Clear Sky Science · tr
Makağın ventral premotor aktivitesine dayanan bir kortikal içi beyin-makine arayüzü
Beyne İmleci Hareket Ettirmeyi Öğretmek
Sadece düşüncelerinizle bir bilgisayar imlecini veya robot kolu yönlendirdiğinizi, kaslarınız artık hareket etmese bile, hayal edin. Beyin–makine arayüzleri (BMA) beyin aktivitesini dış cihazlar için komutlara çevirerek bunu mümkün kılmayı amaçlar. Bugüne dek geliştirilen sistemlerin çoğu beynin tek bir ana hareket alanını kullandı; peki o bölge inme veya ALS gibi durumlarda zarar görürse ne olur? Bu çalışma, genellikle el hareketlerini planlama ve başkalarını izleme ile ilişkilendirilen yakındaki başka bir bölgenin de güvenilir bir şekilde bir BMA’yı çalıştırıp çalıştıramayacağını sorguluyor.
Takıma Yeni Bir Beyin Bölgesi Katılıyor
Klasik BMA’lar çoğunlukla istemli hareketleri doğrudan kontrol eden beyin dokusu şeridi olan birincil motor korteksten ve komşu planlama bölgesi olan dorsal premotor korteksten sinyaller okuyor. Araştırmacılar dikkatlerini farklı bir komşuya çevirdi: ventral premotor korteks, özel olarak F5c adı verilen bir bölge. Maymunlarda F5c, hayvanın hedeflere uzanıp yakaladığı ve hatta bir ekranda eylemleri sadece izlediği zamanlarda ateşlenen hücrelerle doludur. Hareket ve gözlem yanıtlarının bu karışımı, F5c’nin bedenin hareket etmesini gerektirmeden bir imleci veya robot “avatara”yı kontrol etmek için uygun olabileceğini düşündürdü.
Maymunlar, Mikroelektrotlar ve Hareket Eden Hedefler
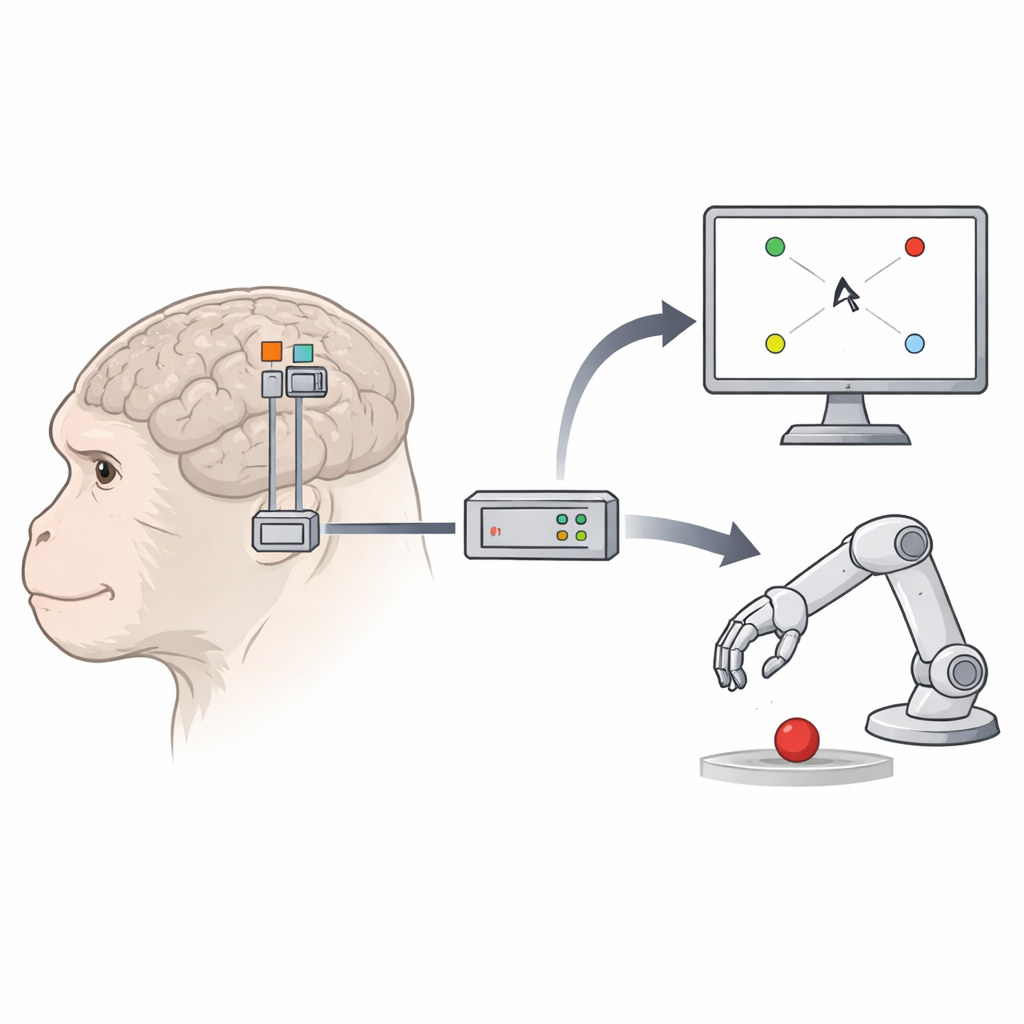
İki makak maymunun üç noktaya—birincil motor korteks, dorsal premotor korteks ve F5c—küçük 96 elektrotlu ızgaralar yerleştirildi. Günlük oturumlarda hayvanlar görsel olarak basit ama davranışsal olarak zorlayıcı birkaç görev gerçekleştirdi. Bir görevde ekranda merkeze dokunup ardından sekiz dış hedeften birine ulaştılar; aynı zamanda ekrandaki küçük bir kare imleç merkezden aynı hedefe hareket etti. İkinci görevde ellerini sabit tutup sadece imlecin hedeflere gitmesini izlediler. Üçüncü, daha gerçekçi düzende imleç 3B robot kol avatarıyla değiştirildi ve sanal bir sahnede hedeflere doğru uzandı. Bu görevler boyunca ekip, her beyin bölgesinin imleç veya avatar hareketlerini ne kadar iyi yönlendirdiğini kıyaslayabildi.
Beyin Sinyalleri Nasıl Akıcı Harekete Dönüştü?
Eğitim aşamasında imleç veya avatar, maymunlar ya hareket ederken ya da izlerken bilgisayar tarafından üretilen, hafif eğimli yolları izledi. Aynı zamanda elektrotlar hızlı beyin aktivite patlamalarını kaydetti. Araştırmacılar daha sonra bir kod çözücü eğitti—beyin ateşlenme örüntülerini imlecin veya avatarın ekrandaki hızlarına eşleyen bir matematiksel araç. Yalnızca en bilgilendirici kanalları yakalamak için, aktivitesi hareket yönü ve hızını izleyen elektrotları seçtiler. Davranışla en yakın ilişkili beyin örüntülerini izole eden bir yöntem kullandılar ve bunu daha karmaşık nöral aktivite ile hareket arasındaki ilişkileri yakalayabilmek için doğrusal olmayan bir adımla güçlendirdiler. Kod çözme aşamasında bilgisayar imleci veya avatarı artık sürmedi; bunun yerine kod çözücü, her 50 milisaniyede bir güncellenen canlı beyin sinyallerini kullanarak ekrandaki hareketi yönlendirdi. Kod çözücü, sinirsel yanıtlar zaman içinde kaydıkça uyum sağlayabilmesi için arka planda periyodik olarak yeniden eğitildi.

“Yeni” Bölge Ne Kadar İyi Performans Gösterdi?
Ana soru, F5c’nin geleneksel kontrol bölgelerinin performansına eşit veya ona yakın olup olamayacağıydı. Her iki maymunda da F5c’ye dayalı kod çözme, özellikle hayvanlar sadece izlerken ve kendi ellerini hareket ettirmediklerinde, başlangıçta imleci hareket ettirmede geride kaldı. Ancak oturumlar ilerledikçe—ve daha fazla elektrot güvenilir hareketle ilişkili sinyaller sağladıkça—F5c yetişti. Birkaç koşulda performansı birincil motor kortekse eşitlendi ve pasif imleç kontrolünde daha sonraki oturumlarda hatta onu aştı. Robot avatarı kontrol ederken, tüm bölgeler arasında genel başarı daha düşüktü, ancak F5c yine de anlamlı bir kontrol sağladı; özellikle avatarı hedefe doğru hafifçe yönlendiren yardımcı bir algoritma ile birleştirildiğinde. Önemli olarak, üç bölgedeki nöronlar hem bilgisayar kontrollü eğitim aşamasında hem de aktif kontrol aşamasında benzer yönsel ayarlama ve popülasyon aktivitesi örüntüleri gösterdi; yalnızca bir alt küme maymunlar BMA’yı kullanmayı öğrenirken tercih edilen yönlerini değiştirdi.
Gelecek Nöroteknolojisi İçin Anlamı Nedir?
Uzman olmayan biri için en önemli alınacak ders, ventral premotor alan F5c’nin—çoğunlukla eylem planlayıcısı ve gözlemcisi olarak düşünüldüğü halde—aynı zamanda beyin–makine arayüzleri için pratik bir kontrol merkezi olarak da hizmet edebileceğidir. Yeterli hareketle ilişkili sinyal olduğunda, F5c aktivitesi üzerine eğitilmiş kod çözücüler ekran imlecini veya destekleyici bir robotu klasik hareket alanına dayananlardan neredeyse aynı derecede yönlendirebilir. Bu, gelecekteki klinik BMA’ların tek bir kortikal bölgeye bağımlı olmak zorunda olmayabileceğini gösteriyor. Birincil motor korteksi hasar görmüş kişiler için ventral premotor korteks gibi yakın planlama bölgeleri, dijital araçlar, protez cihazlar veya hareketlilik yardımcıları üzerinde kontrolü yeniden kazanmaya alternatif bir yol sağlayabilir.
Atıf: De Schrijver, S., Garcia Ramirez, J., Iregui, S. et al. An intracortical brain-machine interface based on macaque ventral premotor activity. Sci Rep 16, 8407 (2026). https://doi.org/10.1038/s41598-026-38536-1
Anahtar kelimeler: beyin-makine arayüzü, motor korteks, premotor korteks, nöral kod çözme, protezik kontrol