Clear Sky Science · tr
ACFM: İHA trafiğinde küçük nesne tespit performansını artırmak için uyarlanabilir kanal ağırlıklı füzyon algoritması
Gökten Daha Fazlasını Görmek
İHA’lar trafik, kalabalık güvenliği ve afet bölgelerini giderek daha fazla izledikçe basit ama inatçı bir sorunla karşılaşıyorlar: yükseklikten bakıldığında önemli olan nesneler—otomobiller, otobüsler, hatta insanlar—çoğu zaman sadece birkaç pikselle temsil ediliyor. Bu küçük lekeler, gölgeler, tabela karmaşası ve hareket bulanıklığıyla dolu kalabalık şehir sokaklarında algoritmaların gözünden kaçmaya çok uygun. Bu makale, tespit hızını yavaşlatmadan İHA görüntülerindeki bu kadar küçük nesneleri bilgisayarların daha net “görmesine” yardımcı olacak yeni bir yaklaşım sunuyor.
Neden Küçük Noktalar Önemli
İHA kameraları yüksek irtifalardan geniş sahneler yakalar; bu yüzden tek bir karede otoyollar, binalar, ağaçlar ve düzinelerce araç bulunabilir. Bu araçların çoğu çok küçük görünür ve birbirlerinin önüne geçebilir veya gizlenebilir. Geleneksel derin öğrenme tespitçileri büyük, net nesneleri bulmada mükemmeldir, ancak bilginin ağın daha derin katmanlarına akışı sırasında ince ayrıntıları kaybetmeye meyillidir. Sonuç olarak küçük araçlar, özellikle kalabalık kavşaklarda, düşük ışıkta veya biraz bulanık çekimlerde arka plana karışır. Mevcut çok ölçekli yöntemler farklı ağ katmanlarından gelen bilgiyi birleştirerek bir dereceye kadar yardımcı olur, ancak genellikle sabit, önceden belirlenmiş kurallara dayanır ve sahne özellikle karmaşık veya yoğun olduğunda uyum sağlamakta zorlanır.
İpuçlarını Daha Akıllıca Birleştirmek
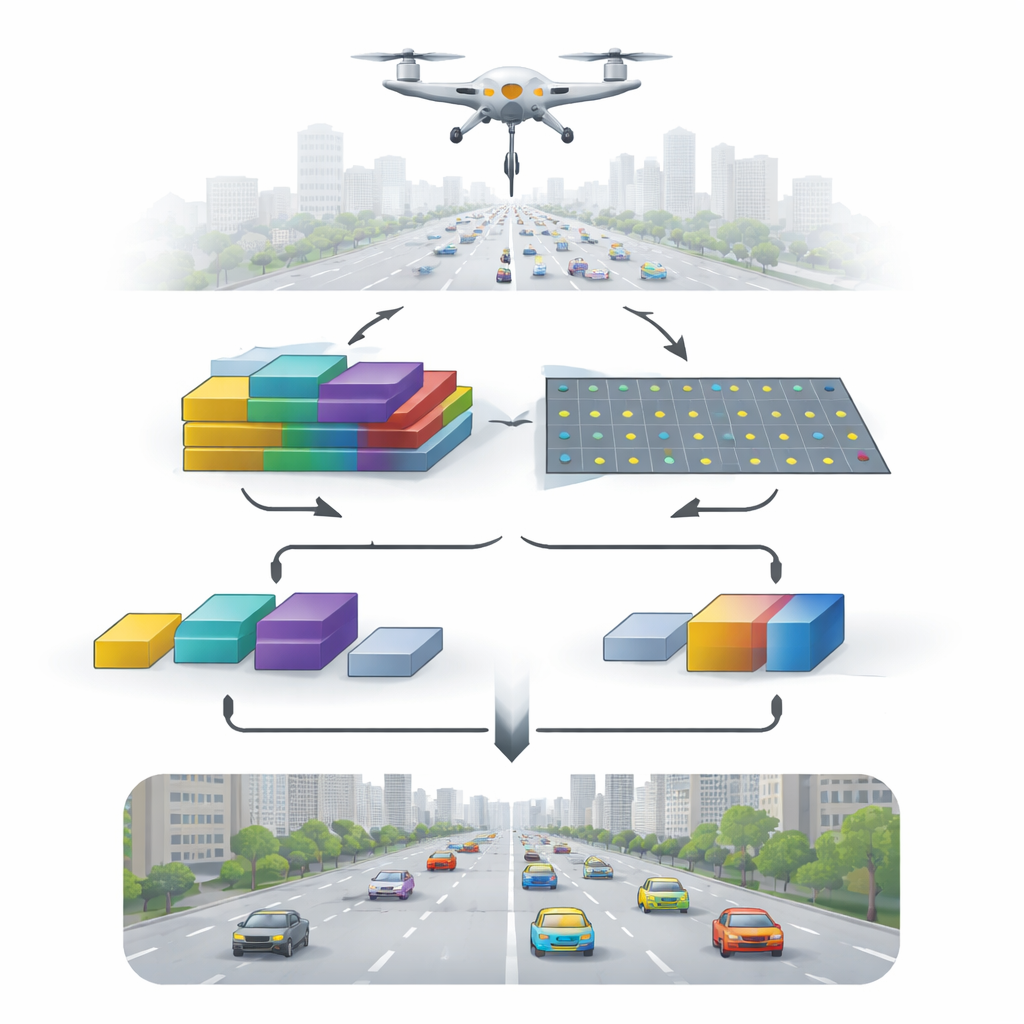
Yazarlar, mevcut nesne tespitçilerine eklenebilecek ve İHA trafik sahnelerinde küçük hedefleri tespit etme yeteneğini artırmaya yönelik uyarlanabilir kanal ağırlıklı füzyon modülü (ACFM) öneriyor. Tüm görsel bilgileri eşit şekilde ele almak yerine ACFM, paralel olarak çalışan iki uzman dalı işletir ve ardından bunların çıktısını sahneye bağlı bir şekilde birleştirir. Bir dal, ölçekler arası özelliklerin nasıl işlendiğini rafine ederek ince mekânsal detayların yıkanmasını önler. Diğer dal ise bir spot ışığı gibi davranarak gerçekten önemli küçük nesne işaretlerini güçlendirir ve dikkat dağıtan arka plan desenlerini bastırır. Kritik olarak, bu dallar arasındaki füzyon sabit değildir. ACFM, mevcut görüntüye göre hangi dala ne kadar güveneceğini ayarlar; böylece sakin bir otoyol ile yoğun bir kavşağa farklı tepkiler verilmesini sağlar.
Ölçekler Arası Detayları Korumak
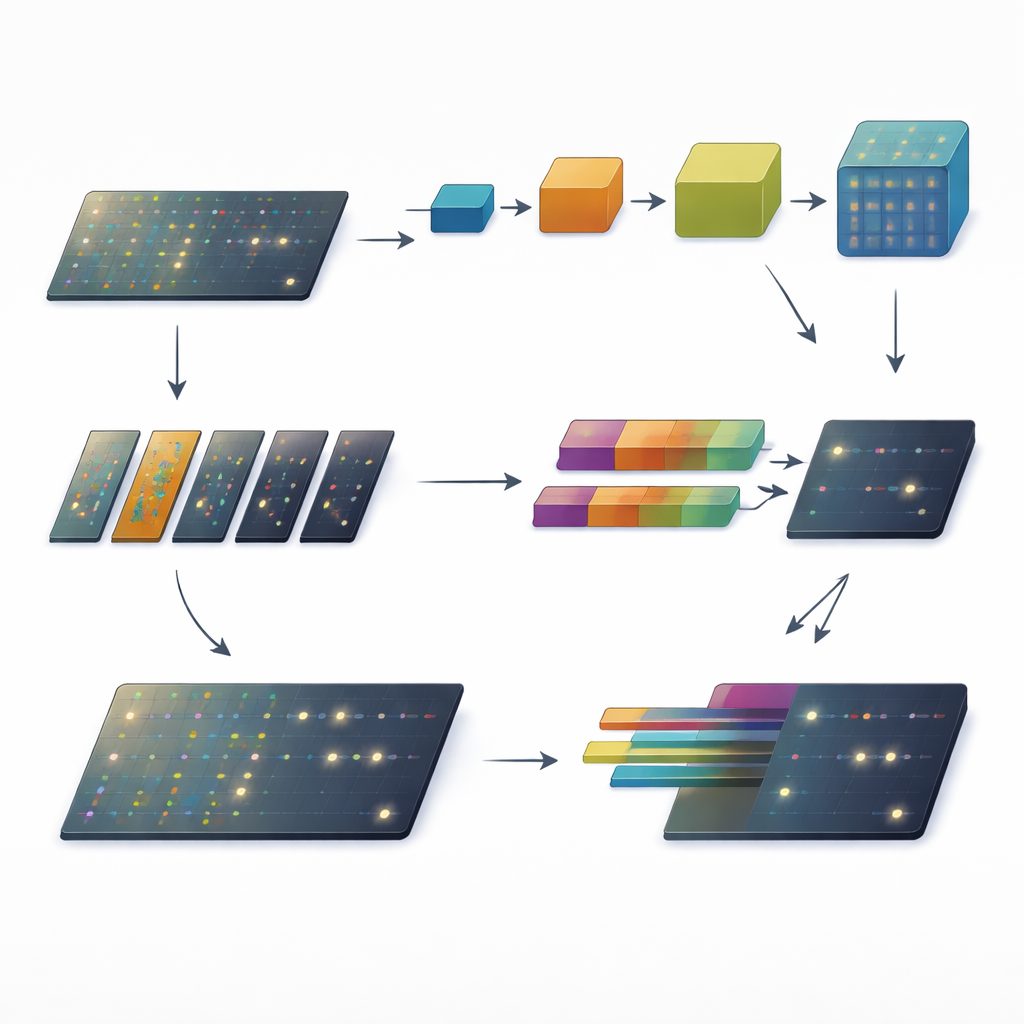
İlk dal, çok ölçekli rafine bloğu olarak adlandırılır; ağ özellikleri bir çift yol üzerinden gönderir. Bir yol orijinal bilgiyi basitçe korur ve ince, yüksek çözünürlüklü detayların yaşamasını sağlar. Diğer yol ise görüntü temsiliyi sıkıştırır ve sonra genişleterek modelin küçük araçların sahnedeki konumlarını daha geniş bağlamda anlamasını teşvik eder. Sonunda bu yollar birleştirilir, böylece her çıkış pikseli hem keskin yerel detaylardan hem de çevresel alanın anlaşılmasından fayda sağlar. Bu, arka plan kalabalık veya kısmen örtülü olsa bile dedektörün farklı boyutlardaki küçük otomobil ve otobüslerin etrafında daha sıkı, tutarlı sınırlayıcı kutular çizmesini kolaylaştırır.
Arka Plan Gürültüsünü Kısma
İkinci dal dikkat üzerine yoğunlaşır. Özellik kanallarını gruplara ayırır ve her grup için yalnızca en umut verici bölgeleri vurgulayan seyrek bir “maske” öğrenir. Yol yüzeyleri, çatı kaplamaları, ağaç tepeleri gibi arka plana benzeyen alanlar azaltılırken, araçların yansımaları ve kenarları gibi küçük ama anlamlı sinyaller güçlendirilir. Bu keskinleştirilmiş detaylar kontrollü bir şekilde orijinal özelliklerle yeniden birleştirildiğinde, bu gruplanmış seyrek dikkat dalı sahnenin daha temiz ve daha ayırt edici bir görünümünü üretir. Bu, dedektörün asfalt üzerindeki desenleri veya binaların oluşturduğu gölgeleri gerçek araçlarla karıştırma olasılığını azaltır.
Sahnenin Karışıma Karar Vermesine İzin Vermek
ACFM’in son parçası, kanal düzeyinde uyarlanabilir bir ağırlıklandırma mekanizmasıdır; kanal kanal karar vererek her dalın ne kadarına güvenileceğini belirler. Önce tüm görüntüde neler olduğunu özetler, sonra sıfır ile bir arasında ağırlıklar çıkarmak için hafif bir işlem kullanır. Sahne basitse ve nesneler iyi ayrılmışsa ağ daha çok çok ölçekli rafinelemeye yönelebilir. Sahne yoğun, dağınık veya gürültülü ise arka plan dikkatini bastıran dikkat dalına daha fazla vurgu yapabilir. Bu dinamik dengeleme, katı, el yapımı füzyon kurallarının yerini otomatik, veri odaklı bir stratejiyle değiştirir ve dedektörün bir kareden diğerine koşullar değiştikçe esnek tepki vermesini sağlar.
İHA Trafiği İçin Daha Keskin Gözler
Popüler bir dedektör olan GFL’ye eklendiğinde ve üç halka açık İHA trafik veri kümesi üzerinde test edildiğinde, ACFM özellikle birçok küçük, örtüşen aracın bulunduğu zorlayıcı setlerde tespit puanlarını tutarlı şekilde iyileştirdi. Doğruluk artışları çok az ek hesaplama maliyetiyle geldi; bu da geliştirilmiş sistemin pratik trafik gözetimi için kritik bir gereksinim olan gerçek zamana yakın çalışmaya devam edebileceği anlamına geliyor. Uzman olmayanlar için sonuç basittir: detayları koruyarak, gürültüyü bastırarak ve özelliklerin sahneye göre nasıl birleştirileceğini uyarlayarak ACFM, İHA’ların katı desen eşleyicilerden daha çok dikkatli insan gözlemciler gibi davranmasına yardımcı olur ve geleceğin akıllı şehir ve hava gözetim uygulamaları için daha güvenilir bir temel sunar.
Atıf: Liu, S., Zhu, H., Yuan, Z. et al. ACFM: adaptive channel weighted fusion algorithm for improving small object detection performance in UAV traffic. Sci Rep 16, 8366 (2026). https://doi.org/10.1038/s41598-026-39789-6
Anahtar kelimeler: drone trafik izleme, küçük nesne tespiti, bilgisayarla görme, dikkat mekanizmaları, çok ölçekli özellik füzyonu