Clear Sky Science · tr
Basitleştirilmiş Swin-T'nin değiştirilmiş EFS-Net ile entegrasyonu: karmaşık sualtı ortamlarında dikkatle yönlendirilen sualtı boru hattı segmentasyonu
Deniz tabanını izlemenin önemi
Dalgaların altında saklı olarak geniş boru ağları modern toplumların ihtiyaç duyduğu petrol, gaz ve enerji kablolarını taşır. Bu sualtı boruları çatlar, korozyona uğrar veya yer değiştirirse, bunun sonucu maliyetli kesintiler ve ciddi kirlilik olabilir. Bugün, denetim işlerinin çoğu sualtı robotlarından gelen aylarca süren bulanık videoları izleyen insan operatörler tarafından yapılır. Bu makale, zor sualtı görüntülerinden boruları otomatik olarak ayırabilen yeni bir yapay zeka (YZ) sistemi sunuyor; sistem, borular loş, “deniz karı” ile bulanmış veya kısmen kumla gömülü olsa bile çalışabiliyor. Güvenilir, otomatik denetime doğru bu adım, açık deniz enerji ve altyapısının daha güvenli ve daha ucuza bakımının yapılmasını sağlayabilir.
Bulanik bir dünyada net görmek
Sualtı görüntüleri bilgisayarlar için bilhassa yorucudur. Işık derinlikle hızla azalır, renkler yeşil ve maviye kayar ve yüzeyde asılı partiküller pus ve kar benzeri taneler oluşturur. Keskin kenarlara ve temiz kontrasta dayanan klasik görüntü işleme teknikleri, boru kumla kaplıysa, bitkilerle örtülü veya sisle bulanıksa başarısız olma eğilimindedir. Derin öğrenme işleri iyileştirdi ve bazı popüler sinir ağları belirli veri kümelerinde boruları tespit edebiliyor. Ancak bu sistemler genellikle tek tip su koşuluna veya kamera düzenine uzmanlaşır. Farklı su, aydınlatma veya arka plana sahip yeni bir ortamla karşılaştıklarında doğrulukları hızla düşer. Temel zorluk, hem doğru hem de uyum sağlayabilen, aynı zamanda gerçek dünya denetim sistemlerinde çalışacak kadar verimli bir model inşa etmektir.
Sualtı görüntülerine iki beyinli yaklaşım
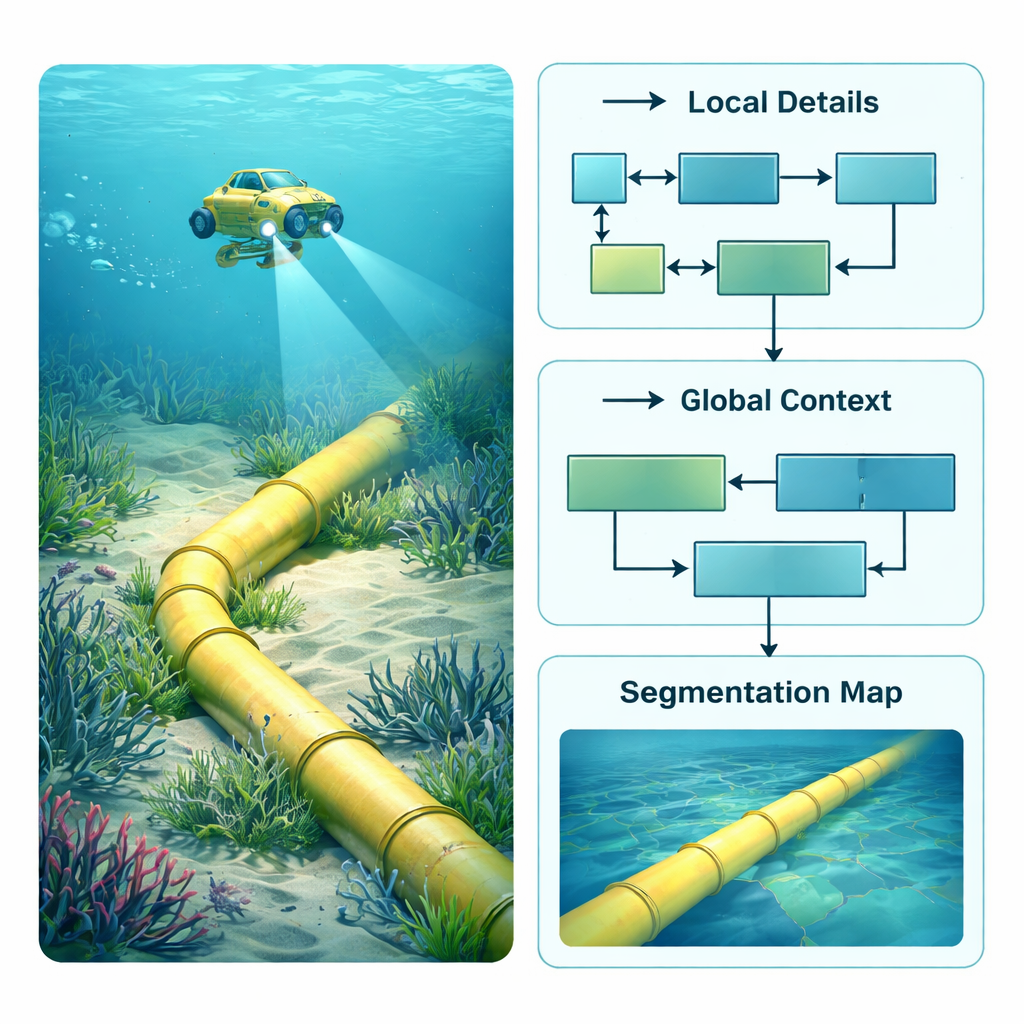
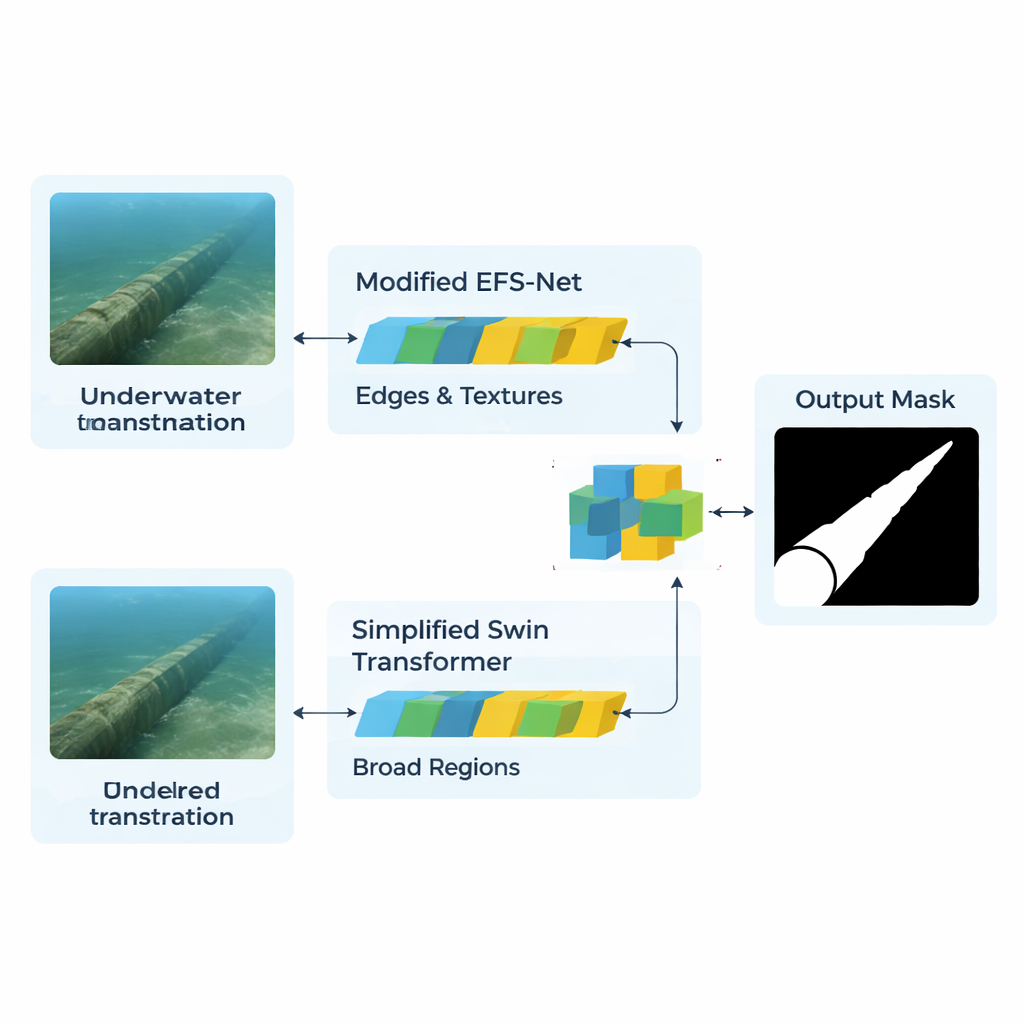
Yazarlar bunu, iki oldukça farklı “görme biçimini” birleştiren hibrit bir YZ mimarisi kurarak ele alıyor. Basitleştirilmiş bir Swin Transformer tabanlı dal, geniş açılı bir gözlemci gibi davranıyor. Çerçevenin tamamını tarayarak borunun deniz tabanı üzerindeki genel güzergâhı gibi büyük ölçekli desenleri anlıyor. EfficientNet omurgasıyla güçlendirilmiş EFS-Net’ten uyarlanmış ikinci dal ise büyüteç gibi çalışıyor. Borunun başladığı yer ile kum veya bitki örtüsünün bittiğini gösteren kenarlar, dokular ve ince yapılar gibi ayrıntılara odaklanıyor. Her iki dal da aynı yeniden boyutlandırılmış görüntüleri işler ve ağın görüntünün her bölgesinde anlamlı yapılar olabileceğini düşündüğünü tanımlayan iç özellik haritalarına dönüştürür.
Dikkatin neyin önemli olduğuna karar vermesine izin vermek
Bu iki dalın çıktılarını basitçe üst üste koymak, tekrarlı bilgilerin karmaşasına yol açardı. Bunun yerine model, piksel piksel hangi ayrıntılara odaklanılacağını belirlemek için bir “dikkat” mekanizması kullanır. Üç başlı çapraz-dikkat modülü, ayrıntılara odaklanan dalın özelliklerini bağlam odaklı dalın özellikleriyle karşılaştırır. Özetle, ayrıntı dalı hedef odaklı sorular sorar — “Bu kenar bir boruya mı ait?” — bağlam dalı ise küresel ipuçları sağlar — “Bu konum ve yöndeki bir çizgi borunun parçası olarak mantıklı mı?” CBAM adı verilen ek bir rafine adım, olası boru bölgelerinin sinyalini daha da güçlendirir ve kayalıklar, algler veya asılı partiküller gibi arka plan gürültüsünü azaltır. Ardından bir kod çözücü ağı, her pikseli boru veya değil olarak işaretleyen tam boyutta bir maske oluşturmak için kademeli olarak yeniden inşa eder.
Sistemi teste sokmak
Bu tasarımın pratikte işe yarayıp yaramadığını değerlendirmek için araştırmacılar HOMOMO adında büyük ve zorlu bir veri seti topladılar. Veri seti, farklı ve sıklıkla zorlayıcı koşullar altında 1,2 kilometrelik boru boyunca çekilmiş 120.000’den fazla gerçek deniz tabanı boru hattı renk görüntüsü içerir: düşük ışık, deniz sisi, yüzen “kar,” kum sapmaları ve yoğun bitki örtüsü. Modeli bu koleksiyonun bir kısmında eğittiler ve ardından UNet, DeepLab, SwinUNet, TransUNet, Mask2Former ve birkaç YOLO nesne algılayıcı sürümü gibi yaygın kullanılan sistemlerle karşılaştırdılar. HOMOMO üzerinde hibrit modelleri, boru pikselini yaklaşık %98 ortalama kesişim-bölüm (intersection-over-union) ile doğru şekilde segmentledi; bu, en iyi rakip yöntemden önemli ölçüde yüksekti. Aynı derecede önemli olarak, model yeniden eğitme yapılmadan iki çok farklı görüntü kaynağında — sentetik bir Roboflow veri seti ve gerçek dünya YouTube görüntüleri — test edildiğinde hâlâ güçlü performans gösterdi; bu da yeni kameralar ve su koşullarıyla başa çıkabildiğini gösteriyor.
Gerçek okyanus için anlamı
Uzman olmayanlar için çıkarım şudur: Bu YZ sistemi, geleneksel yöntemler için çok gürültülü ve tutarsız olan video karelerinde sualtı borularını güvenilir biçimde çizebiliyor. Sahnenin küresel görünümünü kenar ve doku için keskin bir bakışla harmanlayarak ve bu bakış açılarını birleştirmek için dikkati kullanarak model, büyük hesaplama gücü gerektirmeden yüksek doğruluk elde ediyor. Pratikte böyle bir araç, otonom robotların denizaltı altyapısının uzun kesitlerini sürekli izlemesine, olası hasar veya gömülme durumlarını insan incelemesi için işaretlemesine yardımcı olabilir. Çok ince veya tamamen gizlenmiş borularla hâlâ zorlanıyor olsa da yaklaşım, modern enerji ve iletişim ağlarını destekleyen gizli tesisatın daha güvenli, daha otomatik denetimine doğru önemli bir adımı işaret ediyor.
Atıf: Hosseini, N., Mohanna, F. & Moghimi, M.K. Integrating simplified Swin-T with modified EFS-Net for attention-guided underwater pipelines segmentation in complex underwater environments. Sci Rep 16, 6987 (2026). https://doi.org/10.1038/s41598-026-38081-x
Anahtar kelimeler: sualtı boru hatları, görüntü segmentasyonu, derin öğrenme, deniz denetimi, transformer ağları