Clear Sky Science · tr
Karmaşık lojistikte paket ayırmada konumlandırma yöntemi üzerine araştırma
Neden Daha Akıllı Paket Ayırma Önemli
Verdiğiniz her çevrimiçi sipariş, devasa lojistik merkezlerinde kutuların görünmez bir balesini başlatır. Bir paket kapınıza doğru hızlanmadan önce, genellikle karışık paket yığınlarından bulunmalı, alınmalı, ölçülmeli, taranmalı ve yönlendirilmelidir. Bugün bu ilk "kaosu açma" işinin büyük kısmı hâlâ tekrarlayıcı ve yorucu işleri yapan insan çalışanlara dayanıyor. Bu makale, robotların bir karışıklık içindeki her paketi nereden tutacaklarını güvenilir biçimde bulmalarına yardımcı olan, görsel tabanlı yeni bir yöntemi sunuyor; bu sayede tam otomasyona, daha hızlı ve daha az emek yoğun paket ayırmaya bir adım daha yaklaşılıyor.
Dağınık Yığınlardan Robot Dostu Veriye
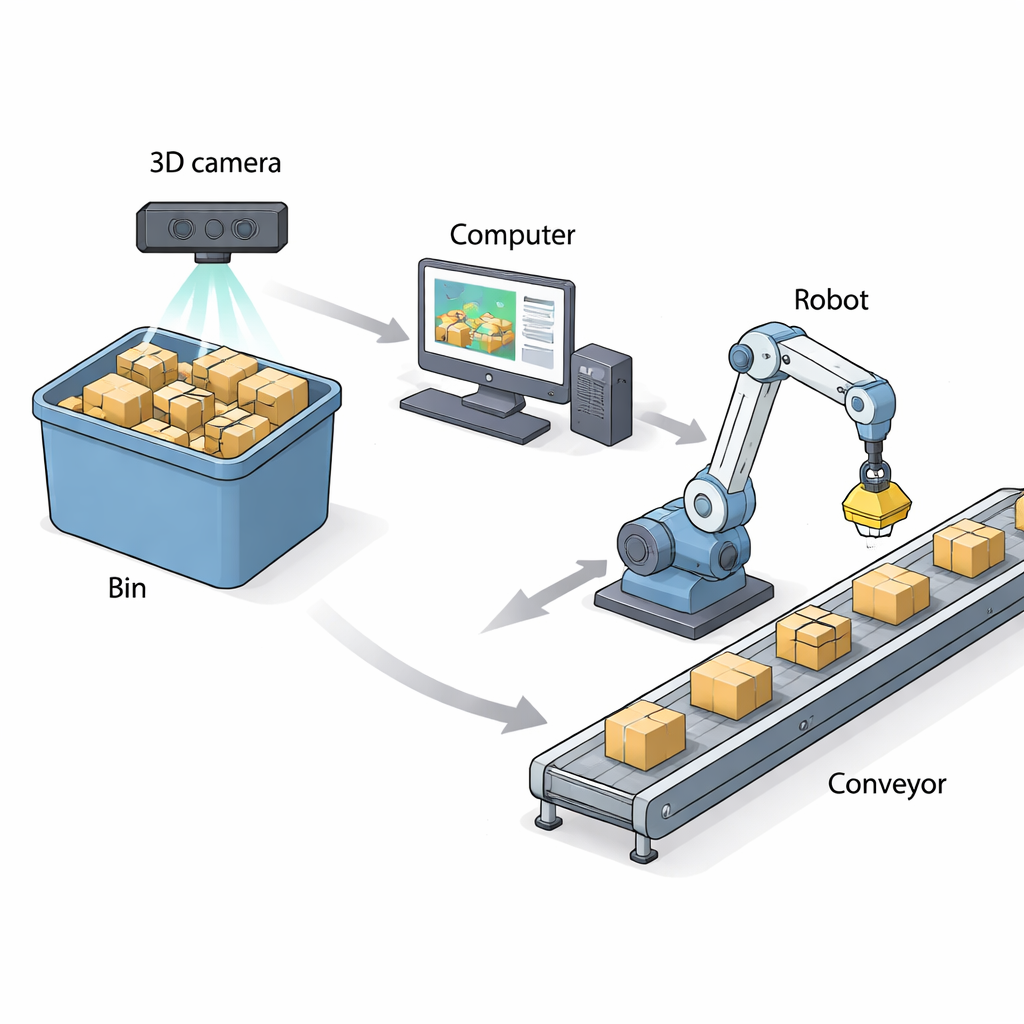
Araştırmacılar, istif içinde rastgele atılmış, bazen üst üste binerken ezilmiş veya eğilmiş günlük kutular ve yumuşak posta zarfı türü "düzensiz" lojistik paketlerine odaklanıyor. Bu dağınık ortamda insan çalışanların yerini almak için robotun önce hedef paketin üst yüzeyinde tam olarak nereye uzanması gerektiğini ve kavrama ucunu nasıl yönlendireceğini bilmesi gerekiyor. Ekip, hem renkli görüntü hem de paketlerin üst katmanının derinlik haritasını yakalayan bir 3B kamera etrafında bir sistem kuruyor. Renkli görüntüde modern bir tanıma ağı (YOLOv8 tabanlı) bireysel paketleri tespit ederken, derinlik haritası bunların üç boyutlu şeklini açığa çıkarıyor. Bu bileşim bilgisayarın bir sonraki tutulacak en iyi paketi seçmesine—çok örtülmemiş ve kutu kenarlarından yeterince uzak olanı—ve ardından hassas bir kavrama noktası hesaplamasına olanak tanıyor.
Üç Nokta ve Bir Gölgeyle Kararlı Kavrama Noktası Bulma
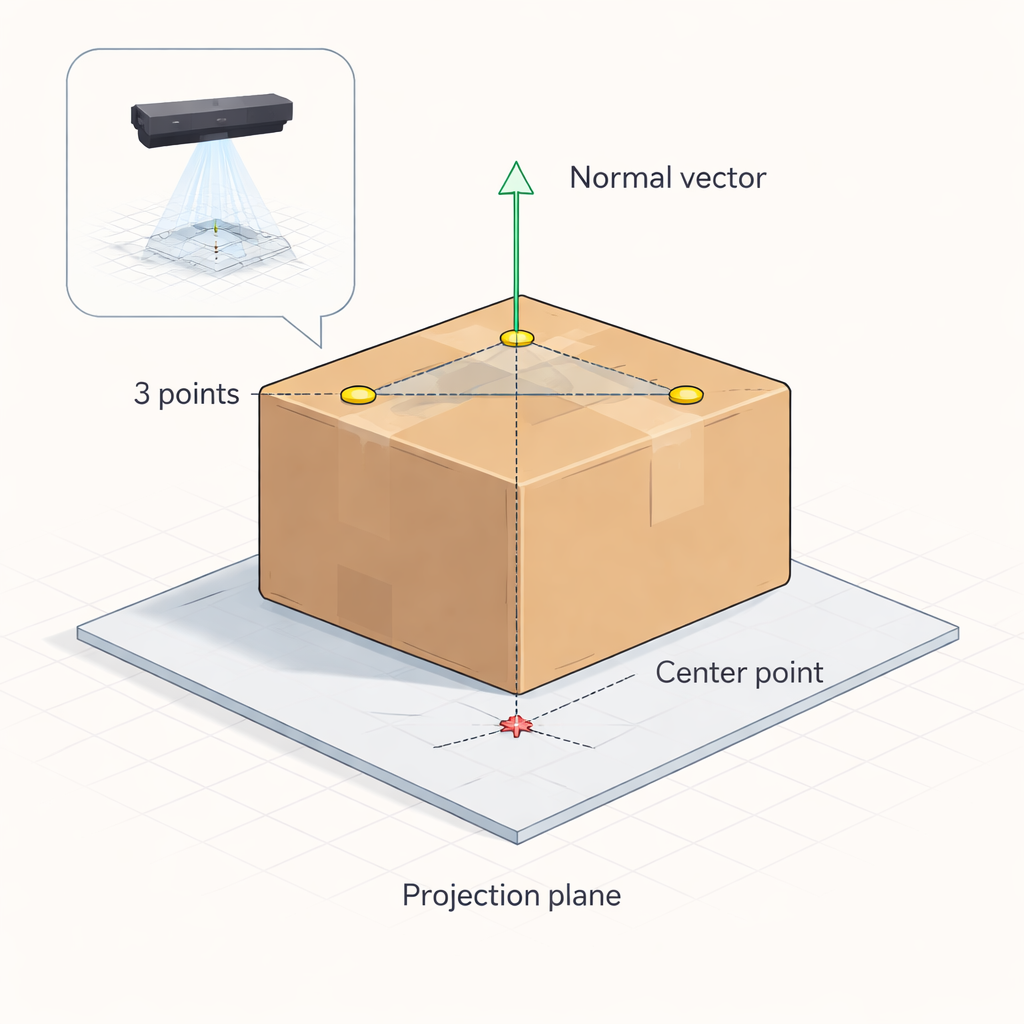
Yöntemin merkezinde, yazarların üç noktalı yönelim–projeksiyon merkezleme algoritması adını verdikleri geometrik bir hile var. Bir hedef paket seçildiğinde sistem, derinlik verilerinden üst yüzeyinden rastgele üç nokta seçer. Bu üç nokta bir düzlemi tanımlar; tıpkı bir masa üstündeki üç çivilin masanın eğimini belirlemesi gibi. Bu düzlemden algoritma, paketin yüzeyine dik olarak çıkan bir "normal" yönünü hesaplar. Eşzamanlı olarak, sistem görüntüdeki paketin dört üst köşesini kullanarak projeksiyon gölgesinin geometrik merkezini çıkarır; bu, bir dikdörtgenin gölgesinin merkezini bulmaya benzer. Düzlemin yönü ile bu merkez pozisyonunun birleştirilmesi, hassas bir 3B kavrama konumu ve paketin üst yüzeyinin eğimini verir; bunlar daha sonra robotun vakum başlığı veya tutucusunu yönlendirebilir.
Ezilmiş ve Şişkin Paketlerle Başa Çıkma
Gerçek paketler kusursuz bloklar değildir: kabarcıklı zarflar sarkar, yumuşak torbalar kabarır ve karton kutular yük altında deformasyona uğrayabilir. Basit bir düz yüzey varsayımı bu durumlarda başarısız olur. Bunu ele almak için yazarlar matematiği üç durumu ayırt edecek şekilde genişletiyor: neredeyse düz paketler, konveks (kabaran) üst yüzler ve konkav (sarkan) yüzeyler. Sistem önce bir paketin yüzeyindeki en yüksek ve en düşük derinlik değerlerini karşılaştırarak önemli ölçüde deforme olup olmadığına karar veriyor. Eğer öyleyse, deforme yüzeyin hayali bir referans düzlemle nasıl kesiştiğini analiz ediyor ve bu kesişime yaklaşık bir elips uyduruyor. Buradan, gerçek üst yüzey sarsa veya kabarsa bile kararlı bir kavrama yüzeyini en iyi temsil eden "optimal" düzlemi çözüyor ve önemli kavrama noktasını tekrar o düzleme projekte ediyor.
Algoritmayı Teste Sokmak
Matematiğin pratikte işe yarayıp yaramadığını kontrol etmek için ekip, altı eksenli bir endüstriyel robot, bir 3B kamera ve özel bir lazer-ve-prob cihazı içeren bir test düzeneği kurdu. Önce, her test paketinin üst yüzeyinin gerçek geometrik merkezini işaretleyip iki lazer ışını kullanarak bu fiziksel konumu uzayda belirlediler. Ardından, görme algoritmalarının aynı merkezin kendi tahminini hesaplamasına izin verip robotu ikinci bir probu hesaplanan noktaya hareket ettirecek şekilde komutlandırdılar. İki prob ucunun arasındaki küçük sapmayı ölçerek konumlandırma hatasını hesaplayabildiler. Hem sert ahşap kutu modelleri hem de oluklu kartonlar, kabarcıklı zarflar ve plastik torbalar gibi gerçekçi ambalaj malzemeleriyle yapılan testler—250×250 mm’ye kadar ebatlarda—maksimum yaklaşık 1,7 milimetre konumlandırma hatası ve eksen başına ortalama hataların yaklaşık 1 milimetre civarında olduğunu gösterdi. Her paket için tam hesaplama yaklaşık 17,5 milisaniye sürdü; bu da yüksek hızlı ayrıştırma hatları için yeterince hızlı.
Geleceğin Depoları İçin Anlamı
Basitçe söylemek gerekirse çalışma, 3B kamera ve bu üç nokta, projeksiyon tabanlı algoritmayla donatılmış bir robotun, dağınık bir kutudan paketleri milimetre düzeyinde hassasiyetle nereden ve nasıl kavrayacağını güvenilir biçimde belirleyebildiğini gösteriyor. Çok yumuşak paketlerdeki güçlü deformasyonlar hâlâ doğruluğu bir miktar düşürse de yöntem gerçekçi depo koşulları için yeterince sağlam kalıyor. Paket hacimleri artmaya ve iş gücü sıkıntıları sürmeye devam ederken, bu tür algoritmalar en ağır ve en tekrarlayıcı ayırma işleri insanlardan makinelere kaydırarak daha güvenli, daha az tekdüze işler sağlayabilir—aynı zamanda büyüyen e‑ticaret dünyasının sorunsuz işlemeye devam etmesine yardımcı olabilir.
Atıf: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
Anahtar kelimeler: 3B görme, paket ayırma, robotik kavrama, lojistik otomasyonu, nesne yerelleştirme