Clear Sky Science · tr
Otonom mobil robotlar için dinamik dümen kontrolü ile geliştirilmiş saf takip ve kimya tesislerinde güvenli gezinme uygulaması
Güzergâhında Kalan Robotlar
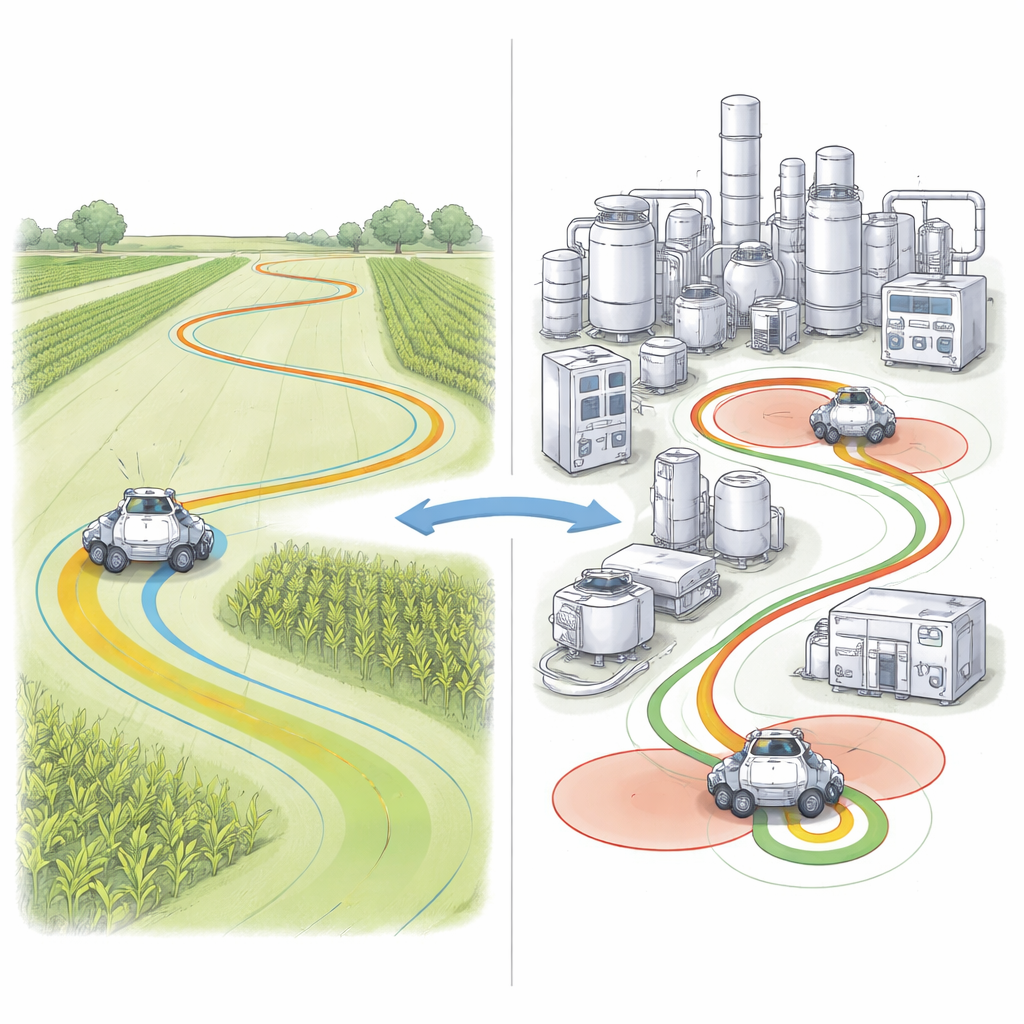
Robotlar temiz fabrika salonlarından tarlalara ve kimya tesislerine doğru ilerledikçe, dar güzergâhları yüksek doğrulukla izlemeleri gerekiyor. Küçük bir sallantı mahsullere zarar verebilir, borulara çarpabilir veya yanıcı gazların bulunduğu bir alana yuvarlanmasına neden olabilir. Bu makale, tekerlekli robotların hem geniş açık alanlarda hem de sıkışık endüstriyel sahalarda planlanmış rota yakınında kalabilmeleri için nasıl yönlendirilecekleri ve hızlarının nasıl kontrol edileceğine dair yeni bir yaklaşımı anlatıyor.
Bir Robotu Yönlendirmenin Zorluğu
Günümüzde birçok otonom mobil robot, bir rotayı izlemek için “saf takip” (pure pursuit) adını verdiğimiz basit kuralı kullanıyor. Robot rota boyunca kısa bir mesafeye bakıyor, o noktaya doğru yöneliyor ve bu işlemi hızlıca tekrarlıyor. Pratikte mühendislerin robotun ne kadar uzağa “baktığına” ve ne hızda hareket ettiğine karar vermesi gerekiyor. Eğer bakış mesafesi çok kısa olursa robot tedirgin tepki verir ve sağa sola savrulabilir. Çok uzun olursa tepki gecikir ve özellikle sık virajlarda veya daha yüksek hızlarda köşeleri kısaltır. Açık alanlarda başka bir zorluk daha ortaya çıkıyor: robotun konumu uydu sinyalleri, hareket sensörleri ve tekerlek devri verilerinin birleştirilmesiyle tahmin edilir; her birinin kendine özgü hata ve gecikmeleri vardır.
Daha Akıllı Bir Yönlendirme ve Hız Belirleme
Yazarlar, Saf Takip ile Dinamik Dümen Kontrolü (PP-DSC) adını verdikleri geliştirilmiş bir yöntem öneriyor. Bakış mesafesini ve hızı sabit tutmak yerine robot, dönme keskinliğine göre her ikisini de gerçek zamanlı olarak ayarlıyor. Dümen açısı küçük ve yol neredeyse düzse, robot daha uzun bir bakış mesafesi ve daha yüksek hız kullanarak pürüzsüz ve verimli bir yolculuk sağlıyor. Virajlarda dümen açısı arttıkça bakış mesafesi kısalıyor ve hız otomatik olarak düşüyor; bu da robotun tepki vermesi için daha fazla zaman tanıyor ve yanal sapmayı azaltıyor. Bu davranış, modern bir robotik yazılım çerçevesiyle birlikte yüksek hassasiyetli uydu konumlandırma, bir atalet sensörü ve tekerlek enkoderleri kullanan dört tekerlekli, araba benzeri bir robot üzerinde uygulanmış durumda.

Tarlalarda ve Sanal Kimya Tesislerinde Test
PP-DSC’nin performansını görmek için ekip, dış mekânda üç temel rotada—düz bir hat, bir halka ve sekiz biçimli bir rota—1 ila 5 metre/saniye hızlarda deneyler gerçekleştirdi. Yeni yöntemi standart saf takip yaklaşımıyla karşılaştırdılar. Geliştirilmiş denetleyici her durumda robotu planlanan rota yakınında çok daha iyi tuttu. Düz hatlarda ortalama yanal hata yaklaşık beş santimetreye düştü ve eğimli rotalarda hata sekiz santimetrenin altında kaldı. Buna karşılık geleneksel yöntem birkaç onlarca santimetre sürüklenme gösterebiliyor ve özellikle daha yüksek hızlarda viraja girip çıkarken daha büyük zirveler sergileyebiliyordu.
Tehlike Bölgelerinde Güvenlik Eklemek
Araştırmacılar ayrıca böyle bir robotun kimya tesisleri içinde nasıl davranabileceğini incelediler; örneğin sıcak reaktörleri denetlemek veya numuneler taşımakla görevlendirilebilir. Tam bir endüstriyel test yatağı kurmak yerine, ekip ekipman yerleşimleri ve yangın ile patlama riski yüksek bölgeleri içeren detaylı bir biyodizel tesisinin bilgisayar modelini kullandı. Denetleyiciyi, robot bu tehlike bölgelerine girdiğinde otomatik olarak hızını düşüren bir güvenlik faktörüyle genişlettiler; bu, proses güvenliğinde kullanılan standart bir yangın ve patlama indeksine dayanıyordu. Simülasyonlar, güvenliğe duyarlı PP-DSC versiyonunun izleme hatasını yalnızca çok hafif artırdığını—ortalama olarak yüzde birin altında—ve bunun karşılığında robotun tehlikeli ekipman çevresinde hızını azalttığını gösterdi.
Her İş İçin Doğru Aracı Seçmek
İlginç bir bulgu, tek bir dümen stratejisinin her yerde en iyi olmadığıydı. Nazik eğrili açık arazilerde dinamik yöntem, geleneksel yaklaşıma göre açık biçimde daha iyi performans gösterdi; robotun rotasını sıkı ve düzgün tutarak daha yüksek hızlarda bile iyi sonuç verdi. Ancak bir kimya tesisinin sıkışık geometrisinde basit, sabit bakış mesafeli saf takip bazen daha iyi sonuç verdi; özellikle dinamik bakış mesafesi yanlışlıkla robotu rotanın yanlış koluna yönlendirebileceği sıkı döngüler ve kendini kesen “sekiz” biçimli rotalarda. Yazarlar, robotların yol şekline göre stratejiler arasında geçiş yapması gerektiği sonucuna varıyorlar: orta eğrilikler ve tehlike farkındalığı gerektiren dolaşımda geliştirilmiş ve güvenlik entegreli denetleyiciyi kullanmak; çok sıkı veya döngüsel güzergahtlarda ise sabit bakış mesafeli şemaya geri dönmek. Uzman olmayanlar için kilit mesaj, gerçek dünya tesisleri ve tarlarda güvenli, güvenilir robot navigasyonunun yalnızca iyi haritalar ve sensörlerle ilgili olmadığı—robotun nereye baktığını ve ne hızla hareket ettiğini seçme biçiminin de bir o kadar önemli olduğudur.
Atıf: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
Anahtar kelimeler: otonom mobil robotlar, yol takibi, dümen kontrolü, GNSS-RTK navigasyon, kimya tesisi güvenliği