Clear Sky Science · tr
Doğrusal Olmayan Sistemlerde Öngörücü Sensör ve Aktüatör Arıza Tespiti, Telafisi ve Kontrolü için Sanal-Yapı Tabanlı Tip-3 Bulanık Sistem
Parçalar Bozulduğunda Makineleri Yoldan Çıkarmamak
Fabrika katlarındaki robot kollarından asitliği düzenleyen kimyasal tesislere kadar modern teknolojiler, her şeyi sessizce çalıştıran sensörlere ve aktüatörlere dayanır. Ancak bu parçalar sürüklenme, takılma veya arıza gösterdiğinde, sistem kimse fark etmeden çok önce güvensiz hale gelebilir. Bu makale, mühendislerin sistemin içindeki davranışı kesin bir matematiksel modellemedikleri durumlarda bile makinelerin bu tür sorunları kendi başlarına algılayıp düzeltebilmesini sağlayan yeni bir yöntemi tanıtıyor.
Gizli Sorunları Yakalamayı Bu Kadar Zorlaştıran Nedenler
Gerçek dünyada birçok ortamda bir sistemin davranışı güçlü biçimde doğrusal olmayan olabilir: girdideki küçük değişimler çıktıda büyük, beklenmedik dalgalanmalara yol açabilir. Geleneksel kontrol yöntemleri, tasarımcıların bu davranışı belirleyen denklemleri bildiğini ve sensörlerle aktüatörlerin çoğunlukla beklendiği gibi çalıştığını varsayar. Oysa uygulamada bileşenler yaşlanır, gürültülü hale gelir veya biraz farklı donanımlarla değiştirilir. Konvansiyonel hata toleranslı kontrolörler ya sabit güvenlik payları gömerek (pasif yöntemler) ya da arızaları tespit edip karşılamak için doğru modellere dayanarak (aktif yöntemler) çalışır. Her iki yaklaşım da sistem zamanla değiştiğinde veya iç işleyişi tam bilinmediğinde zorlanır. Yazarlar, endüstrinin canlı veriden öğrenen, sensör veya aktüatörlerin yanlış davrandığını tanıyan ve sistemin ayrıntılı bir planına ihtiyaç duymadan bu arızaları gerçek zamanlı düzelten kontrolörlere ihtiyaç duyduğunu savunuyor.
Sistemi Kara Kutu Gibi Ele Alan Öğrenen Bir Kontrolör
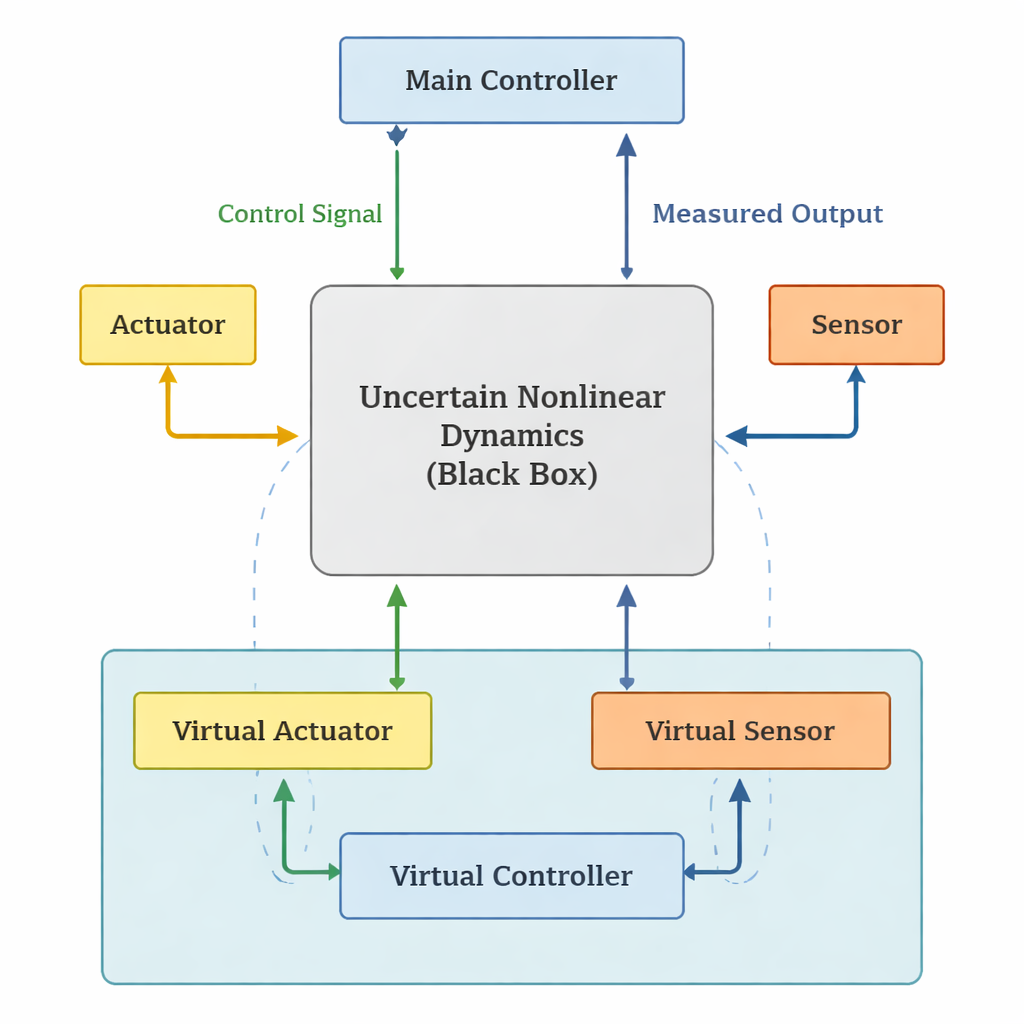
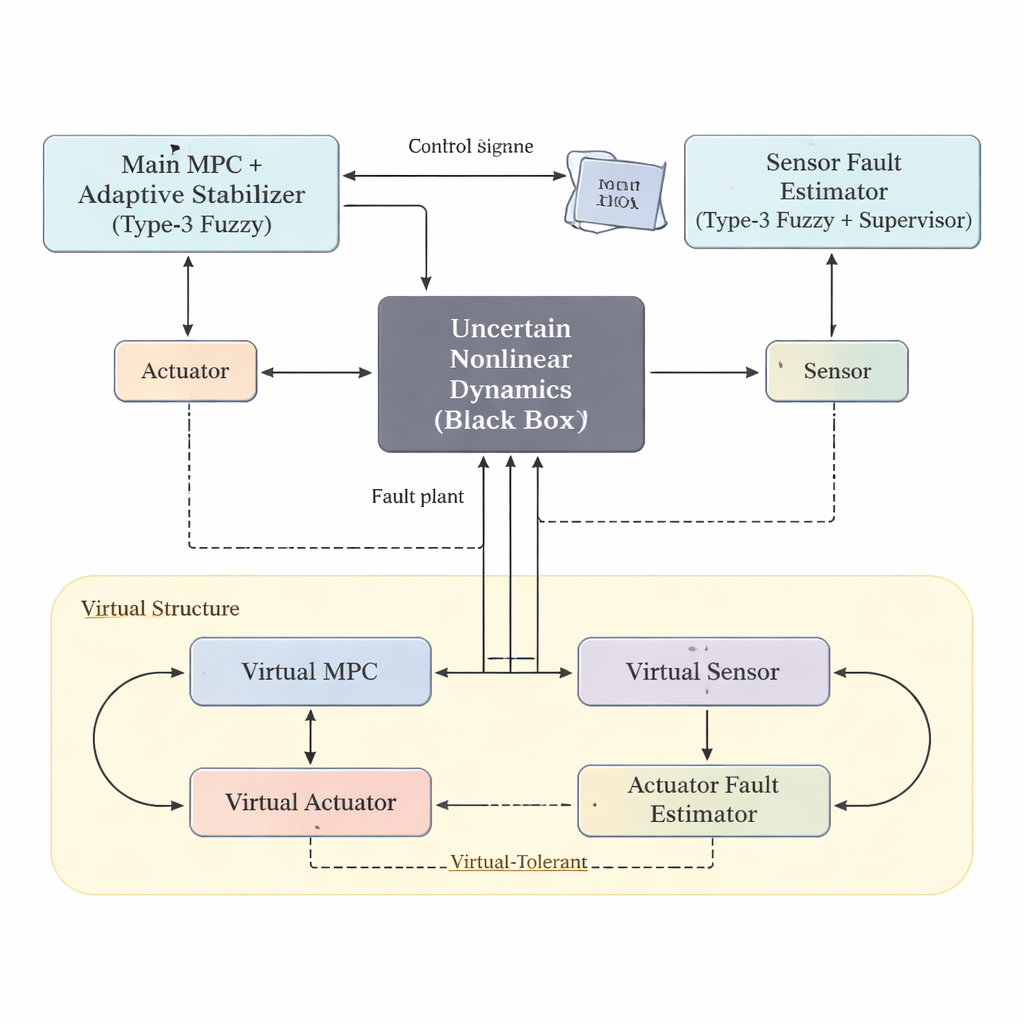
Önerilen çerçeve, tesisi tamamen kara kutu olarak görüyor: yalnızca gönderilen kontrol sinyallerini ve sensörlerle ölçülen çıktıları görür. Özünde, güçlü belirsizlik ve ölçüm gürültüsüyle başa çıkmak için tasarlanmış gelişmiş bir bulanık modelleme biçimi olan tip-3 bulanık mantık sistemi bulunur. Bu bulanık sistem bilinmeyen dinamiklerin kompakt bir giriş–çıkış tanımını çevrimiçi olarak öğrenirken, bir model öngörülü kontrolör (MPC) öğrenilen modeli kısa bir ufuk üzerinde gelecekteki kontrol hamlelerini planlamak için kullanır. Paralel çalışan uyarlanabilir bir kararlılık birimi, model kusurlu olsa da veya parametreler sürüklense bile birleşik geri beslemenin izleme hatalarını sınırlandırıp sonunda sıfıra doğru yönelmesini sağlar.
Gözetleyenleri İzlemek: Sensör ve Aktüatör Arıza Tespiti
Çerçeve, arıza yönetimini iki koordineli parçaya ayırır. Önce, bir sensör-arızası birimi, iki ek tip-3 bulanık kestirici ve bir denetleyici blok kullanarak bir sensör okumasının beklenen kararlı durum değerinden ne kadar sapmış olduğunu çıkarır. Bundan bir düzeltici sinyal üreterek hatalı ölçümü etkili biçimde “geri yaylar”, böylece ana kontrolör güvenilir bir çıktı görmeye devam eder. İkincisi, yöntem gerçek sistemi yansıtan bir sanal yapı kurar: bir sanal sensör, bir sanal aktüatör, kendi bulanık tanımlayıcısı ve bir sanal MPC içerir. Sanal döngü gerçek aktüatörün bozulmasından muzdarip olmadığından, sanal ve gerçek kontrol yolları arasındaki farklar gerçek aktüatörün ne kadar kötüleştiğini ortaya çıkarır. Basit bir formül bu farkı tahmini bir arıza seviyesine dönüştürür ve ana kontrol sinyalinde telafi edilir.
Kararlılığı Kanıtlamak ve Robotlar ile Kimyasal Tanklarda Test Etmek
Yaklaşımın yalnızca sezgisel olmadığını, matematiksel olarak sağlam olduğunu göstermek için yazarlar izleme hatalarını, modelleme hatalarını ve ayarlanabilir bulanık parametreleri içeren bir Lyapunov fonksiyonu—bir tür enerji ölçüsü—kurarlar. Uyarlayıcı terimler için bu enerjinin her zaman azalmasını sağlayacak güncelleme yasalarını türetirler; böylece bozucu etkilere ve arızalara rağmen hataların zamanla küçüldüğünü gösterirler. Simülasyonlar daha sonra yöntemi iki çok farklı örnekte test eder: tek bağlantılı bir robot kolu ve kimyasal bir tankta pH-nötrleştirme süreci. Her iki durumda da gerçek dinamikler tamamen bilinmeyen olarak ele alınır, parametreler değişir ve hem sensör hem de aktüatör arızaları işletme sırasında enjekte edilir. Kontrolör doğru takibi sürdürür, arızanın boyutunu hızla öğrenir ve risk ile hata ölçülerini düşük tutar; daha basit bulanık kontrolörlerin ve literatürdeki diğer gelişmiş hata toleranslı şemaların önüne geçer.
Gerçek Sistemler İçin Bunun Anlamı
Uzman olmayanlar için ana mesaj şudur: bu yöntem karmaşık sistemlere bir tür yerleşik öz-farkındalık kazandırır. Mükemmel bir modele veya mühendislerin elle yeniden ayarına dayanmak yerine, kontrolör gördüğü verilerden sürekli öğrenir, sensörlerin veya aktüatörlerin yanıltmaya veya zayıflamaya başladığını fark eder ve performansı stabil tutmak için hareketlerini otomatik olarak düzelir. Yalnızca giriş ve çıkış verilerine ihtiyaç duyduğundan, ilke olarak birçok farklı makineye her şeyi baştan yeniden tasarlamadan uygulanabilir. Sonuçlar simülasyonlara dayansa da ve donanım düzeyindeki konuların hâlâ incelenmesi gerekse de, çalışma bileşenleri ve çevreleri idealin çok uzağında olduğunda bile daha dayanıklı robotlara, endüstriyel süreçlere ve diğer otonom sistemlere doğru bir yön gösteriyor.
Atıf: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
Anahtar kelimeler: hata toleranslı kontrol, bulanık mantık, model öngörülü kontrol, sensör ve aktüatör arızaları, doğrusal olmayan sistemler