Clear Sky Science · tr
Etkileşim katsayısı yöntemi ve çift hızlı kontrole dayalı yüksek hızlı rotor dengeleyicisinin tasarımı ve doğrulanması
Dönen makineleri sağlıklı tutmak
Metro trenlerinden fabrika robotlarına kadar modern hayatı çalıştıran birçok makine, dakikada on binlerce kez dönen parçalara dayanır. Bu dönen parçalar hafifçe bile dengesiz olduğunda, sallanma, gürültü, enerji kaybı ve zamanından önce aşınma gibi sorunlar ortaya çıkar. Bu makale, mühendislerin yüksek hızlı elektrik motoru rotorlarındaki bu küçük dengesizlikleri tespit edip düzeltmelerine yardımcı olan yeni bir cihazı anlatıyor; hedef daha sessiz, daha verimli ve daha uzun ömürlü makineler elde etmek.
Günlük teknoloji için dengelemenin önemi
Bir elektrik motorunun içinde rotor dönen parçadır. Kütlesi eşit dağılmamışsa her dönüş küçük bir yana çekme kuvveti üretir; çamaşır makinesindeki kıyafetlerin bir tarafa toplanmasına benzer. Düşük hızlarda etki hafif olabilir, ancak yüksek hızlarda kuvvetler keskin şekilde artar ve yataklara zarar verebilir, parçaları gevşetebilir ve verimi azaltabilir. Elektrikli araçlar, insansız hava araçları ve hassas aletler gibi modern uygulamalar giderek hafif ve yüksek hızlı rotorlar kullanıyor; bunlar dengesizliğe karşı özellikle hassastır. Yazarlar sabit mıknatıslı doğru akım (DC) motorlarına odaklanıyor ve yaklaşık 10.000 devir/dakika hızlara güvenli ve doğru çalışabilecek bir dengeleyici geliştirmeyi amaçlıyor.
Dönen parçaları ayarlamak için yeni bir araç
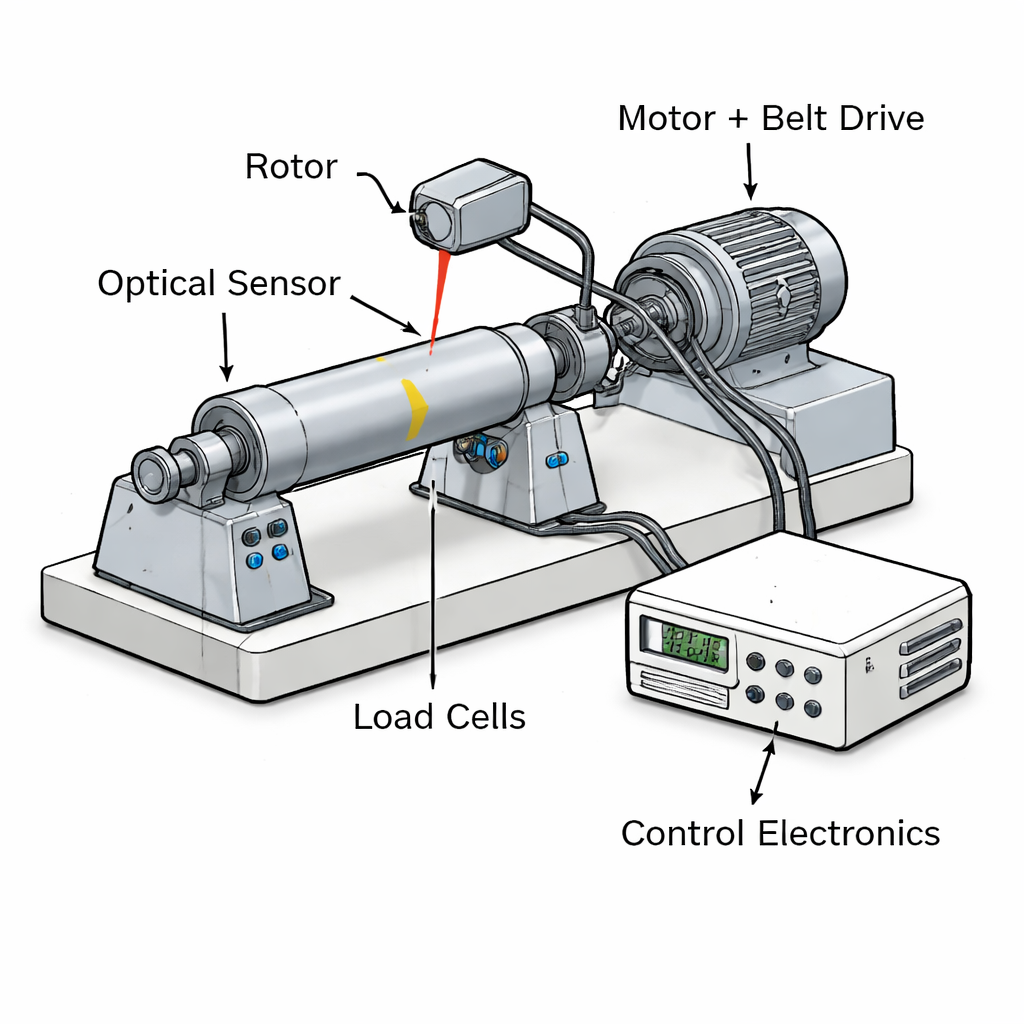
Ekip, iki düzlemli bir dengeleme cihazı tasarladı; bu, rotorun tek bir ince disk gibi ele alınması yerine her iki ucundaki dengesizliği düzeltebileceği anlamına geliyor. Rotor, farklı uzunluk ve çaplara uyacak şekilde ayarlanabilir destekler üzerine yerleştiriliyor ve kayış ve dişli sistemiyle bir DC motor tarafından tahrik ediliyor. Desteklerin altında iki küçük yük hücresi kuvvet sensörleri olarak görev yaparken, optik bir sensör rotor üzerindeki küçük bir işareti izleyerek açısal konumu takip ediyor. Bu sensörler birlikte rotorun ne kadar şiddetle sallandığını ve bu sallanmanın hangi açıda gerçekleştiğini ölçüyor. Dahili elektronikler bu sinyalleri dijitale çevirip bir bilgisayara gönderiyor; burada özel yazılım, dengeyi sağlamak için nerelere ne kadar kütle eklenip çıkarılacağını hesaplıyor.
Hız ve titreşimin akıllı kontrolü
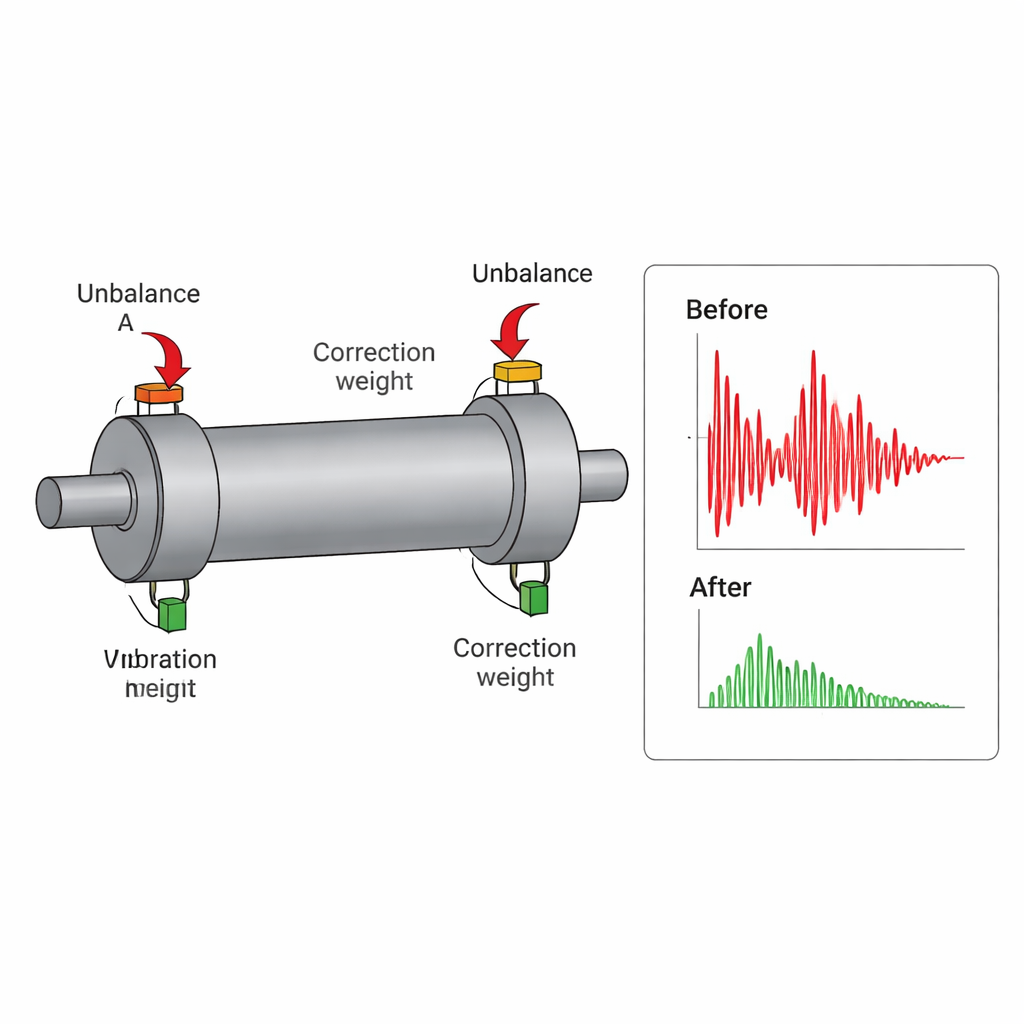
Dengelemenin doğru olabilmesi için rotorun, hizmette kullanacağı hıza yakın bir hızda test edilmesi gerekir; çünkü merkezkaç kuvvetler hızla artar. Geniş bir aralığı kapsamak ama sürücü motoru aşırı yüklememek için cihaz iki hız kontrol yöntemini birleştiriyor: kaba hız bandını seçen mekanik dişli ve kasnak sistemi ile ince ayarlar için darbe genişlik modülasyonu (PWM) ile elektronik motor kontrolü. Araştırmacılar ayrıca etkili ve yerleşik bir teknik olan etki katsayısı (influence coefficient) yöntemini uyguluyor. Basitçe, önce rotorun kendi halinde nasıl titreştiğini ölçüyorlar, sonra farklı konumlara bilinen küçük deneme kütleleri takarak testleri yineliyorlar. Her deneme kütlesinin her iki destekteki titreşimi nasıl değiştirdiğini gözlemleyerek yazılım, her dengeleme düzleminde gerekli düzeltme kütlelerinin büyüklüğünü ve açısını ortaya çıkaran bir denklem setini çözebiliyor.
Yapıyı ve matematiği test etmek
Bir rotoru yaklaşık 10.000 devir/dakikaya yakın döndürmek, test düzeneğinin kendi doğal titreşim modlarını uyarmaya yol açabilir; bu da ölçümleri bulanıklaştırır. Bunu önlemek için yazarlar, dengeleyicinin yapısını mühendislik simülasyon yazılımıyla modelleyip çok sayıda küçük elemana ayırdı ve doğal frekanslarını ile titreşim biçimlerini hesapladı. Bulunan en düşük doğal frekans yaklaşık 216 hertz idi; bu da 10.000 devir/dakikaya karşılık gelen yaklaşık 167 hertzin üzerinde kalarak cihazın çalışma aralığında rezonansa girmeyeceğini gösteriyor. Ardından farklı kütlelere sahip kasıtlı olarak dengesiz rotorlarla hareket simülasyonları gerçekleştirdiler. Her adımda gerçek testlerdekiyle aynı etki katsayısı prosedürünü uyguladılar, düzeltme kütlelerini hesapladılar ve bunları sanal modelde “yerleştirdiler”. Simüle edilen titreşim seviyeleri belirgin şekilde düştü ve bu da denklem ve yazılım mantığının amaçlandığı gibi çalıştığını doğruladı.
Gerçek dünya kusurlarıyla başa çıkmak
Pratikte hiçbir kurulum mükemmel değildir: iki kuvvet sensörü arasındaki küçük bir yükseklik farkı bile rotoru eğebilir ve ölçümlere istenmeyen kuvvetler karışmasına neden olabilir. Yazarlar bunu simülasyonlarında kontrollü hizalama hataları vererek incelemiş ve dengeleme prosedürünü tekrar etmiştir. Yükseklik hatası arttıkça hesaplanan düzeltme kütlelerinin ideal değerlerden daha fazla sapma gösterdiğini buldular. Bu hatanın ne kadar hızlı arttığını inceleyerek, iki sensör düzleminin yaklaşık çeyrek milimetre içinde hizalanmasının yüksek hızlı dengeleme için kütle hatasını kabul edilebilir bir aralıkta tuttuğu sonucuna vardılar. Bu, atölye ve laboratuvarlarda cihazın montajı ve bakımı için pratik bir rehberlik sağlıyor.
Daha düzgün rotorlar, daha uzun ömürlü makineler
Genel olarak bu çalışma, hassas sensörleri, esnek hız kontrolünü ve kanıtlanmış bir dengeleme algoritmasını tek bir sistemde birleştiren kompakt bir yüksek hızlı rotor dengeleyici sunuyor. Yapısal simülasyonlar cihazın güvenle 9500 devir/dakikaya kadar çalışabileceğini gösterirken, hareket çalışmaları hafif rotorlar için bile etkili düzeltme kütlelerini hesaplayıp uygulayabildiğini kanıtlıyor. Uzman olmayanlar için çıkarılacak ana nokta, bu tür bir aracın dönen parçaların düzgün çalışmasını sağlamayı kolaylaştırdığı; bunun da daha sessiz cihazlar, daha iyi enerji kullanımı ve elektrik motorlarına dayanan birçok makinenin daha uzun hizmet ömrü anlamına geldiğidir.
Atıf: Gharehcheloo, P.K., Saberi, F.F. & Shamshirsaz, M. Design and validation of a high-speed rotor balancer based on influence coefficient method and dual-speed control. Sci Rep 16, 7752 (2026). https://doi.org/10.1038/s41598-026-38071-z
Anahtar kelimeler: rotor balansı, elektrik motorları, titreşim, yüksek hızlı makineler, durum izleme