Clear Sky Science · tr
Denizaltı Ortamında Deniz Çöpü Tespiti için Geliştirilmiş Bir YOLOv11 Ağı
Denizaltı çöplerini tespit etmenin önemi
Okyanusun yüzeyinin çok altında plastik poşetler, şişeler, olta misinaları ve diğer atıklar sessizce birikir. Bu çöpler deniz yaşamına zarar verir, hassas habitatları tıkar ve bilim insanlarının denizi incelemek ve korumak için kullandığı denizaltı robotlarının çalışmasını bile engelleyebilir. Burada özetlenen makale, bulanık ve karmaşık sularda bile kameraların ve robotların gerçek zamanlı olarak denizaltı çöplerini otomatik şekilde bulup etiketlemesine yardımcı olan daha akıllı bir bilgisayar görüsü sistemi tanımlıyor.
Deniz altında net görmek neden zor
Karadaki açık gündüz fotoğraflarının aksine, denizaltı görüntüleri genellikle karanlık, puslu ve mavi ya da yeşil tonludur. Işık derinlikle hızla kaybolur, kum ve plankton suyu bulanıklaştırır, ve çöp nesneleri çoğunlukla küçük, kısmen gizlenmiş veya taş ve bitkilere benzer görünebilir. Geleneksel görüntü işleme yöntemleri bu koşullarda zorlanır ve modern derin öğrenme algılayıcıları bile küçük nesneleri kaçırabilir veya arka plan dokusunu çöp sanabilir. Oysa doğru ve hızlı tespit, kirliliğin haritalanması, temizlik robotlarının yönlendirilmesi ve deniz çöplerinin zaman içindeki değişiminin izlenmesi için hayati öneme sahiptir.
Hızlı bir görüş iş atlısı üzerine inşa etmek
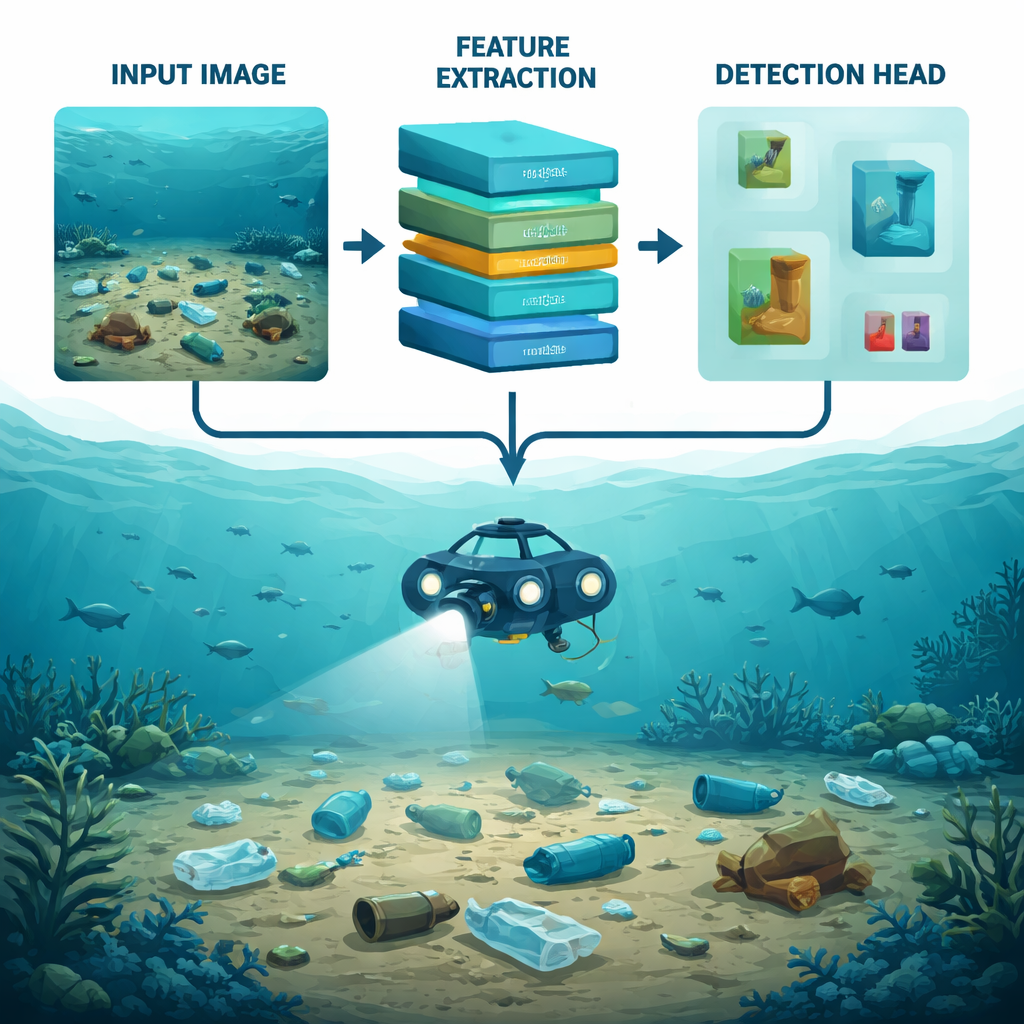
Yazarlar, “You Only Look Once” (Sadece Bir Kez Bakarsın) ailesinin yeni bir üyesi olan YOLOv11 üzerine çalışıyor. YOLO modelleri, bir görüntüyü bir kez tarayıp gerçek zamanlı olarak birçok nesnenin konumunu ve türünü tahmin ettikleri için popülerdir. Ancak standart YOLOv11 tasarımı sokaklar veya iç mekan fotoğrafları gibi daha tipik sahneler için oluşturulmuş, görsel olarak zorlu denizaltı dünyası için değil. Bu boşluğu kapatmak amacıyla araştırmacılar ağın iki ana bölümünü yeniden tasarlıyor: görüntüden ilk görsel desenlerin nasıl çıkarıldığı ve daha sonra hangi parçaların önemli çöp nesneleri olduğu ile hangi parçaların sadece gürültülü arka plan olduğu kararının nasıl verildiği.
Çeşitli boyutlardaki detayları ayırt etmenin yeni yolu
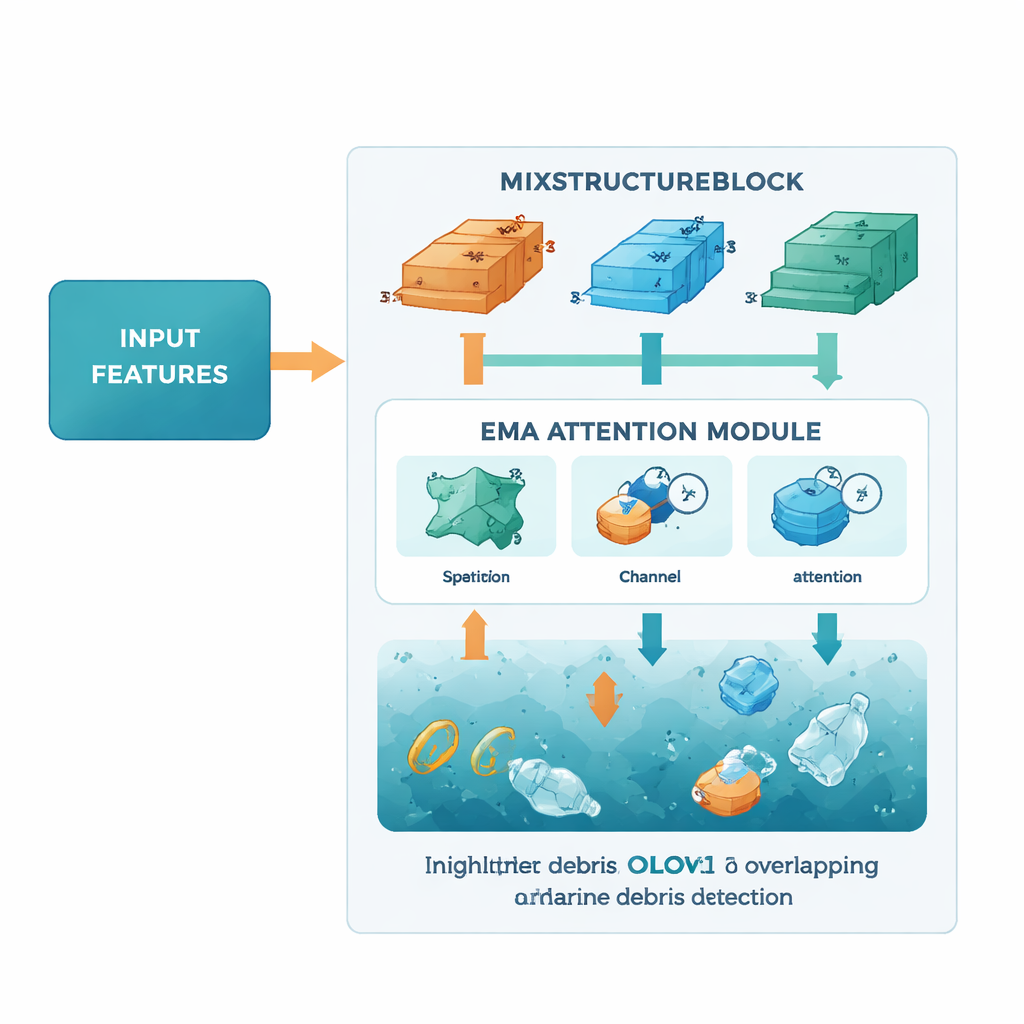
İlk iyileştirme, YOLOv11 omurgasındaki standart bir yapı bloğunun yerini alan MixStructureBlock adlı bir modüldür. Tek bir sabit filtre düzeni kullanmak yerine, MixStructureBlock sahneye farklı “pencere boyutları” ve aralıklarla bakan birkaç paralel dalganın çalıştırılmasını sağlar. Bu, ağın bir şişe kapağının kenarı gibi ince detayları ve sürüklenen bir poşet gibi daha büyük şekilleri fark etmesine yardımcı olur. Buna ek olarak, blok bilgilendirici renkleri ve konumları vurgulamayı, faydasız arka plan yamalarını ise küçümsemeyi öğrenen basit dikkat mekanizmaları içerir. Sonuç, küçük ve sönük çöp parçalarını tespit etmeyi kolaylaştıran daha zengin ve temiz bir özellik setidir.
Ağın nereye odaklanacağını öğretmek
İkinci yükseltme, tespitlerin yapıldığı ağın ilerleyen bölümüne eklenen Efficient Multi-scale Attention (EMA) modülüdür. EMA, özellik haritalarına hem mekân boyunca hem de kanal bazında bakarak etkili bir şekilde iki soruyu aynı anda sorar: “Görüntünün neresinde önemli bir şey oluyor?” ve “Hangi tür desenler şu anda en alakalı?” Çoklu ölçeklerde bilgi havuzlayarak ve hafif matematiksel işlemler kullanarak, EMA çakışan nesneler veya kameradan uzak sönük öğeler gibi muhtemel çöp bölgelerine ağın odaklanmasını keskinleştirir; aynı zamanda genel modeli gömülü donanımda gerçek zamanlı kullanım için kompakt ve hızlı tutar.
Sistemi teste sokmak
Tasarımı değerlendirmek için ekip modeli Japonya’da toplanmış büyük bir derin deniz görüntüleri koleksiyonu olan TrashCan üzerinde eğitip değerlendirdi. Veri setinin bir versiyonu çöpleri belirli nesne türüne göre (örneğin bardak, poşet veya metal boru) etiketlerken, diğer versiyon öğeleri materyale göre (örneğin plastik veya kumaş) gruplayıyor. Her iki versiyonda da geliştirilmiş ağ, orijinal YOLOv11, önceki deniz çöpü sistemleri ve diğer denizaltı odaklı YOLO varyantları dahil olmak üzere birkaç güçlü temel yöntemi geride bırakıyor. Sadece daha fazla doğru çöp tespiti yapmakla kalmıyor, özellikle küçük ve kalabalık öğeleri daha iyi algılıyor; ayrıca yaklaşık 5 megabayt gibi dikkat çekici derecede küçük bir model boyutuyla çalışıyor ki bu, güç kısıtlı denizaltı araçları için çok uygun.
Daha temiz okyanuslar için ne anlama geliyor
Basitçe söylemek gerekirse, çalışma bir yapay zekânın denizaltı görüntülerine nasıl “baktığını” dikkatle yeniden düşünmenin dalgaların altındaki çöpü bulmada gerçek bir fark yaratabileceğini gösteriyor. Çok ölçekli desen çıkarımı ile önemli bölgelere akıllı dikkat mekanizmalarını birleştirerek, önerilen sistem daha fazla çöp tespit ediyor ve gerçek zamanlı kullanım için yeterince verimli kalıyor. Kamera sistemlerine ve denizaltı robotlarına konuşlandırıldığında, bu tür teknoloji bilim insanlarının ve çevre ajanslarının kirlilik sıcak noktalarını haritalamasına, temizlik çabalarını yönlendirmesine ve deniz çöplerini azaltmaya yönelik politikaların işe yarayıp yaramadığını izlemesine yardımcı olabilir — bizi daha sağlıklı okyanuslara bir adım daha yaklaştırır.
Atıf: Yuanwei, J., Yijiang, D., Xuemei, W. et al. An improved YOLOv11 network for marine debris detection in underwater environment. Sci Rep 16, 7074 (2026). https://doi.org/10.1038/s41598-026-38305-0
Anahtar kelimeler: deniz çöpü tespiti, denizaltı robotikleri, nesne tespiti, derin öğrenme, okyanus kirliliği