Clear Sky Science · tr
Video tanıma için araç yolculuğu verilerinin yeniden oluşturma stratejisi: enterpolasyon filtrelemenin iki aşamalı yöntemi
Sayısal trafik verilerini temizlemenin önemi
Her trafik kamerası bir kavşakta araçların hareketini izlediğinde, her aracın nereye gittiğini, ne hızla hareket ettiğini ve nasıl hızlanıp fren yaptığını tanımlayan gizli bir veri akışı oluşturur. Bu bilgiler daha güvenli yollar, daha akıllı trafik ışıkları ve geleceğin otonom araçları için çok değerlidir. Ancak gerçekte bu veriler dağınıktır: araçlar kamyonların arkasına saklanır, yağmurda farlar parıldar ve bilgisayarla görme sistemleri hatalar yapar. Bu çalışma çok pratik bir sorunu ele alır: hatalı video verilerini, araçların gerçekte nasıl hareket ettiğine güvenilebilir bir kayda nasıl dönüştürebiliriz?
Kameralar araçların hareketini yanlış okuduğunda
Video tabanlı takip çekicidir çünkü ucuzdur, müdahalesizdir ve geniş alanları kapsar. Yine de ham çıktı iki ana sorunla doludur. Birincisi bariz hatalardır; örneğin bir aracın geriye sıçradığı, otoyol hızından aniden durduğu veya imkânsız hızlanma patlamaları gösterdiği durumlar. Bunlar genellikle örtülme, hareket bulanıklığı veya takip yazılımının aracı geçici olarak kaybetmesi nedeniyle ortaya çıkar. İkincisi rastgele titreşimdir—rapor edilen konumda küçük, hızlı sallantılar. Hız ve ivme bu konumlardan hesaplandığında, bu sallantılar abartılır ve normal sürüş düzensizmiş gibi görünür. Düzeltilmezse bu sorunlar trafik modellerini yüzde 40’tan fazla çarpıtabilir; bu da güvenlik araştırmalarını ve otomatik sürüş sistemlerini yanıltabilir.
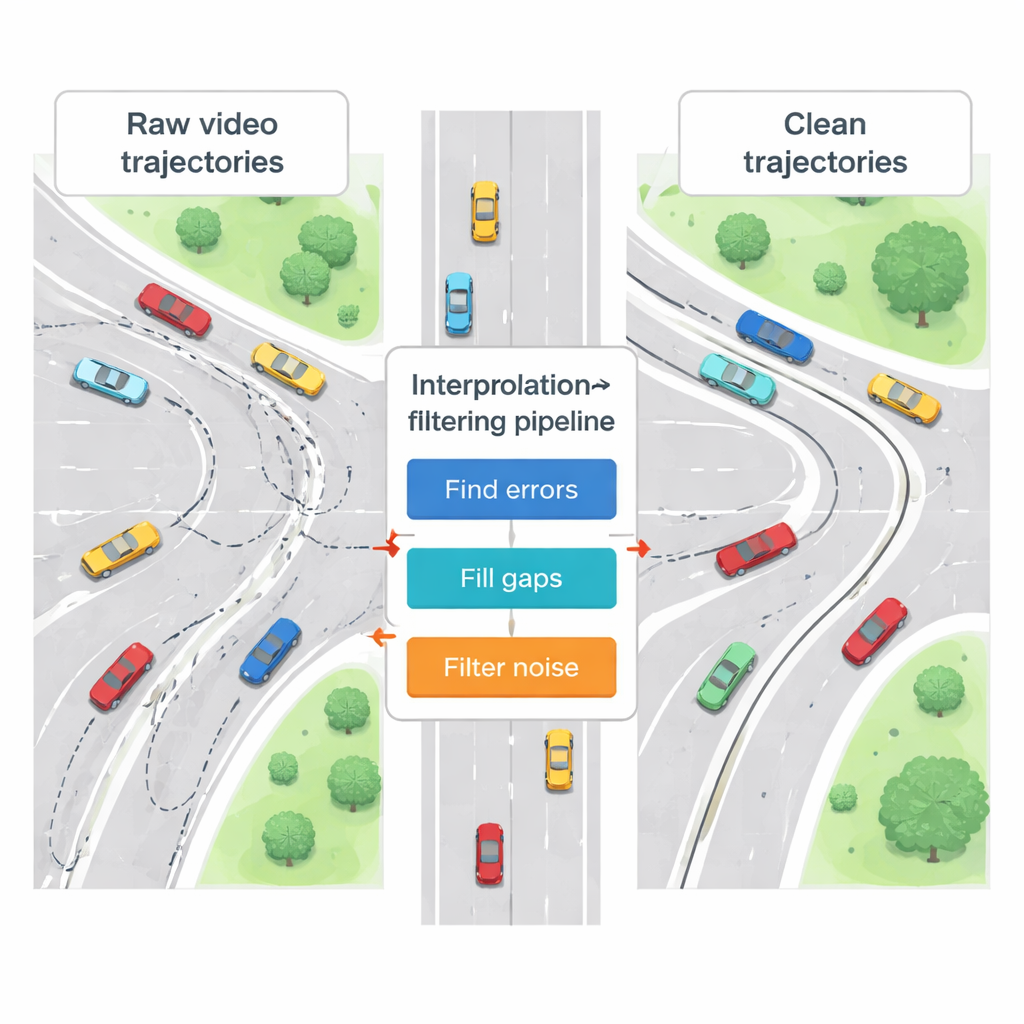
İki aşamalı temizlik planı
Bu hasarı onarmak için yazarlar dikkatli bir dijital tamirci gibi işleyen iki aşamalı bir yeniden oluşturma stratejisi öneriyor. Birinci adım bariz hatalara odaklanır: her aracın kaydını, çok ani ivme değişimleri (çok ani jerk) veya gerçek bir araç ve sürücünün dayanamayacağı kadar yüksek ivme gibi basit fiziksel sınırları çiğneyen hız ve ivmeleri tarar. Bu aykırı noktalar bulunduğunda, yakınındaki daha güvenilir noktalardan eksik değerleri tahmin etmek için enterpolasyon adı verilen matematiksel araçlarla yerleri değiştirilir. Çalışma çeşitli enterpolasyon yaklaşımlarını karşılaştırır ve hareket karmaşık olduğunda Hermite enterpolasyonunun geleneksel Lagrange yöntemine göre yörüngenin doğal şeklini daha iyi koruduğunu bulur.
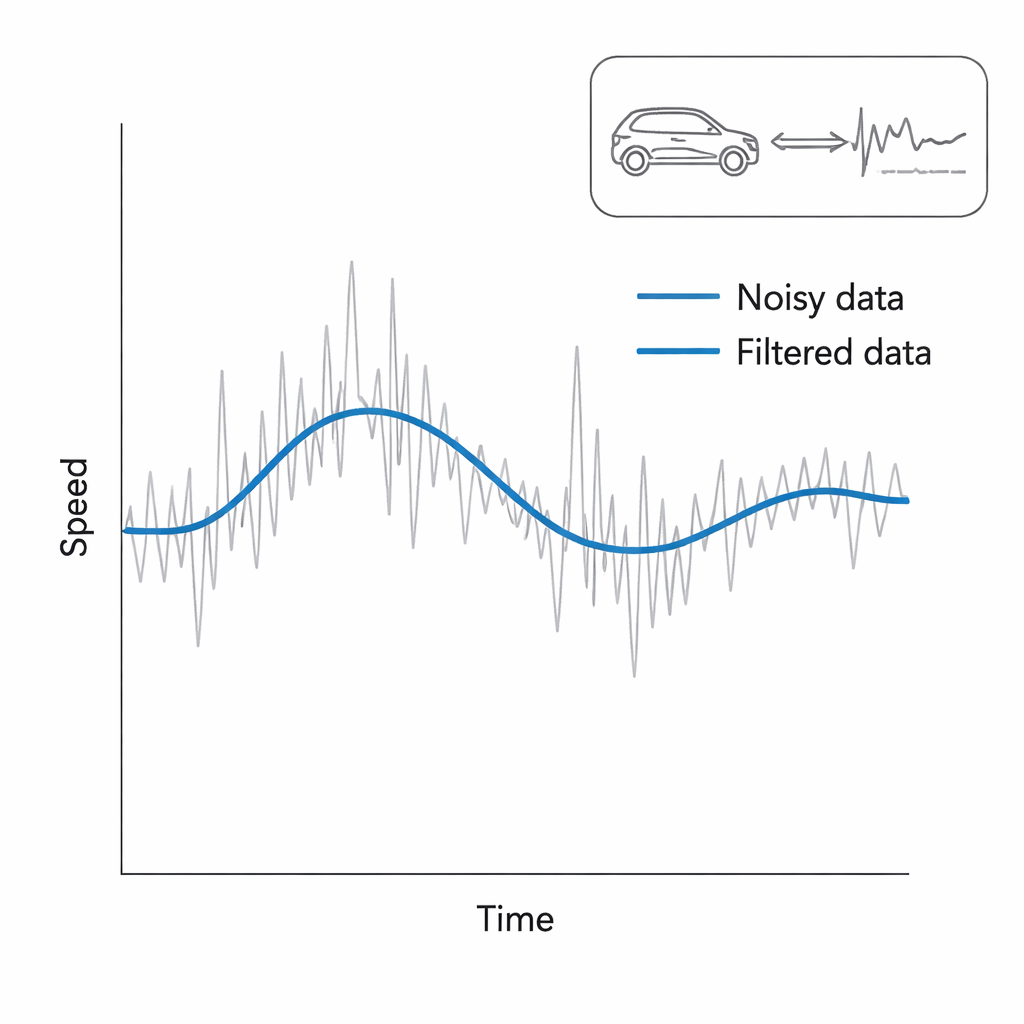
Sayılsal sürüşü düzeltme
İkinci adım daha ince bir gürültü sorununu ele alır. Kaba hatalar düzeltildikten sonra bile kalan izler hâlâ hafifçe titrek görünebilir. Burada araştırmacılar veriyi yumuşatmanın iki yolunu test eder: daha yeni noktalara daha fazla ağırlık veren geliştirilmiş bir hareketli ortalama yöntemi ve yeni ölçümler geldikçe bir aracın gerçek konum ve hızına dair en iyi tahminini sürekli güncelleyen istatistiksel bir teknik olan Kalman filtresi. Her iki teknik de titreşimi yatıştırır, ancak Kalman filtresi gerçek sürüş değişikliklerini—örneğin nazik bir fren veya şerit değişikliği—bulanıklaştırmadan takip etmede daha başarılıdır. Sonuç, her bir aracın zaman içinde aslında nasıl davrandığına dair daha düzgün ve daha gerçekçi bir tanımlamadır.
Yöntemi teste sokmak
Ekip çerçevelerini Çin’in Zhengzhou kentindeki yoğun bir kentsel kavşakta yakalanan gerçek videoya uyguluyor; araç yollarını çıkarmak için modern nesne algılama ve izleme yazılımları kullanıyorlar. Ardından onlarca farklı araç izini iki aşamalı süreçten geçiriyor ve başarıyı basit fiziksel ölçütlerle değerlendiriyorlar: ivmenin ne kadar değişken olduğu ve jerk’in yolcu arabaları için gerçekçi olmayan bir seviyeyi ne sıklıkta aştığı. Ayrıca temizlenmiş video tabanlı yörüngeleri doğrudan bir aracın gösterge paneli aletlerinden kaydedilen gerçek verilerle karşılaştırıyorlar. Sabit seyir, sert fren, şerit değişikliği gibi birçok sürüş deseninde, enterpolasyon ve filtrelemenin birleşimi ivme değişkenliğini yaklaşık yüzde 85 oranında azaltıyor ve gerçekçi olmayan jerk zirvelerini neredeyse ortadan kaldırıyor; ayrıca alet tabanlı kayıtlara birkaç rakip yönteme kıyasla daha yakın eşleşme sağlıyor.
Günlük yolculuklar için ne anlama geliyor
Basitçe söylemek gerekirse, bu makale sıradan trafik kameralarından elde edilen kusurlu görüntüleri mühendislerin ve otomatik araçların gerçekten güvenebileceği verilere dönüştürmenin yolunu gösteriyor. Önce bariz aksaklıkları onarıp sonra gürültüyü dikkatle yumuşatarak önerilen yöntem, egzotik donanım veya yoğun hesaplama gücü gerektirmeden araçların nasıl hareket ettiğine dair gerçekçi dijital izler üretiyor. Bu daha temiz veri, daha iyi trafik ışığı zamanlamalarına, sıkışıklığın daha doğru simülasyonlarına ve gerçek dünya sürüş davranışını anlamaya dayanan daha güvenli otonom sürüş algoritmalarına kaynak sağlayabilir. Çalışma bir şehre odaklanıyor ve henüz her hava veya yol koşulunu kapsamasa da, mevcut video ağlarını bir sonraki nesil akıllı ulaşım sistemleri için güvenilir sensörler olarak kullanmaya yönelik açık ve pratik bir yol sunuyor.
Atıf: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
Anahtar kelimeler: araç seyir yolu, trafik video verisi, veri gürültüden arındırma, akıllı ulaşım, otonom sürüş