Clear Sky Science · tr
Aydınlanma değişiklikleri altında sağlam yer tanıma: omnidireksiyonel görüntülerden sahte-LiDAR
Karanlıkta Hiç Kaybolmayan Robotlar
Bir robotun, içinde bulunduğu binada öğle vaktinde pencerelerden güneş ışığı süzülürken ya da gece geç saatlerde yalnızca birkaç lamba yanarken nerede olduğunu tanıyabildiğini hayal edin. Bu makale, yalnızca tek bir, nispeten ucuz kamera kullanarak robotlara bu tür güvenilir bir yer algısı kazandırmanın yeni bir yolunu sunuyor. Düz görüntüleri 3B bilgiye dönüştürerek araştırmacılar, gölgeler, parlamalar ve genellikle görsel tabanlı sistemleri şaşırtan diğer zor aydınlatma değişikliklerine karşı robot navigasyonunu çok daha az hassas hale getiriyor.
Aynı Yeri İki Kez Bulmanın Neden Zor Olduğu
Bir robot için “yer tanıma”, “Burada daha önce bulunmuştum” demek ve böylece kendini bir harita üzerinde konumlandırıp güvenli şekilde gezinmesini sağlamak anlamına gelir. Geleneksel sistemler ya sıradan kameralara ya da LiDAR olarak bilinen lazer tabanlı mesafe sensörlerine dayanır. Kameralar ucuzdur ve zengin renk ile doku bilgisi yakalar, ancak bulutlu, güneşli ve gece sahneleri arasında görünümleri dramatik şekilde değişir. LiDAR, mesafeyi doğrudan ölçtüğü için çok daha kararlıdır, ancak hacimli ve pahalıdır. Bazı robotlar birkaç sensörü birleştirir, fakat bu sistemin maliyetini ve karmaşıklığını artırır. Bu çalışmanın yazarları farklı bir yol izliyor: donanımı basit tutup sadece robot etrafını gören tek bir omnidireksiyonel kamera kullanıyor ve yazılımı, robotun ham görüntü görünümü yerine 3B yapıyı düşünmesi için geliştiriyorlar.
Çevresel Fotoğraflardan 3B Şekillere
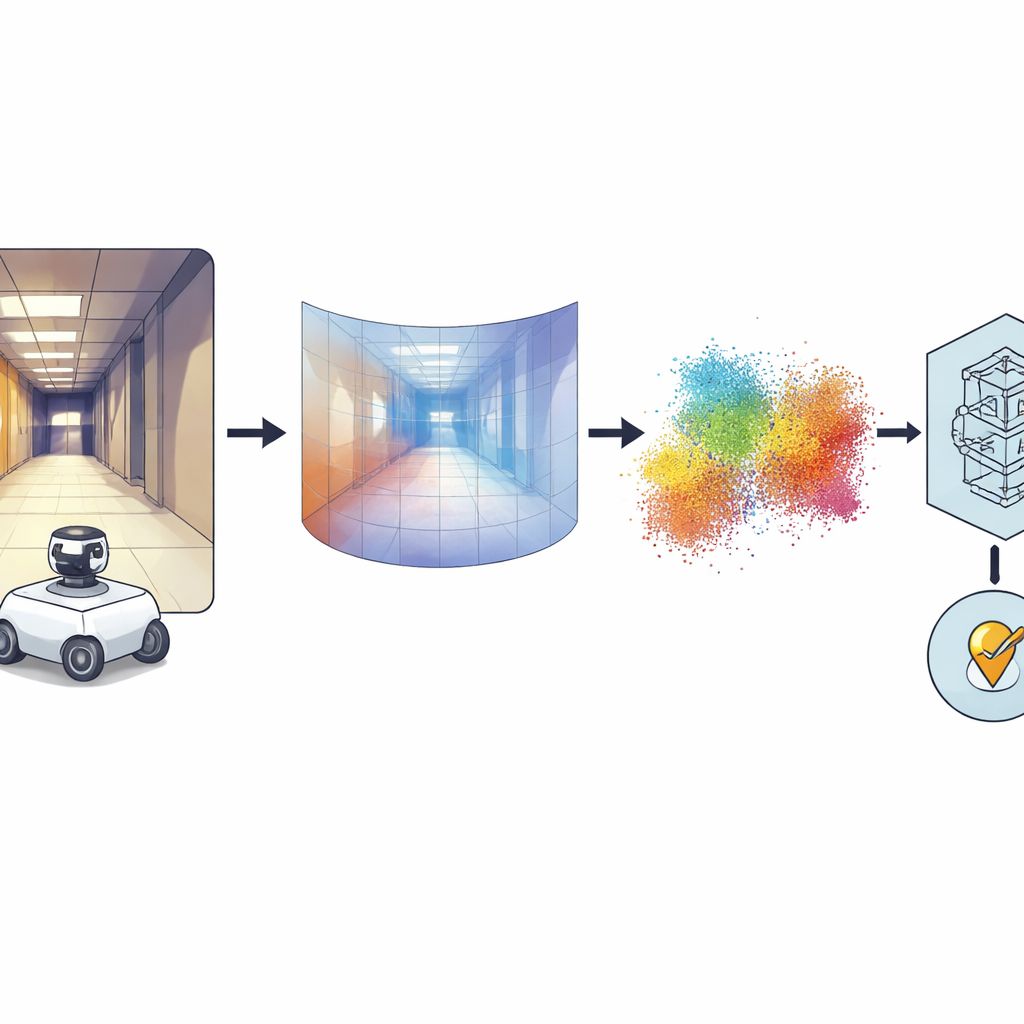
Ana fikir, her panoramik görüntüyü sahnenin kameraya olan uzaklığını kodlayan yoğun bir derinlik görseline dönüştürmektir; her piksel sahnenin o kısmının kameradan ne kadar uzakta olduğunu ifade eder. Bunu yapmak için yazarlar, devasa görüntü koleksiyonlarından derinlik çıkarmayı öğrenmiş güçlü bir “foundation” (temel) model olan Distill Any Depth’e dayanıyor. Ortaya çıkan derinlik haritası daha sonra gerçek bir lazer tarayıcıya ihtiyaç duymadan bir 3B nokta bulutuna—bir tür sanal LiDAR ya da pseudo-LiDAR—dönüştürülür. Ek işlem, 360 derece kamera için kullanılan özel aynanın neden olduğu artefaktları temizleyerek eksik veya örtülmüş bölgeleri doldurur. Son olarak, 3B nokta bulutları üzerinde doğrudan çalışmak üzere tasarlanmış MinkUNeXt adlı bir sinir ağı, her bulutu yerin genel düzenini yakalayan kompakt bir parmak izine (fingerprint) sıkıştırır.
Sistemi Aydınlatma Hilelerini Görmezden Gelmeye Öğretmek
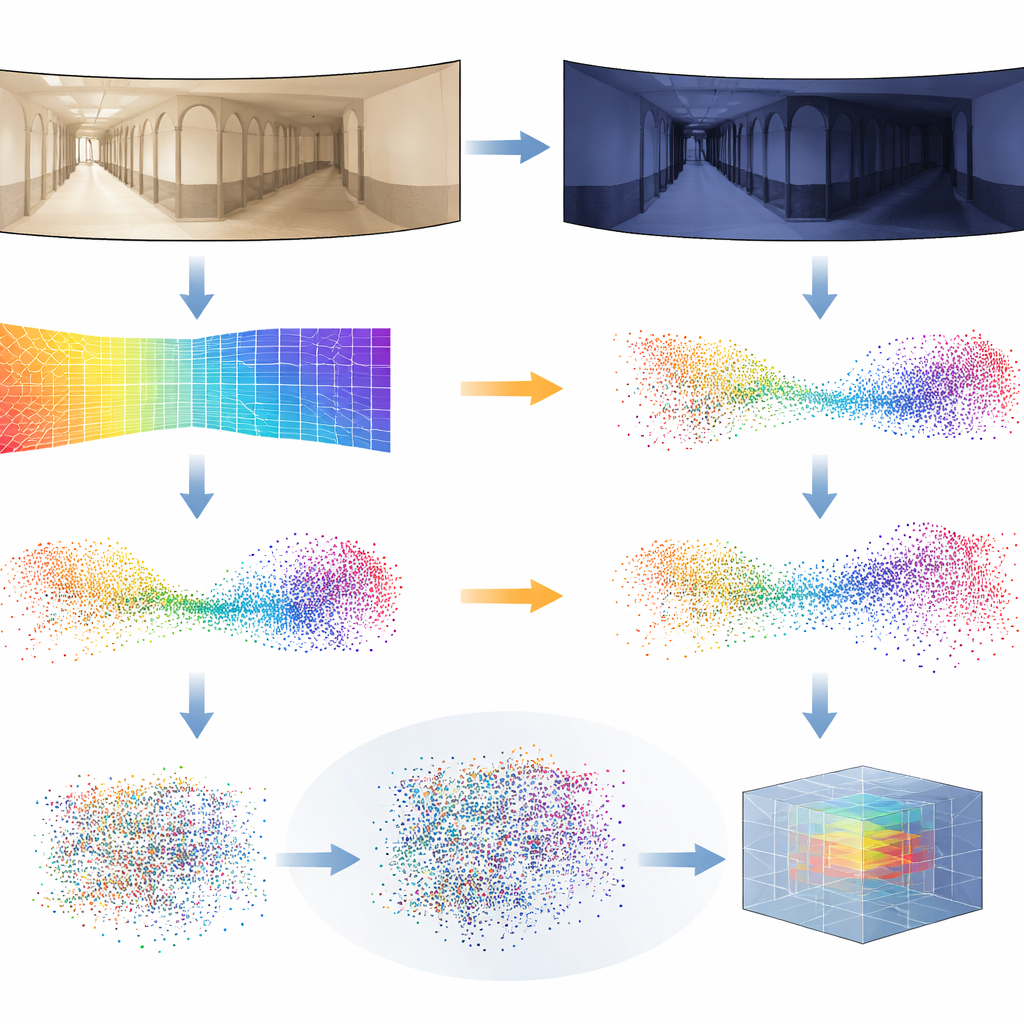
Derinlik tahminleri mükemmel değildir, özellikle de aydınlatma bir andan diğerine dramatik şekilde değiştiğinde. Sistemi sağlam hale getirmek için araştırmacılar Distilled Depth Variations adını verdikleri yeni bir eğitim hilesi tanıtıyor. Tek bir derinlik modeline güvenmek yerine, amaçlı olarak daha küçük ve daha az doğru derinlik kestirimlerini bir araya karıştırıyorlar. Bu kontrollü “gürültü”, farklı aydınlatma koşullarında görülen bozulmaları taklit ederek 3B ağın bir yerin geometrisi hakkında gerçekten önemli olanı ile güvenle göz ardı edilebilecek olanı öğrenmesini zorunlu kılıyor. Ayrıca her 3B noktayı görüntü kenarları ve doku gücü hakkında bilgilerle zenginleştiriyorlar—bunlar ham renkten daha stabil olma eğiliminde olan özelliklerdir.
Bunun Gerçek Dünyada İşlediğini Kanıtlamak
Yaklaşımlarını test etmek için ekip, iç mekan robot yolculuklarının zorlu kamu veri setlerine başvurdu. Bu koleksiyonlarda bir robot koridorlarda ve odalarda bulutlu gündüz, parlak güneş ışığı ve gece olmak üzere birden çok kez dolaşır; mobilya ve insanlar hareket eder. Yazarlar sistemlerini sadece bir binadan alınmış bulutlu görüntülerle eğitip ardından tüm bina ve aydınlatma koşullarında, daha önce görmediği sahneler dahil olmak üzere değerlendirdiler. Pseudo-LiDAR yöntemleri, özellikle gece çalışmaları veya tamamen yeni ortamlara transfer gibi en zorlu durumlarda, önde gelen 2B görüntü tabanlı tekniklerle ve diğer 3B sistemlerle karşılaştırıldığında tutarlı biçimde eşleşti veya daha iyi performans gösterdi. Ayrıca aynı boru hattının uygun derinlikten 3B projeksiyona geçişle normal öne bakan kameralarla da çalıştığını gösterdiler; yalnızca panoramik olanlarla sınırlı değil.
Geleceğin Robotları İçin Anlamı
Günlük ifadeyle, bu çalışma bir robotun yalnızca tek bir kamera ve akıllı yazılım kullanarak LiDAR benzeri çevre farkındalığı kazanabileceğini gösteriyor. Değişken aydınlatma ve rengin kırılgan ayrıntıları yerine 3B yapıya odaklanarak sistem, donanımı basit ve uygun maliyetli tutarken gün, gece ve hava değişiklikleri boyunca yerleri güvenilir şekilde tanıyabiliyor. Bu, hizmet robotları, depo araçları ve yardımcı cihazlar için sağlam iç mekan navigasyonunu daha erişilebilir hale getirebilir ve daha güvenilir otonomi için derinliği daha yüksek seviyeli sahne anlayışıyla harmanlayan gelecek sistemlerin önünü açar.
Atıf: Cabrera, J.J., Alfaro, M., Gil, A. et al. Robust place recognition under illumination changes using pseudo-LiDAR from omnidirectional images. Sci Rep 16, 8817 (2026). https://doi.org/10.1038/s41598-026-39848-y
Anahtar kelimeler: robot konumlandırma, 3B görme, yer tanıma, derinlik tahmini, omnidireksiyonel kameralar