Clear Sky Science · tr
Rüzgâr ve yük bozulmalarına karşı ESO tabanlı uyarlanabilir sinir ağı kontrolü ile bir quadrotor
Dağınık Gerçek Dünyada Drone’ları Dengede Tutmak
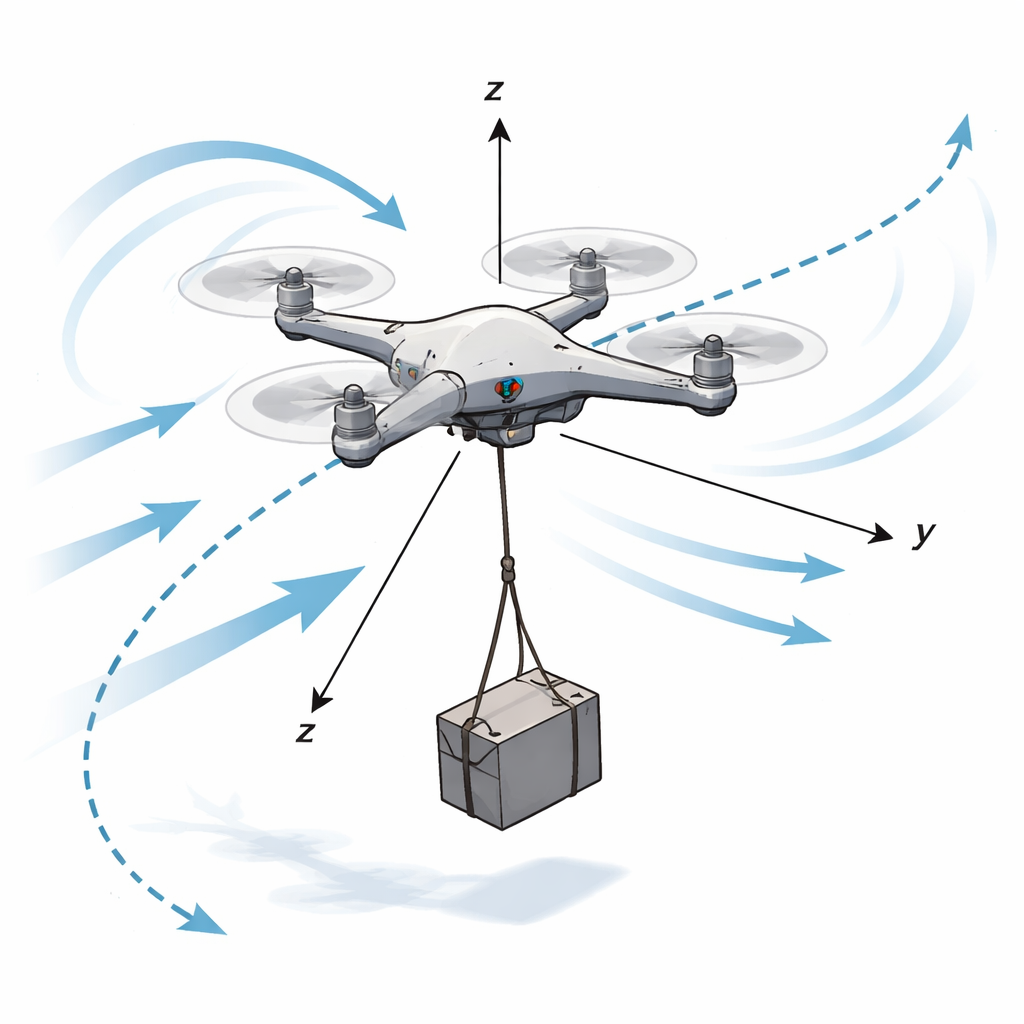
Küçük dört rotorlu dronlar köprü incelemeleri, tarla gözetimi veya küçük paket taşıma gibi işler için giderek daha fazla kullanılıyor. Ancak gerçek dünyada bu uçan robotlar, kolayca rotadan çıkmalarına yol açan sert rüzgârlar ve altında salınan dengesiz yüklerle karşılaşıyor. Bu makale, hava zorlu olduğunda ve salınan bir yük drone’u çekiştirdiğinde bile bu tür dronların planlanan yollar boyunca kararlı bir şekilde uçmasını sağlayan yeni bir yöntemi sunuyor.
Rüzgârın ve Askıda Yüklerin Neden Bu Kadar Sorunlu Olduğu
Bir quadrotor dronu doğası gereği kontrol etmek zordur. Hafiftir, küçük motor değişikliklerine hızlı yanıt verir ve farklı eksenlerdeki hareketleri birbirine sıkı sıkıya bağlıdır. Kuvvetli veya hızla değişen rüzgârlar drone’u öngörülemez şekilde iter. Bir kabloyla asılı yük eklemek —örneğin bir kamera düzeneği veya sıvı şişesi— durumu daha da kötüleştirir: yük bir sarkaç gibi salınarak drone’a ekstra kuvvetler geri besler. Yaygın kullanılan PID gibi geleneksel kontrolörler ya da daha gelişmiş kayan yüzey (sliding-mode) ve backstepping şemaları, ancak mühendisler drone’un fizikini çok doğru bildiğinde ve bozucu etkenler ılımlı olduğunda iyi çalışır. Matematiksel model yanlışsa ya da rüzgâr ve yük kuvvetleri karmaşık biçimde değişiyorsa, bu yöntemler ağır tepki, aşım veya uçuşta gözle görülür sallanma üretebilir.
Gizli Bozulmalar İçin Akıllı Bir Bekçi
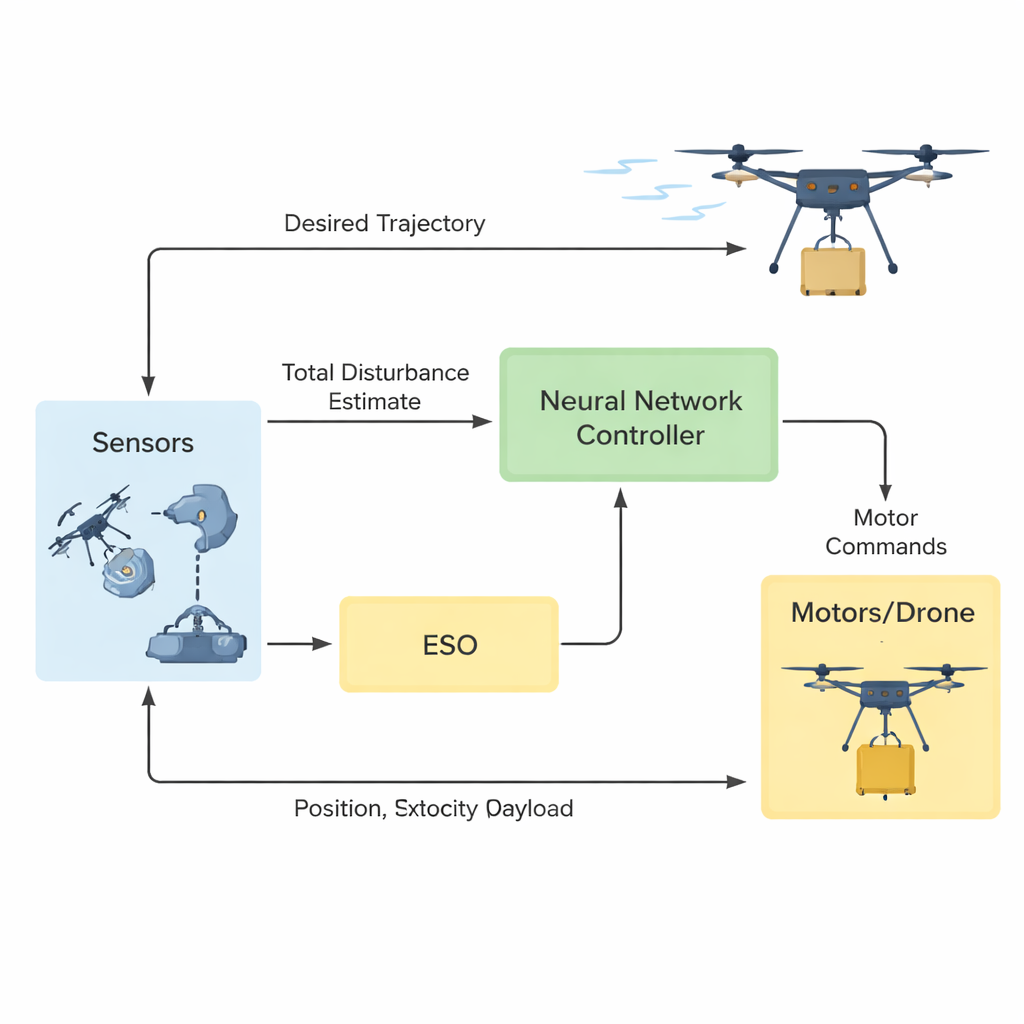
Bunu ele almak için yazarlar etkin bozulma reddetimi (active disturbance rejection) kavramını genişletiyor. Rüzgârın ve salınan yükün her ayrıntısını modellemeye çalışmak yerine, tüm bilinmeyen etkenleri tek bir “toplu” bozulma olarak ele alıyorlar. Özel tasarlanmış bir genişletilmiş durum gözlemcisi, drone’un hareketlerinden bu toplam bozulmayı sürekli çıkaran matematiksel bir bekçi gibi çalışıyor. Önemli olarak, gözlemci yalnızca tek bir ana parametre ile ayarlanıyor; bu da mevcut birçok tasarıma kıyasla kurulumun çok daha basit olmasını sağlıyor. Teori, uygun ayarlarla gözlemcinin bozulma tahmininin hızla yakınsadığını ve sıkı sınırlarla korunduğunu gösteriyor; yani bu tahmin kaba bir varsayım değil, gerçek zamanlı bir önden düzeltme olarak güvenilir.
Zor Kısımları Öğrenmesi İçin Bir Sinir Ağına İzin Vermek
İyi bozulma tahminleri olsa bile, kontrolörün motor komutlarının gerçekte nasıl harekete dönüştüğünü bilmesi gerekiyor—bu ilişki kütle, geometrik yapı ve zamanla değişebilecek diğer fiziksel ayrıntılara bağlıdır. Ayrıntılı bir model çıkarmaya güvenmek yerine, yazarlar bu ilişkiyi uçuş sinyallerinden doğrudan öğrenen radyal tabanlı fonksiyon sinir ağı (RBF sinir ağı) sunuyor. Kontrolörün bilmesi gereken tek şey drone’un nerede olduğu, gitmesi gereken yer ve istenen yolun ikinci türevi (hedef noktanın ne kadar hızlandığı). Bir uyarlayıcı kanun sinir ağının iç ağırlıklarını sürekli güncelleyerek izleme hatalarını azaltıyor. Lyapunov tabanlı analiz kullanılarak, yazarlar bu uyarlamalı şema altında izleme hatalarının üniform olarak sınırlı kaldığını ve istenirse tesadüfi küçük değerlere indirilebileceğini; ağırlık güncellemelerinin de kararlı kaldığını kanıtlıyorlar.
Yöntemi Teste Sokmak
Ekip yaklaşımını hem bilgisayar simülasyonlarıyla hem de gerçek dünya deneyleriyle doğruluyor. Simülasyonlarda drone’dan rastgele rüzgâr patlamaları ve zamanla değişen yük kuvvetleri altında zorlu üç boyutlu spiral yolları takip etmesi isteniyor. Yeni kontrolör, doğrusal etkin bozulma reddi, kayan yüzey kontrolü, model-olmayan sonlu kayan yüzey kontrolü ile ve daha zorlu bir testte uyarlamalı fraksiyonel mertebeden kontrol ile karşılaştırılıyor. Birden çok senaryoda önerilen yöntem özellikle bozucu etkiler eklendikten sonra daha düzgün yörüngeler ve daha küçük karekök-ortalama-kare (RMS) pozisyon hataları elde ediyor. Fiziksel testlerde araştırmacılar iç mekânda iki endüstriyel vantilatörün üflediği rüzgâr ve altında asılı 200 gramlık su şişesiyle bir quadrotoru uçuruyor. Hareket yakalama kameraları drone’un konumunu kaydediyor. Sürekli rüzgâr ve yüke elle çekişler uygulanmasına rağmen drone hedef noktasını birkaç santimetre içinde tutuyor ve motor komutları düzenli kalıyor; bu da yöntemin gerçek donanım için uygulanabilir olduğunu gösteriyor.
Günlük Drone Kullanımı İçin Anlamı
Uzman olmayanlar için temel çıkarım, bu çalışmanın dronları iç fiziklerini mükemmel bilmeye gerek kalmadan zor koşullarda daha güvenilir hale getirmenin bir yolunu sunmasıdır. Basit ama güçlü bir bozulma gözlemcisini öğrenmeye dayalı bir kontrolörle birleştirerek, sistem rüzgâr patlamalarına ve salınan yüklere uçuş sırasında uyum sağlayabilir ve minimum ayar çabasıyla drone’u rotada tutar. Bu tür sağlam, modele az bağımlı kontrol, şehirlerde, çiftliklerde ve fabrikalarda rutin görevler için dronların konuşlandırılmasını kolaylaştırabilir; aynı fikirler ileride drone takımlarına veya bazı bileşenler arızalandığında bile güvenli uçuşu sürdüren arıza-toleranslı tasarımlara da genişletilebilir.
Atıf: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
Anahtar kelimeler: quadrotor kontrolü, drone kararlılığı, rüzgâr bozulması, sinir ağı kontrolörü, yük takibi