileri ve ayrıntılı bir kas-iskelet modeli, her hareket için parmak ucu yolunu, tahmini kas etkinliklerini ve kaslardan gelen karşılık gelen duyusal-benzeri sinyalleri sağladı. InFoRM, yönlerin bir alt kümesi üzerinde eğitildi ve ardından birkaç zorlu senaryoda test edildi: öğrenilmiş hareketleri tekrarlama, yeni ara yönlerde hareket üretme (gördükleri arasında "morfing"), ve hedefler arasında doğal, öz-seçilmiş geçişleri idare etme. Karşılaştırma için yazarlar ayrıca ayrı ters ve ileri ağlara sahip daha klasik kontrol mimarileri ve ekstra girdi bilgisi verilen geliştirilmiş varyantlar da kurdular.

Daha az kaynakla daha keskin tahminler
Tüm testlerde birleşik InFoRM ağı kaydedilmiş hareketleri ve kas sinyallerini ayrılmış mimarilerden herhangi birinden daha doğru şekilde yeniden üretti. Çıkışları gerçek sinyalleri daha yakından izledi ve eğitilmemiş yönlere enterpolasyon yapması veya gerçekçi, senaryosuz hedef dizileriyle başa çıkması istendiğinde bile daha küçük hatalar gösterdi. Önemli olarak, InFoRM benzer veya daha az nöron kullanırken ve çok daha az eğitim yinelemesine ihtiyaç duyarken bu daha yüksek doğruluğa ulaştı; bu da daha iyi hesaplama verimliliğine işaret ediyor. Ayrıca en iyi zenginleştirilmiş kontrol modelini—aynı kombinasyonda amaç, motor ve duyusal bilgiye erişimi olan—dahi geride bırakması, avantajın yalnızca daha zengin girdilerden değil, her şeyi tek bir geri beslemeli devrede bütünleştirmekten kaynaklandığını düşündürüyor.
Beyni anlamak açısından bunun anlamı
Bu bulgular, beynin hareket için keskin biçimde ayrılmış "ileri" ve "ters" motorlardan oluşan bir sistemi sürdürmeyebileceği fikrini destekliyor. Bunun yerine tek, zengin bağlantılı bir devre her ikisini de örtük olarak içerebilir; motor komutlar ve tahminler aynı temel dinamiklerden ortaya çıkar. Bu bakış açısı, beyni sürekli olarak kendi bedeni ve dünya hakkında beklentiler üreten ve güncelleyen öngörücü bir makine olarak gören modern görüşlerle iyi örtüşüyor. Model hâlâ basitleştirilmiş bir soyutlama ve sinir gecikmeleri ile değişen sinapslar gibi biyolojik ayrıntıların araştırılması gerekiyor olsa da, InFoRM birleşik bir tasarımın hem güçlü hem ekonomik olabileceğini gösteriyor ve sinir sistemimizin hareketi nasıl kontrol ediyor olabileceğine dair çekici bir alternatif plan sunuyor.
Atıf: de Graaf, M.L., Kloock, L., Schwarze, A. et al. InFoRM: a unified inverse and forward model for sensorimotor control. Sci Rep 16, 8490 (2026). https://doi.org/10.1038/s41598-026-39944-z
Anahtar kelimeler: sensörimotor kontrol, içsel modeller, sinir ağları, motor öğrenme, öngörücü işlemleme