Clear Sky Science · tr
Endüstriyel saha ortamında yüksek özellik benzerliğine sahip mekanik parçaların akıllı tanıma yöntemleri üzerine araştırma
Benzer görünen parçaları ayırt etmenin önemi
Modern fabrikalar, binlerce küçük metal parçayı bulmak, almak ve monte etmek için robotlara güvenir. Bu parçaların pek çoğu — dişliler, rulmanlar, zincir dişlileri, somunlar ve vidalar — özellikle sert aydınlatma altında veya bir bant üzerinde üst üste geldiklerinde şaşırtıcı derecede benzer görünür. Bir robot birini diğerine karıştırırsa, tıkanmalara, hatalara ya da hatta makine hasarına yol açabilir. Bu çalışma, görünüşte basit ama sanayi açısından büyük sonuçları olan bir soruyu ele alıyor: kompakt, hızlı bir görsel sistem gerçek atölye koşullarında neredeyse özdeş parçaları nasıl güvenilir şekilde ayırt edebilir?
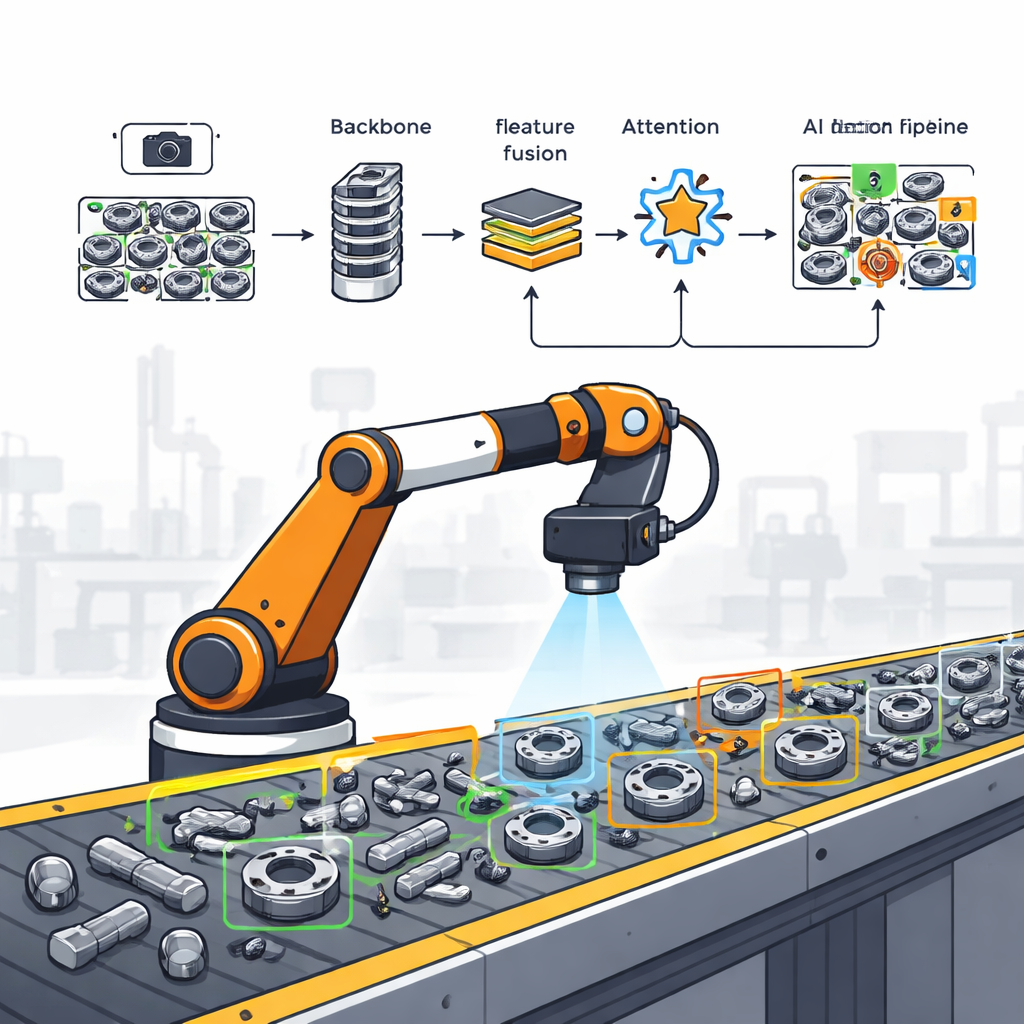
Gerçek fabrika görüşündeki zorluklar
Fabrika zemininde kameralar gösteri videolarındaki temiz görüşlere nadiren sahiptir. Aydınlatma düzensizdir; bu da parlak metallerde güçlü yansımalar ve diğer bölgelerde derin gölgeler oluşturur. Parçalar kutulara dökülür veya bantlar üzerinde dağılır, sıklıkla birbirlerini kısmen örterler. Durumu daha da zorlaştıran ise birçok metal bileşenin benzer şekil, renk ve dokuya sahip olmasıdır; belirgin görsel ipuçları çok azdır. Şablon eşleştirme veya elle tasarlanmış özelliklere dayanan geleneksel yazılımlar bu koşullarda kötü performans gösterir: yavaştır, değişen ışığa karşı kırılgandır ve parçalar üst üste geldiğinde veya beklenmedik şekilde döndüğünde sıklıkla başarısız olur.
Hızlı tek-geçişli algılayıcıların üzerine inşa etmek
Son yıllarda YOLO ("You Only Look Once") adı verilen ve görüntüdeki nesneleri tek, hızlı bir geçişte tespit eden bir yapay zeka model ailesi popüler hale geldi. En yeni sürümlerden biri olan YOLOv8, zaten doğruluk ve hız arasında iyi bir denge kuruyor ve gerçek zamanlı çalışabiliyor. Ancak farklı parçalar neredeyse aynı göründüğünde, YOLOv8 bile ince ipuçlarını kaçırabilir veya belirsiz kutular çizebilir. YOLO modellerini küçük cihazlara küçültme girişimleri genellikle parametreleri kısarken, ince ayrıntıları temsil etme yeteneğini de zayıflattı; oysa benzer görünen mekanik parçaları ayırt etmek tam da bu hassas detayları gerektirir.
Daha yalın ama daha keskin bir algılama ağı
Yazarlar, özellikle karışık endüstriyel parçalar ve sınırlı hesaplama gücüne sahip donanım için uyarlanmış en küçük YOLOv8 modelinin (YOLOv8n) geliştirilmiş bir versiyonunu öneriyor. Önce ağın standart çekirdeğini, her adımda görüntünün en yararlı bölgeleri üzerinde çalışmak için "kısmi" bir konvolüsyon hilesi kullanan daha yeni bir tasarım olan FasterNet ile değiştiriyorlar. Bu, ana görsel bilgileri kaybetmeden bellekteki tekrarlanan işleri azaltır. İkinci olarak, ağın orta bölümündeki "boyun"u çift yönlü bir özellik piramidi (BiFPN) kullanacak şekilde yeniden tasarlıyorlar; bu, bilgilerin kaba, küresel görünümlerden ince detaylara ve ince detaylardan tekrar yukarı doğru akmasını sağlar, böylece küçük, örtüşmüş parçalar bağlamdan fayda sağlar ve tersine de ince ayrıntılar küresel algıya katkıda bulunur.
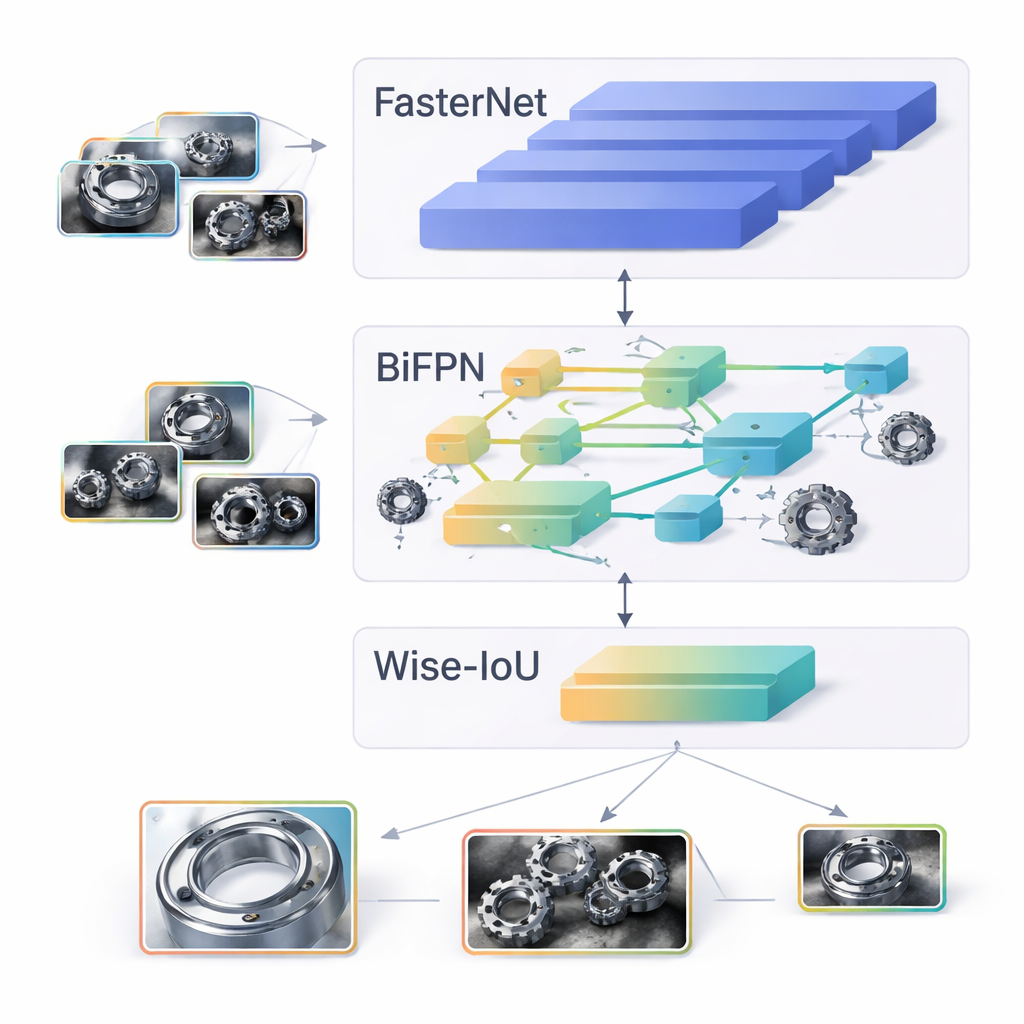
Ağa kötü ipuçlarını yoksaymayı öğretmek
Ağın yapısının ötesinde, iç ayarlarını nasıl öğrendiği — bir kayıp fonksiyonuyla yönlendirilen — neye dikkat ettiğini güçlü biçimde etkiler. Standart eğitim yöntemleri tüm örnekleri aşağı yukarı eşit şekilde ele alır; bu da düşük kaliteli eğitim kutularının (kötü hizalanmış veya belirsiz) modeli yanıltabileceği anlamına gelir. Yazarlar, yaygın kullanılan kutu eşleştirme kuralını Wise‑IoU adlı bir yöntemle değiştiriyor. Basitçe söylemek gerekirse, bu yaklaşım her eğitim örneğini yalnızca örtüşmeye göre değil, aynı zamanda ne kadar "aykırı" olduğuna göre puanlıyor ve güvenilmez örneklerin etkisini kademeli olarak azaltıyor. Zamanla sistem, özellikle parçalar üst üste geldiğinde veya zorlu aydınlatma altında daha sıkı ve daha güvenilir tespit kutuları sağlayarak, çoğunlukla net, iyi etiketlenmiş parçalardan öğreniyor.
Sistemi teste sokmak
Tasarımını değerlendirmek için ekip, her biri farklı ışık seviyelerinde ve değişen örtüşme derecelerinde 1.250 kez yakalanmış altı yaygın mekanik parçadan oluşan kendi görüntü koleksiyonunu oluşturdu. İyileştirilmiş modellerini standart YOLOv8n ve birkaç diğer hafif algılayıcı ile karşılaştırdılar. Yeni sistem, genel tespit kalitesinde daha yüksek bir başarı elde ederken hesaplamanın üçte ikisinden daha azını kullandı ve parametre sayısını yaklaşık %42 oranında azalttı. Özellikle, yaygın olarak kullanılan bir eşiğin ortalama hassasiyet puanını 1.5 puan yükseltti ve yine de mütevazı donanımlarda gerçek zamanlı kullanım için yeterince verimli çalıştı.
Akıllı fabrikalar için anlamı
Günlük ifadeyle, çalışma fabrika robotlarının hem daha akıllı hem de daha yalın olabileceğini gösteriyor. Yeniden tasarlanmış ağ çekirdeği, daha akıllı özellik füzyonu ve daha seçici bir öğrenme kuralı ile küçük bir yapay zeka modeli, dağınık, gerçek dünya sahnelerinde, düşük ışıkta ve parçalar üst üste geldiğinde bile dişliler, rulmanlar ve diğer benzer parçalar arasındaki farkı daha güvenilir biçimde ayırt edebiliyor. Daha yüksek doğruluk ile daha düşük hesaplama yükünün bu birleşimi, düşük maliyetli uç cihazlarda sağlam görsel algılamayı dağıtmayı kolaylaştırıyor ve büyük sunuculara veya kusursuz kontrollü ortamlara ihtiyaç duymadan daha esnek, tam otomatik üretim hatlarının yolunu açıyor.
Atıf: Lu, C., Ye, X., Wu, J. et al. Research on intelligent recognition method of mechanical parts with high feature similarity in industrial field environment. Sci Rep 16, 7640 (2026). https://doi.org/10.1038/s41598-026-39036-y
Anahtar kelimeler: endüstriyel nesne algılama, mekanik parçalar, hafif derin öğrenme, YOLOv8, fabrika otomasyonu