Clear Sky Science · tr
MDI‑YOLO: küçük nesne tespiti için hafif bir transformer‑CNN tabanlı çok boyutlu özellik füzyon modeli
Gökyüzünde Daha Keskin Gözler
Trafik izleme ile afet müdahalesi arasında, dronlar ve uydular dünyamızı giderek daha fazla gözetliyor. Buna karşın bu görüntülerde en çok önemsediğimiz şeyler—minik arabalar, insanlar, tekneler ve uçaklar—çoğu zaman sadece birkaç piksel olarak görünür. MDI‑YOLO üzerine yazılan makale basit ama kritik bir soruyla ilgileniyor: bilgisayarlar bu küçük nesneleri, hatta dronların kendisinin taşıdığı düşük güçlü cihazlarda bile, gerçek zamanlı olarak nasıl güvenilir şekilde tespit edebilir?
Küçük Nesneleri Neden Bulmak Zordur
Hava ve uydu görüntülerinde ilgi çekici nesneler genellikle çok küçüktür, sıkışık halde bulunur ve binalar, ağaçlar veya gölgelerle kısmen örtülü olabilir. Standart tespit sistemleri bir takasla karşılaşır: hafif modeller uç birimlerdeki (ör. dron üzeri bilgisayarlar) cihazlarda hızlı çalışır ama birçok küçük hedefi kaçırır; daha ağır ve doğruluğu yüksek modeller ise sahada kullanışlı olmayacak kadar yavaş ve kaynak tüketicidir. Küçük nesneler ayrıca karmaşık arka planlara karışma eğilimindedir—örneğin gri yollardaki gri arabalar—bu yüzden ayırt edici özellikleri görüntüler sıkıştırılıp derin ağlar tarafından işlendiğinde kolayca kaybolabilir.
Global ve Lokal Görüşün Yeni Bir Karışımı
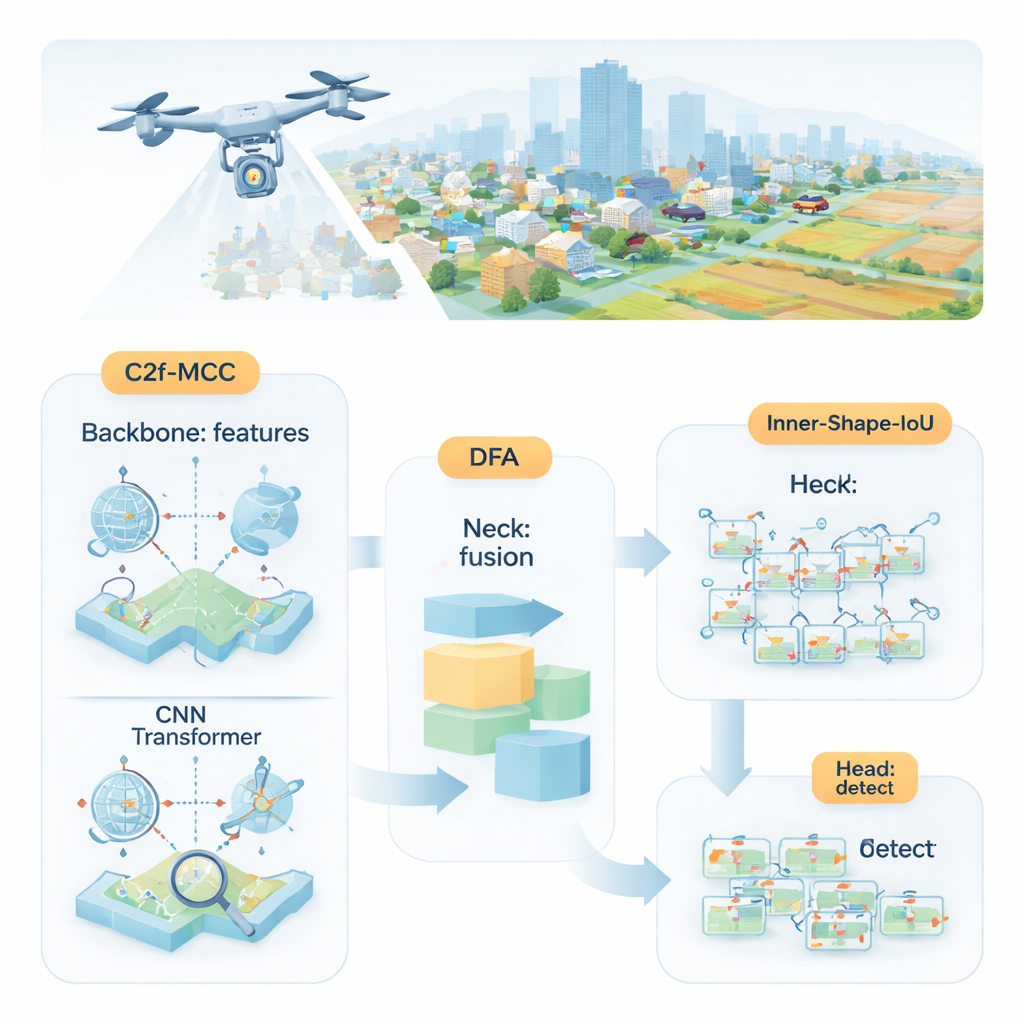
Araştırmacılar, popüler YOLOv8 dedektörünün modelin kompakt kalmasını sağlarken minik hedefleri bulma yeteneğini artıran yeniden tasarlanmış bir sürümü olan MDI‑YOLO’yu öneriyor. Temelinde C2f‑MCC adında yeni bir yapı taşı bulunuyor; bu blok ağ boyunca akan görsel bilgiyi iki yola ayırıyor. Bir yol, tüm görüntü boyunca uzun menzilli ilişkileri yakalamada iyi olan Transformer‑stil işlemeden yararlanıyor—örneğin bir piksel kümesinin daha geniş bir yol veya pist içinde nasıl uyduğunu anlamak gibi. Diğer yol ise kenarlar ve dokular gibi yerel detayları yakalamada güçlü olan klasik konvolüsyonel filtrelerde kalıyor. Kanal gruplandırması yapıp verinin yalnızca bir kısmını daha ağır olan Transformer yolundan geçirerek model, boyutunu veya hızını fırlatmadan küresel farkındalık kazanıyor.
Ağın Önemli Olanlara Odaklanmasına Yardımcı Olmak
Daha iyi yapı taşlarına rağmen ağın nereye dikkat edeceğine karar vermesi gerekiyor. Bunu yönlendirmek için yazarlar Yönsel Füzyon Dikkati (Directional Fusion Attention, DFA) adını verdikleri bir mekanizma tanıtıyor. Bu modül görüntünün genişlik ve yükseklik boyunca desenlere ve ayrıca sahnenin genel bir özetine bakarak farklı bölgeleri ve özellik kanallarını nasıl ağırlıklandıracağını öğreniyor. Uygulamada DFA modelin olası nesne alanlarına—örneğin yollarda araç biçimli lekeler—odaklanmasını ve tekrarlayan ya da kafa karıştırıcı arka plan dokularını göz ardı etmesini teşvik ediyor. Bu birleşik mekansal ve kanal bazlı odak, küçük hedefleri karmaşık çevrelerden veya benzer görünen arka plan bölgelerinden ayırmayı kolaylaştırıyor.
Minik Hedeflerin Etrafında Daha Sıkı Kutular Çizmek
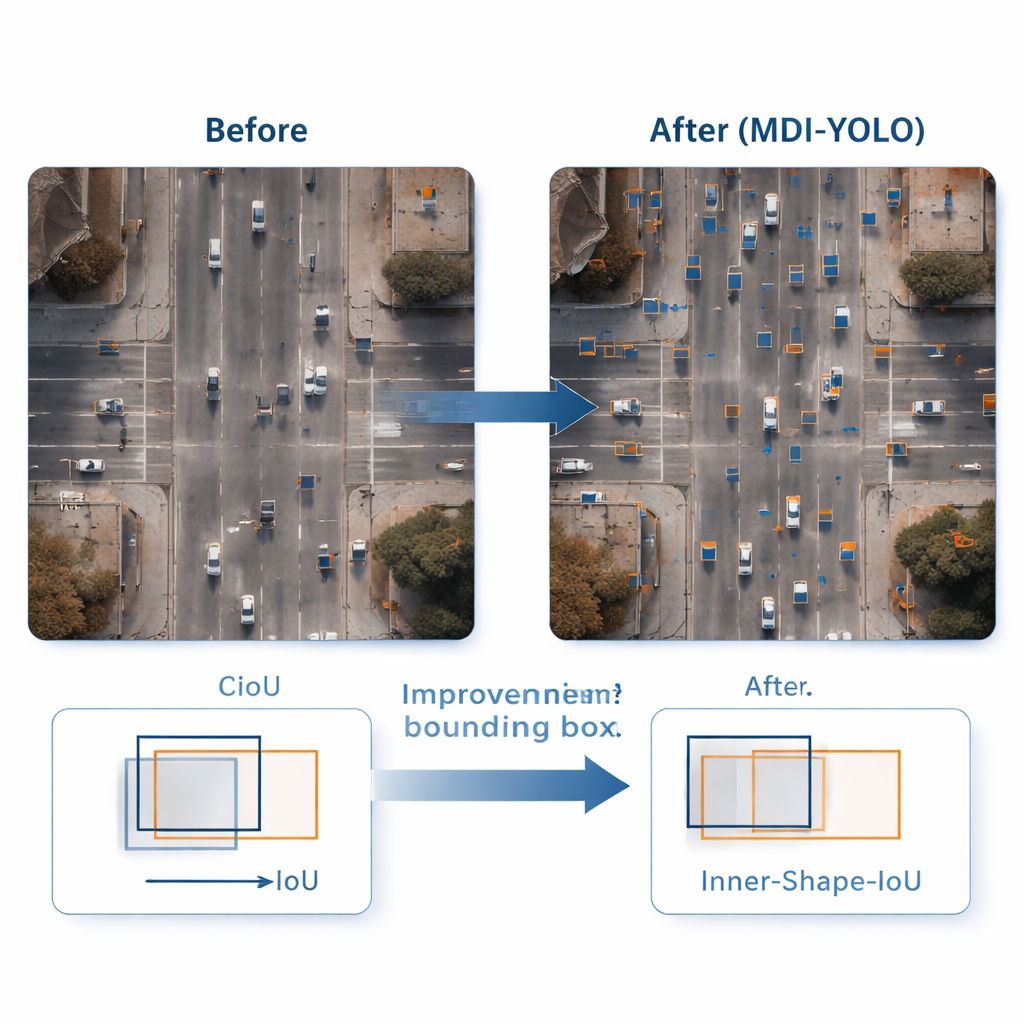
Bir nesneyi görmek işin yalnızca yarısıdır; dedektör aynı zamanda onu doğru şekilde çerçevelendirmelidir. Standart eğitim yöntemleri tahmin edilen dikdörtgenleri gerçek olanlarla "örtüşme" skoru kullanarak karşılaştırır, ancak bu küçük veya garip şekilli nesneler için hassas olmayabilir. Yazarlar Inner‑Shape‑IoU adında yeni bir kayıp fonksiyonu tasarlıyor; bu fonksiyon kutuları yalnızca ne kadar örtüştüklerine göre değil, şekillerinin, boyutlarının ve merkez bölgelerinin gerçek nesneyle ne kadar uyumlu olduğuna göre de değerlendiriyor. İki tamamlayıcı ölçüyü birleştirerek sadece kenarları eşleşen ama hedefin özünü kaçıran kutuları cezalandırıyor; bu da özellikle küçük, sıkışık veya uzamış nesneler için daha hassas sınırlar sağlıyor.
Ek Ağırlık Getirmeden Kanıtlanmış Kazanımlar
MDI‑YOLO’yu test etmek için ekip iki zorlu halka açık kıyas seti üzerinde deneyler yürüttü: şehirler ve trafik görüntüleri içeren VisDrone2019 ve birçok küçük, yoğun şekilde paketlenmiş nesne içeren geniş hava sahneleri koleksiyonu DOTAv1.0. Önceden eğitilmiş modellere dayanmayarak, MDI‑YOLO temel YOLOv8’e kıyasla standart doğruluk puanlarını birkaç yüzde puanı artırdı; parametre sayısını neredeyse değiştirmeden ve hızlı çıkarım sürelerini koruyarak. Hafif YOLO varyantlarından daha ağır Transformer‑tabanlı sistemlere kadar geniş bir popülasyona kıyasla nadir görülen bir kombinasyon sundu: yüksek doğruluk, düşük hesaplama maliyeti ve farklı sahnelerde sağlamlık.
Gerçek Dünya Kullanımı İçin Anlamı
Uzman olmayanlar için çıkarılacak sonuç şudur: MDI‑YOLO, dronlar ve uzaktan algılama sistemlerine büyük, enerji tüketen bilgisayarlara ihtiyaç duymadan daha keskin, daha güvenilir "gözler" sağlıyor. Küresel bağlamı, yerel detayları, hedefe yönelik dikkati ve sınır kutularını eğitmenin daha seçici bir yolunu akıllıca harmanlayarak; yöntem güvenlik, izleme ve haritalama için önemli olan minik nesneleri tespit etmeyi kolaylaştırıyor. Bu tür verimli, yüksek hassasiyetli görme, otonom çalışabilen, hızlı yanıt verebilen ve gerçek dünyada yaygın şekilde konuşlandırılabilecek daha akıllı hava platformlarına doğru atılmış önemli bir adımdır.
Atıf: Shi, H., Wu, Y., Xu, Y. et al. MDI-YOLO a lightweight transformer-CNN-based multidimensional feature fusion model for small object detection. Sci Rep 16, 7233 (2026). https://doi.org/10.1038/s41598-026-38378-x
Anahtar kelimeler: drone görüntüleme, küçük nesne tespiti, uzaktan algılama, YOLO, bilgisayarla görme