Clear Sky Science · tr
PMSM’in ardışık model öngörülü doğrudan hız kontrolü
Günlük elektrikli motorlar için daha akıllı kontrol
Elektrikli motorlar fabrikalardaki üretim hatlarını, pompaları, robotları ve bazı ev aletlerini sessizce çalıştırır. Bu motorların verimli ve dengeli çalışmasını sağlamak enerji tasarrufu, gürültü ve aşınmanın azalması ve güvenilirliğin artması anlamına gelir. Bu makale, popüler bir motor türünü değişikliklere hızlı tepki verecek şekilde kontrol etmenin yeni bir yolunu inceliyor; amaç kararsızlığa veya aşırı elektriksel “gürültü” oluşumuna yol açmadan hızlı tepki. Yazarlar, mühendisler için ayarlamanın daha basit olacağını vaat eden, aynı zamanda hızlı ve doğru hız kontrolü sağlayan bir stratejiye odaklanıyor.
Bugünün motor kontrollerinin neden ayarlanmasının zor olduğu
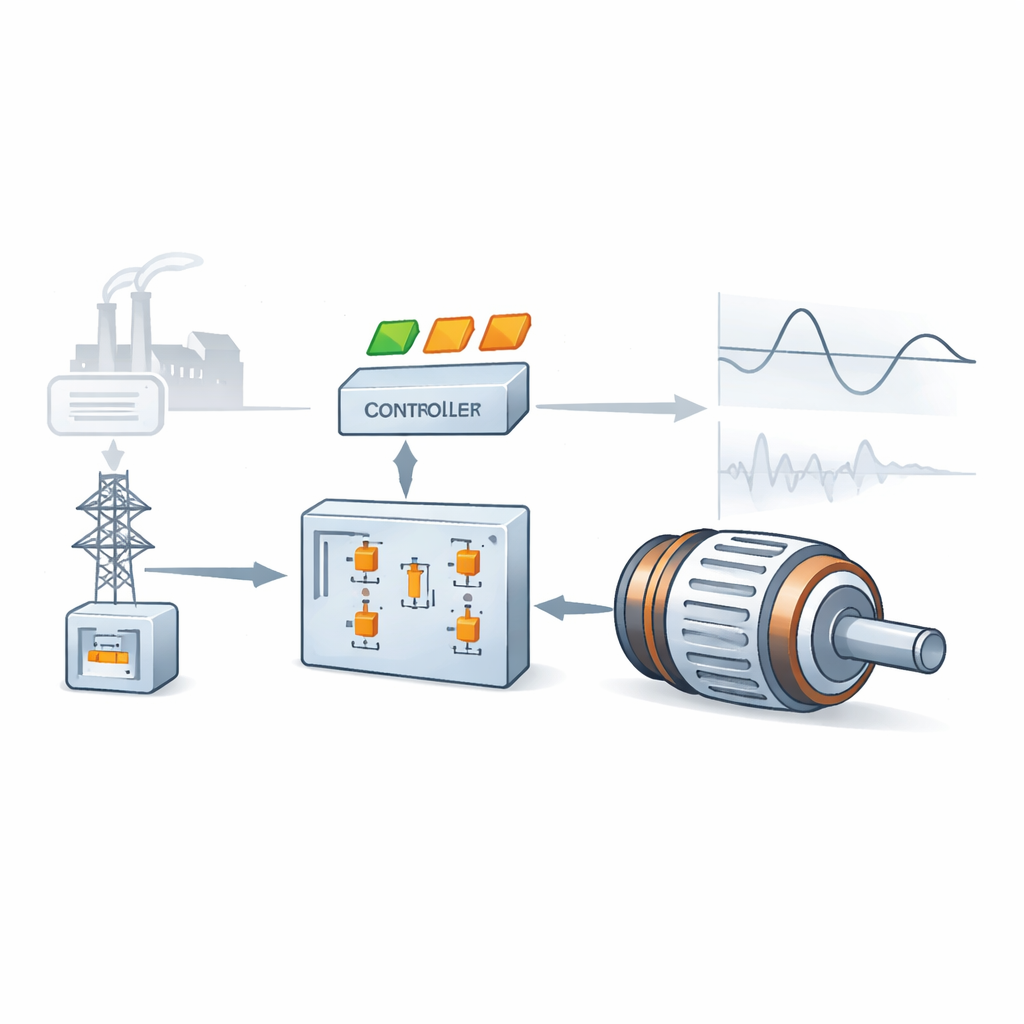
Sabit mıknatıslı senkron motorlar, kompakt, verimli ve hassas hız kontrolü yetenekleri nedeniyle yaygın olarak kullanılır. Geleneksel kontrol şemaları birkaç iç içe döngüye ve mühendislerin deneme-yanılma ile ayarlaması gereken çok sayıda ayar düğmesine dayanır. Öngörülü kontrollere dayanan daha yeni yaklaşımlar, motor için en iyi hareketi geleceğe bir kırık saniye kadar öngörerek seçmeye çalışır; bu, tepki süresini iyileştirir ve aynı anda birden fazla hedefin (örneğin doğru hız ve düşük akım tüketimi) ele alınmasına olanak sağlar. Ancak bu öngörülü kontrolörler tipik olarak tüm hedefleri birkaç “ağırlık faktörüne” bağlı büyük bir matematiksel ifadede birleştirir. Bu ağırlıkları seçmek kötü şöhretlidir: iyi bir seçim mükemmel performans verebilirken, kötü bir seçim sistemi yavaşlatabilir veya hatta kararsız hale getirebilir.
Karar vermede adım adım yaklaşım
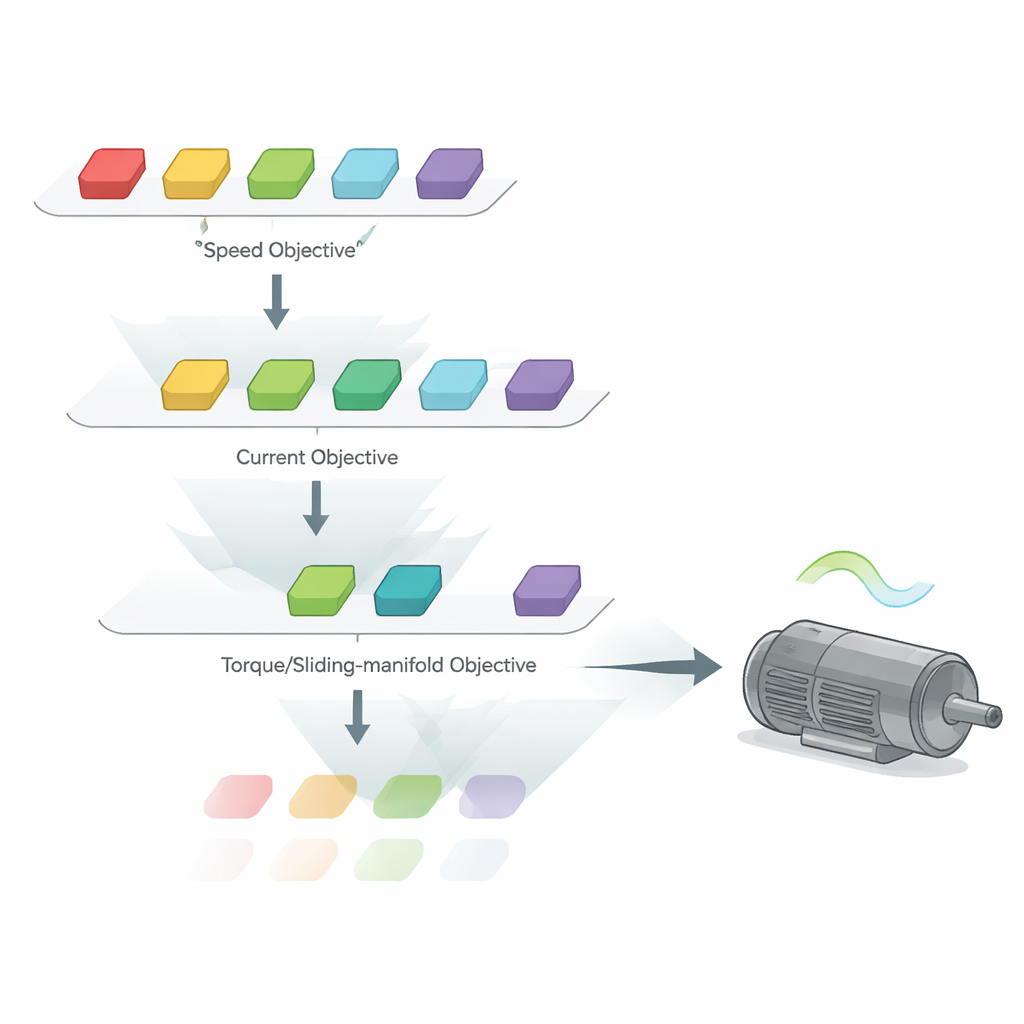
Tüm hedefleri tek bir karmaşık formüle sıkıştırmak yerine, yazarlar bir “ardışık” yaklaşımı inceliyor. Burada kontrolör hâlâ güç elektroniğindeki her olası anahtar konumu için motorun nasıl davranacağını tahmin eder, fakat basit, ayrı hedefleri ardışık olarak değerlendirir. Önce zayıf hız davranışı verecek anahtar seçeneklerini eler. Sonra kalan seçenekler arasından yalnızca akımı verimli kullananları tutar. Son olarak, hız hatası ile tork hatasını bağlayan özel bir kaydırmalı kural kullanarak motor torkunu en iyi şekilde şekillendiren seçeneği belirler; bu sayede motor hızı daha hızlı yakınsar. Her adım tek bir hedefe odaklandığı için birden fazla ağırlık faktörünü dengelemeye gerek yoktur; bunun yerine mantıksal bir elme süreci kullanılır. Bir eşlik eden gözlemci şafttaki bilinmeyen yük torkunu tahmin eder, böylece motor rahatsızlandığında bile tahminler doğru kalır.
Geliştirilmiş tasarımla kararlılığı artırmak
Yazarlar bu ardışık yöntemi ilk test ettiklerinde, hız değişimlerine hızlı tepki verdiğini ancak özellikle daha hızlı tepki almayı zorladıklarında kararsızlaşabildiğini ve motor akımında büyük dalgalanmalar ürettiğini gördüler. Bunu düzeltmek için bir geliştirilmiş versiyon önerdiler: ilk karar adımına zekice bir ekleme yaptılar; kontrolör yalnızca öngörülen hıza bakmakla kalmayıp belirli akım bileşenlerini nazikçe cezalandırıyor ve bu cezayı istenen hızla ölçeklendiriyor. Düşük hızlarda kontrolör daha çok akımların sakin kalmasına odaklanıyor; yüksek hızlarda ise performansı korumak için daha güçlü eyleme izin veriyor. Bu değişiklik, tork için daha agresif bir kaydırmalı kuralın tetiklemeye yol açmadan kullanılmasını mümkün kılıyor. Ayrıntılı bilgisayar benzetimlerinde, geliştirilmiş yöntem iyi ayarlanmış geleneksel bir öngörücü kontrolörün yükselme süresine eşdeğer performans gösterdi ve benzer düzeyde elektriksel bozulma üretti; üstelik daha az ayar parametresiyle.
Yöntemin laboratuvarda sınanması
Ekip daha sonra hem orijinal hem de geliştirilmiş ardışık kontrolörleri hızlı prototipleme platformu kullanarak gerçek bir 1,1 kilovatlık motor sürücüsünde uyguladı. Bunları gerçekçi koşullar altında, hızlı hız rampaları, ani yük uygulamaları ve hatta hız terslemeleri dahil olmak üzere, standart bir öngörücü kontrolörle karşılaştırdılar. Orijinal ardışık kontrolör hızı düzenleyebiliyordu, ancak özellikle yüksek hızlarda ara sıra kararsızlık ve güçlü akım dalgalanmaları gösterdi. Buna karşılık, geliştirilmiş versiyon test edilen aralıkta kararlı çalıştı. Kaydırmalı kuralı şekillendiren tek bir ana parametreyi ayarlayarak araştırmacılar daha sıkı hız izleme ile daha düzgün akım dalga biçimleri arasında takas yapabildiler. Ara ayarlar pratik bir denge sağladı: tutucu ayarlara kıyasla hız hataları önemli ölçüde azaltıldı, akım bozulmasındaki artış ise kabul edilebilir düzeyde kaldı.
Gerçek dünya sürücüleri için anlamı
Uzman olmayanlar için temel mesaj, yazarların yüksek performanslı elektrikli motorları kontrol etmek için daha basit ama yine de güçlü bir yol gösterdikleridir. Geliştirilmiş ardışık strateji, geleneksel öngörücü kontrolörlerin ayarlanmasında gerekli olan tahmin işlerinin çoğunu ortadan kaldırırken hız değişimlerine ve rahatsızlıklara karşı hızlı tepkileri koruyor. Yöntem kusursuz değil—özellikle çok talepkar ayarlarda akım dalga biçimleri hâlâ idealden biraz daha gürültülü olabiliyor—ancak daha sağlam, devreye alınması kolay sürücülere doğru önemli bir adımı temsil ediyor. Gelecek çalışmalar bu akım bozulmalarını azaltmaya ve kararlılığı daha derinlemesine analiz etmeye odaklanacak; amaç bu tür akıllı, ardışık kontrolün daha büyük, daha sıkı düzenlenen endüstriyel sistemler için uygun hale gelmesini sağlamak.
Atıf: Pancurák, L., Horváth, K. & Kyslan, K. Sequential model predictive direct speed control of PMSM. Sci Rep 16, 8226 (2026). https://doi.org/10.1038/s41598-026-39256-2
Anahtar kelimeler: sabit mıknatıslı senkron motor, model öngörücü kontrol, motor hız kontrolü, ardışık kontrol, güç elektroniği sürücüleri